
UC San Diego清华大学CVPR2022《具身人工智能》教程

来源:专知 本文为教程介绍,建议阅读5分钟 来自 UC San Diego清华大学多位学者讲述了《具身人工智能》教程,200+页ppt值得关注。
近年来,人们对计算机视觉中的具身人工智能研究越来越感兴趣。在研究界已经举办了多个嵌入式AI研讨会和挑战,包括ICLR 2022年物理世界的广义策略学习、IROS 2020年的OCRTOC:开放云机器人表组织挑战、CVPR 2019年的栖息地:嵌入式agent挑战和研讨会,以及CVPR 2020年和2021年的嵌入式AI研讨会。计算机视觉现在是具身人工智能研究的一个重要模块,但我们仍然缺少一个基本的教程来指导研究人员,尤其是那些有视觉和机器学习背景的研究人员,开始在这个领域。
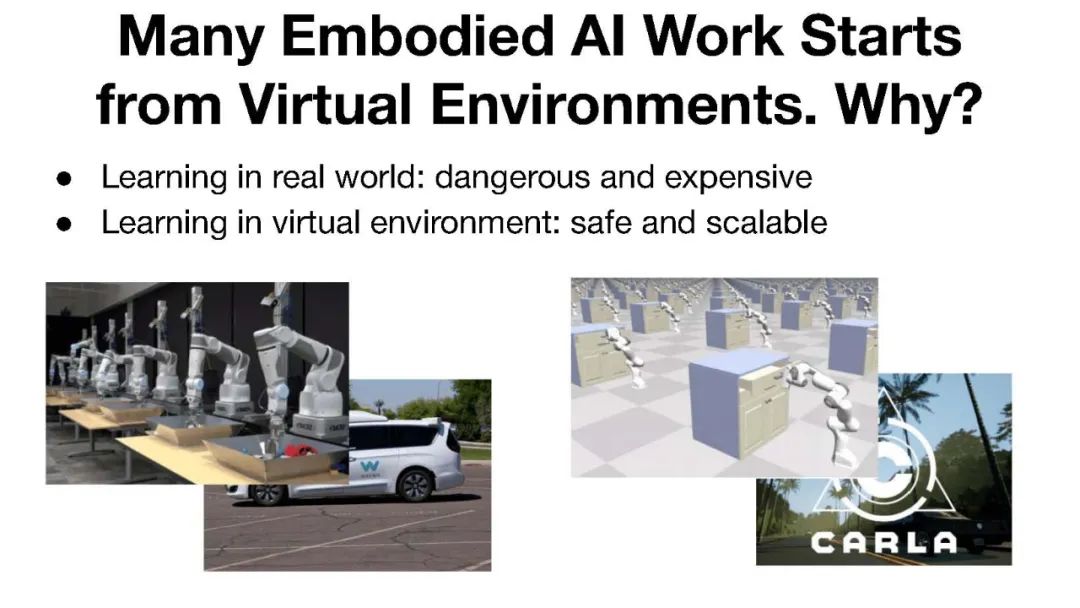
特别是,在物理模拟和渲染技术的最新进展的推动下,虚拟环境中的具身AI已经取得了许多令人印象深刻的进展。这些平台使得许多视觉机器人问题的研究成为可能,而这些问题在现实世界中是无法进行大规模研究的。更快的速度、更容易的并行化、更简单的数据收集和更低的成本的本质允许模拟中的嵌入式AI研究建立更大的社区,具有不同的研究人员背景、改进的代码共享和标准基准。但是,虚拟环境也有其自身的问题,例如模拟参数和域间隙,在构建和使用它们时值得注意。
我们的教程旨在为计算机视觉研究人员提供入门指南,以研究环境中具身代理的视觉问题,以及突出使用这些环境时遇到的常见问题。本教程将侧重于跨平台共享的原则,并教授使用多个模拟环境的概念。
https://ai-workshops.github.io/building-and-working-in-environments-for-embodied-ai-cvpr-2022/
评论