
Science Robotics 最新封面论文|无电子元件,软体机器人如何行走?

1
无电子元件的机器人
研究背景

工作原理
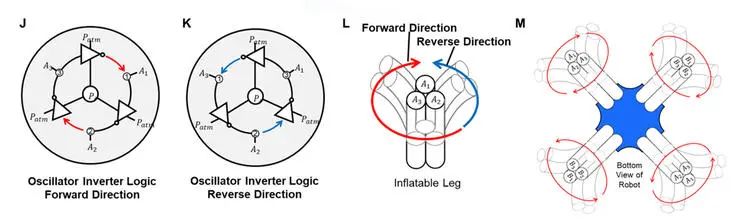
使用 3 个气动记忆元件(阀门)即可控制基本步态; 通过 2 个振荡器电路(7 个阀门),即可将运动速度提高 270%。
事实证明,要想使机器人完成相对复杂的自主行为,可以有很多聪明的方法。
2
软体机器人如何发展?
这项研究是迈向完全自主无电子元件机器人应用的一步,不论是低成本娱乐机器人的发展,还是在极端环境下机器人的应用,这款研究都起到了推动作用。

本质上,软体机器人应该是安全的、灵活的、非常便宜的,这些特征使其有望得到广泛应用。但相对于其他领域的机器人,软体机器人发展较慢,其中一个原因就是软体机器人不能直接受益于过去几十年里算力、传感器和致动器等的显著发展。
https://robotics.sciencemag.org/content/6/51/eaay2627
https://www.youtube.com/watch?v=LdBLkM0ZmEw
http://www.learningaboutelectronics.com/Articles/Double-pole-double-throw-switch-DPDT
https://www.youtube.com/watch?v=X5caSAb4kz0&feature=emb_imp_woyt
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/soft-legged-robot-pneumatic-circuitry
本文由雷锋网原创,作者:付静。申请授权请回复“转载”,未经授权不得转载。

酷开15年,创维没想到

5G确定性网络,是不是未来?
评论