优化问题都需要哪些数学基础
本文转载自:机器之心 作者:Tivadar Danka

























 是观测值为
是观测值为 的第 i 个数据点
的第 i 个数据点


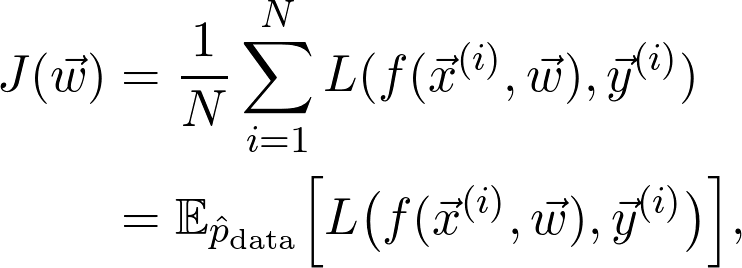
 是训练数据给出的(经验)概率分布。可以将序列写成:
是训练数据给出的(经验)概率分布。可以将序列写成:

 是真正的总体分布(这是未知的)。再详细点说,因为增加了训练数据,损失函数收敛到真实损失。因此,如果对数据二次采样,并计算梯度:
是真正的总体分布(这是未知的)。再详细点说,因为增加了训练数据,损失函数收敛到真实损失。因此,如果对数据二次采样,并计算梯度:







评论
 下载APP
下载APP本文转载自:机器之心 作者:Tivadar Danka
是观测值为的第 i 个数据点
是训练数据给出的(经验)概率分布。可以将序列写成:
是真正的总体分布(这是未知的)。再详细点说,因为增加了训练数据,损失函数收敛到真实损失。因此,如果对数据二次采样,并计算梯度: