
Science Robotics封面:轻便低成本、无电子设备驱动的四足软体机器人

大数据文摘授权转载自机器人大讲堂
加州大学圣地亚哥分校的工程师们创造了一种轻便、低成本的四足软体机器人,它通过气动回路就能保持系统控制和运动,并且不需要任何电子设备驱动。该项目由加州大学圣地亚哥分校 Michael T.Tolley 教授领导,发布在 Science Robotics封面。
图丨相关论文(来源:Science Robotics)
软体机器人之所以受到许多关注,是因为它们可以在人的附近进行安全操作,并且适应环境能力较强。加州大学圣地亚哥分校 Dylan Drotman 博士表示:“这项工作代表着向完全自主、无电子行走机器人迈出了重要的一步。”
软体机器人在不断地升级迭代,从只能奔跑升级到拥有充气抓手,从而有能力处理各种物品。充气部件和气压在其中发挥了至关重要的作用,大多数软体机器人由压缩空气提供动力,并由电子设备控制。但是,这种方法需要电路、阀门和泵等位于机器人体外的组件。通常,那些组成机器人大脑和神经系统的组件体积庞大且昂贵。
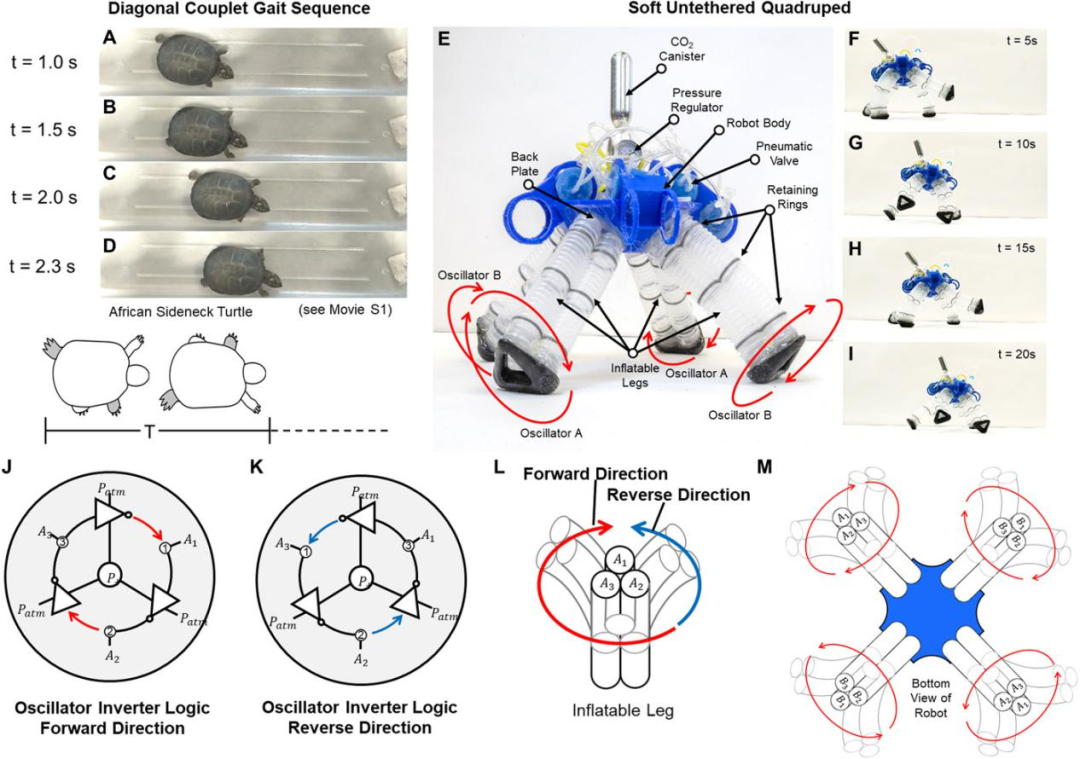
图丨四足软体机器人具有不受生物影响的步态模式,可通过无电子气动控制系统进行控制(来源:Science Robotics)
该项目软体机器人则不同,它的气动电路系统控制由管子和软阀组成,可根据指令或从环境中感应到的信号进行判断,进而行走。机器人由脊柱驱动,计算能力与哺乳动物的反射相似。研究团队的灵感来自动物体内发现的神经回路,通过产生节奏来控制步行和跑步等动作。
研究团队在气动阀的振荡器和传感器的基础上,又添加了实现高级功能(如行走)所需的组件。气动阀具有价格便宜、重量轻的优势,并且相对于与机电阀更易于制造,通常用于控制软体机器人。通过适当的设计,这些组件可创建复杂的流体组合,无需任何电子设备即可控制腿式机器人步态的电路。
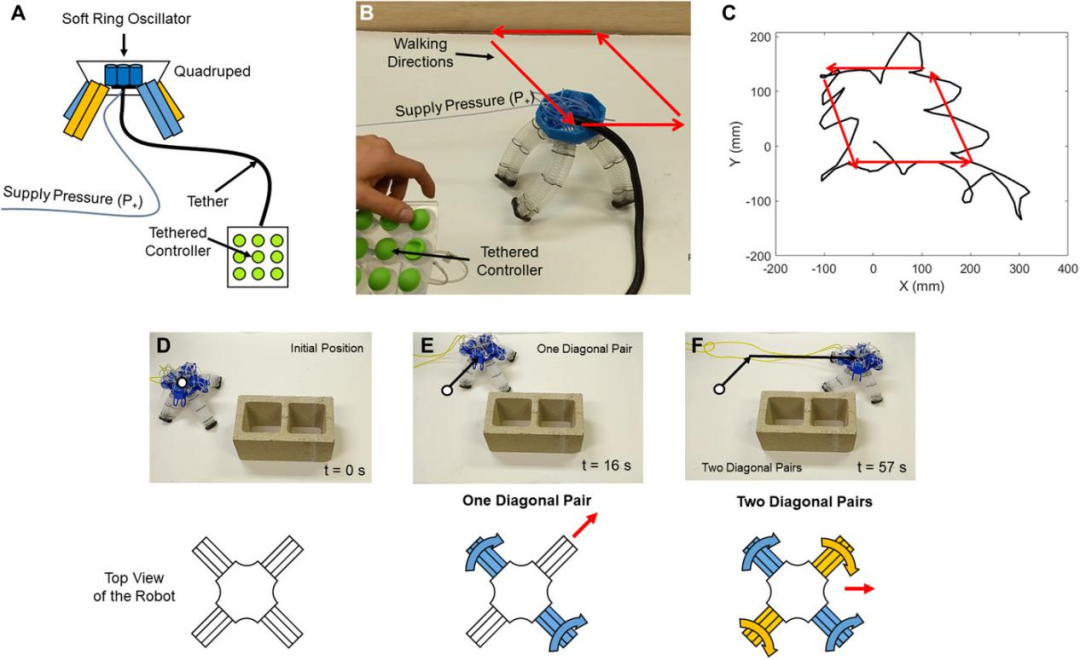
图丨四足机器人的束缚控制(来源:Science Robotics)
这款机器人由四个圆柱形腔室系统组成。为模拟发电机的功能,工程师建立了一个阀门系统,它可充当振荡器,控制加压空气进入机器人四肢中由气动肌肉进入的顺序。据该团队介绍,采用该方法可制造出非常复杂的机器人大脑,而他们的重点是制造控制步行所需的最简单的气动神经系统。
另据悉,该机器人的步态受侧颈乌龟启发,为此研究人员构建了一个创新组件,通过延迟向机器人腿中注入空气来协调机器人的步态,当按特定顺序打开和关闭的阀门便可以实现行走。同时,在软体机器人身体的臂架末端,有微型气泡式的传感器装置。也就是说当软体机器人遇到障碍物时,它装置中的气泡会出现凹陷状态,促使阀门翻转、以及反向移动。
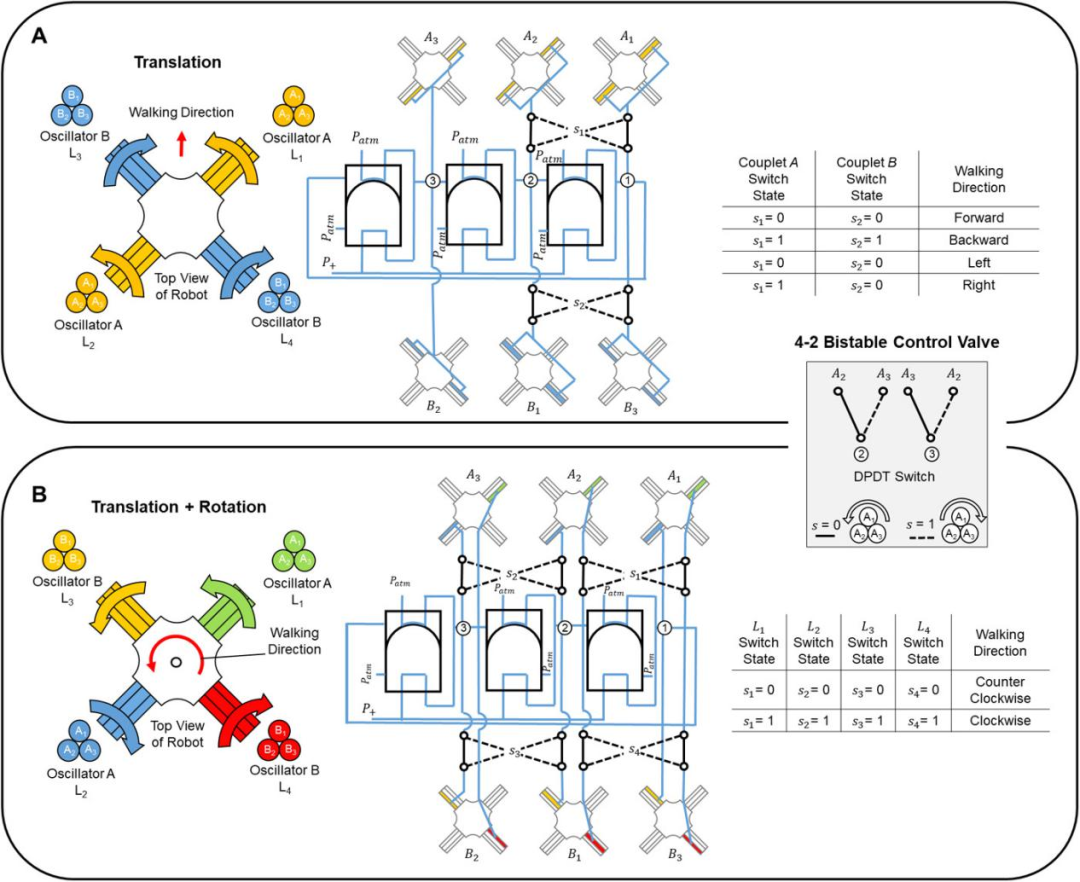
图丨使用 4/2 阀门对机器人的行走方向进行全方位控制(来源:Science Robotics)
为了测试对软体机器人全向运动的控制度,研究团队开发了一种控制器来操作两个 4/2 阀门。通过更改相应的气门状态,依次命令机器人向前、向左、向后,然后向右行走。
软体机器人的每条腿都可以实现三个运动角度的弯曲,支腿向下倾斜 45 度,由三个平行且相互连接的、带有波纹管的气动气室组成。当对腔室进行加压时,肢体会向相反的方向弯曲。
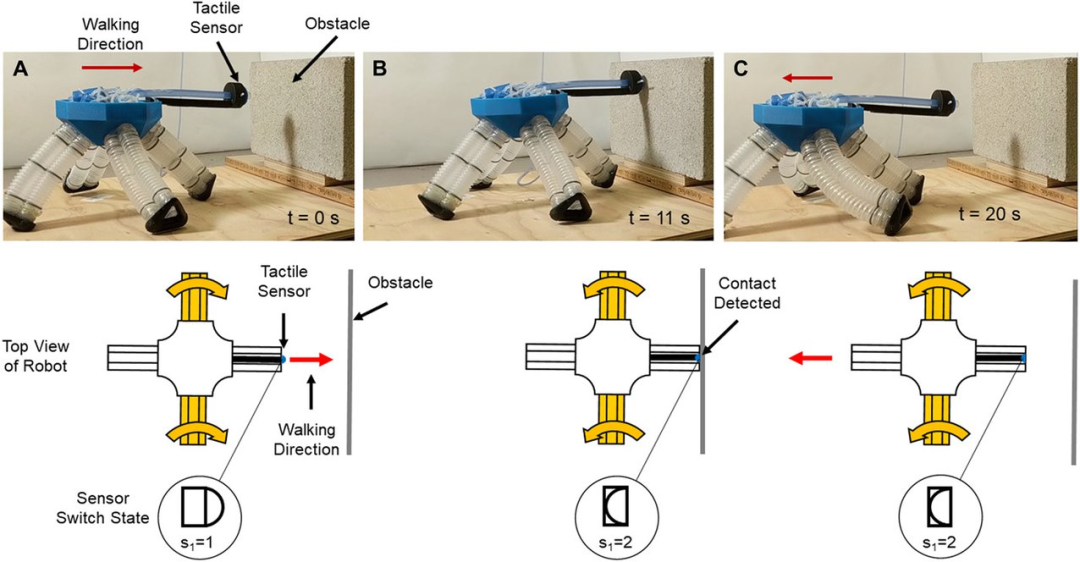
图丨传感器输入用于自动步态逆转(来源:Science Robotics)
研究人员将每条腿的对角线彼此配对,进而简化了控制。一个软阀在逆时针和顺时针之间切换肢体的旋转方向,该软阀相当于双掷开关,即具有两个输入和四个输出的开关,因此每个输入都有与其连接的两个对应的输出。这种机制有点像需要两条神经并在大脑中交换它们的连接。
概括来说,本次研究是低成本机器人技术的突破,这种软体机器人可应用在矿井和核磁共振成像机等电子设备无法使用的领域。研究团队表示,希望在这项研究的基础上,能够改进机器人的步态,让它能在更崎岖的地面也能实现自由行走。
https://techxplore.com/news/2021-02-quadruped-powered-pressurized-air.html
https://robotics.sciencemag.org/content/6/51/eaay2627
