本课程是电子资源,所以行文并不会有太多条条框框的约束,但会以逻辑清晰、浅显易懂为目标,水平有限,若有不足之处,还请不吝赐教!个人微信:EthanYs6,加我申请进技术交流群 StereoV3D,一起技术畅聊。CSDN搜索 :Ethan Li 李迎松,查看网页版课程。随课代码,将上传至github上,地址:StereoV3DCode:ethan-li-coding/StereoV3DCode(https://github.com/ethan-li-coding/StereoV3DCode)
大家好,上一篇:立体视觉入门指南:关键矩阵(本质矩阵,基础矩阵,单应矩阵)https://zhuanlan.zhihu.com/p/377794028中,我们对立体视觉的3个关键矩阵:本质矩阵 E 、基础矩阵 F、单应性矩阵H作了较为详细的描述,同时给出了本质矩阵、单应性矩阵的求解方法以及本质矩阵分解外参R,t 的具体公式。更加难能可贵的是,我们在博文最后提供了几个作业题并在Github开源了参考答案代码【我知道很多心理都在默念李博666】【当然肯定也有一些人在默念这太easy了李博能不能上点难度】。无论如何,博主觉得这是一件有意义的事情,只希望没有误人子弟。而本篇的内容,则是立体视觉的绝对核心模块:相机标定。虽然它因为技术相对成熟,如今研究的人不多,也容易被人忽略,往往用一个开源算法库如Opencv或者Matlab标定工具箱就直接搞定,但实际在立体视觉工程化、产品化时,开源工具由于其精度不高、灵活度低而不建议直接使用,企业往往是自己开发相机标定算法。相机标定作为立体视觉的核心模块,掌握其理论是相当必要的,对我们深入理解立体视觉技术大有帮助,有开山辟路之效
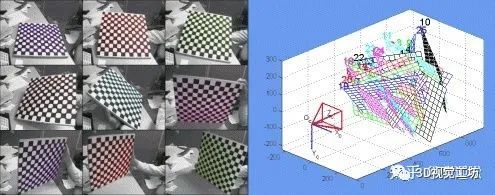
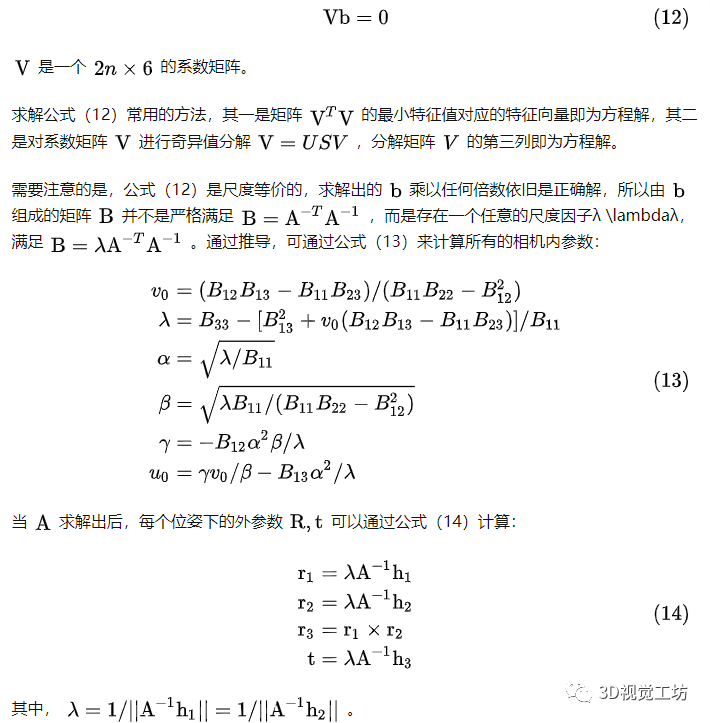
这是一个典型的线性方程组,系数矩阵的行数为2,求解6维向量 b 。由公式(4),当相机在1个位姿下拍摄标定板图案后,经过角点的像素坐标提取,可得所有角点的世界坐标系和像素坐标系的对应关系,进而通过线性方程组的最小二乘解法求解当前位姿下的单应性变换矩阵 H ,可得公式(11)的具体表达式。 但公式(11)的系数矩阵只有2行,要求解6维向量b是不够的。所以我们需要相机在n个位姿下拍摄标定图案,得到n个单应性矩阵,以及行数为2n的系数矩阵,当 n>=3 时,便可求解6维向量 b 。也就是说至少3张图片才能完成相机标定。最后得到的总方程组可表达为:
- [1] Zhang Z . A Flexible New Technique for Camera Calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11):1330-1334.本文仅做学术分享,如有侵权,请联系删文。—THE END—

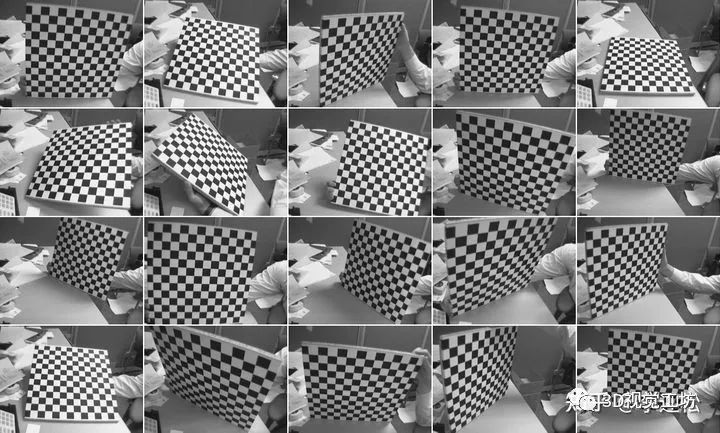
 所谓标定,即是由大量观测值拟合参数模型的过程,且在此拟合的参数模型是已知的,所以应尽可能探索能便捷获取大量观测值的方案,如果观测值之间还满足一些其他的几何约束就更有助于求解具体单个参数值。
所谓标定,即是由大量观测值拟合参数模型的过程,且在此拟合的参数模型是已知的,所以应尽可能探索能便捷获取大量观测值的方案,如果观测值之间还满足一些其他的几何约束就更有助于求解具体单个参数值。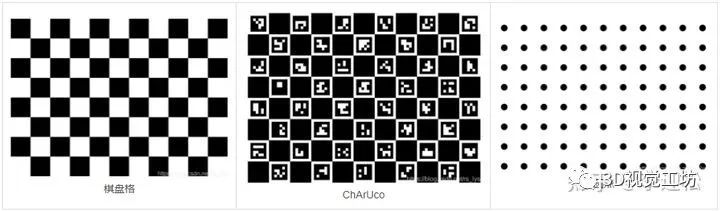

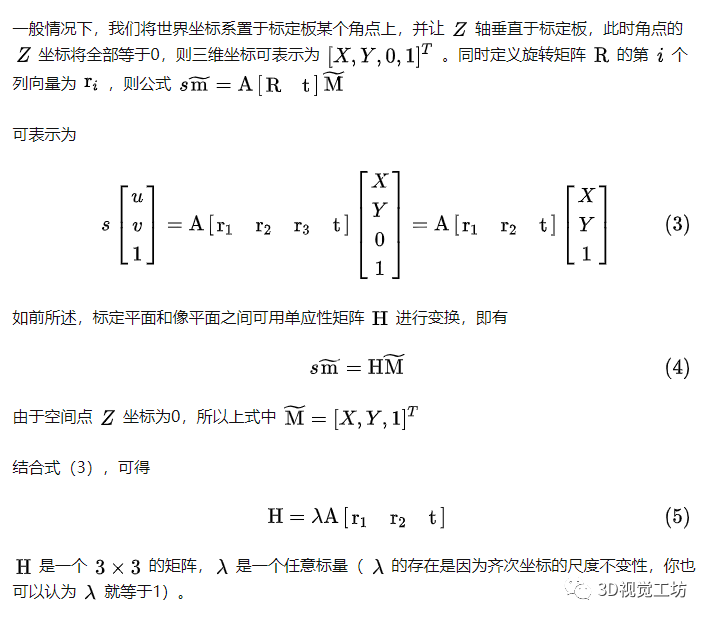
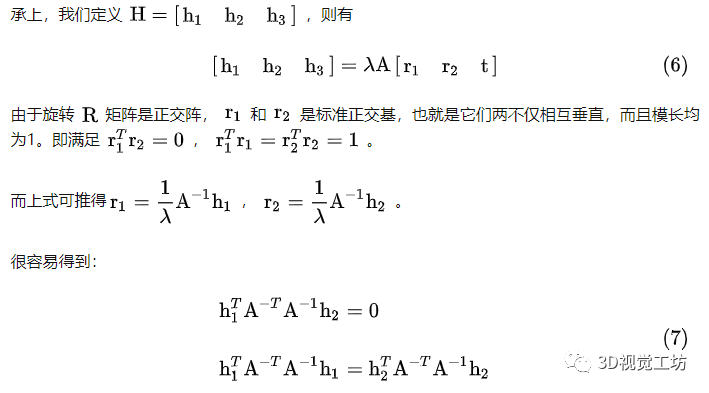
 坐标等于0的三维坐标(将世界坐标系的原点放在标定板的某个角点,Z轴垂直于标定板)。
坐标等于0的三维坐标(将世界坐标系的原点放在标定板的某个角点,Z轴垂直于标定板)。