
dToF与iToF技术解析
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
苹果公司近期正式推出了新款iPad Pro,吸引了不少人的关注。在官方的宣传标语中,有一句话尤其引人关注,“它的Pro级摄像头打通了真实和虚拟的交界”。
新款iPad Pro搭载的Pro级摄像头不仅包含了全新的超广角摄像头,还包含了一款激光雷达扫描仪。该扫描仪利用dToF技术,结合运动传感器和iPadOS内的架构,可以进行深度测量,为增强现实及更广泛的领域开启无尽可能。
那么dToF是什么呢,它和我们之前市面上已有的iToF又有什么不同呢?
本文将会介绍dToF和iToF的成像原理,对比分析dToF和iToF两者的差异性,带领大家了解一下ToF领域。
一.TOF
首先,让我们先来了解一下ToF的基本概念。
Time-of-Flight(ToF),顾名思义,是一种利用光飞行时间的技术。接触过3D视觉的读者应该知道,ToF和结构光、双目立体视觉是近年来三种主流的3D成像方式。ToF向场景中发射近红外光,利用光的飞行时间信息,测量场景中物体的距离。ToF相比较另外两种3D成像方式,深度信息计算量小,抗干扰性强,测量范围远。种种优势推动了ToF在机器人、交互以及其他工业领域中的应用。尤其是在移动端,已有多品牌手机,比如华为、OPPO、苹果,将其用于手机后置摄像。
二.dTOF和iTOF
了解了ToF的概念之后,让我们再来深入了解一下两类ToF的基本成像原理,也就是文章标题中提到的iToF和dToF。
dToF,全称是direct Time-of-Flight。顾名思义,dToF直接测量飞行时间。dToF核心组件包含VCSEL、单光子雪崩二极管SPAD和时间数字转换器TDC。Single Photon Avalanche Diode(SPAD)是一种具有单光子探测能力的光电探测雪崩二极管,只要有微弱的光信号就能产生电流。dToF模组的VCSEL向场景中发射脉冲波,SPAD接收从目标物体反射回来的脉冲波。Time Digital Converter(TDC)能够记录每次接收到的光信号的飞行时间,也就是发射脉冲和接收脉冲之间的时间间隔。dToF会在单帧测量时间内发射和接收N次光信号,然后对记录的N次飞行时间做直方图统计,其中出现频率最高的飞行时间t用来计算待测物体的深度。
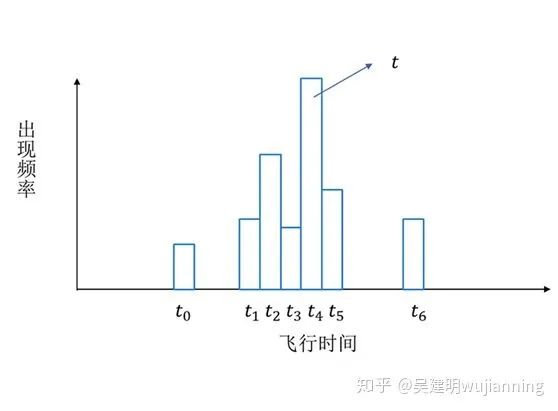
图1是dToF单个像素点记录的光飞行时间直方图,其中,高度最高的柱对应的时间就是该像素点的最终光飞行时间。
dToF的原理看起来虽然很简单,但是实际能达到较高的精度很困难。除了对时钟同步有非常高的精度要求以外,还对脉冲信号的精度有很高的要求。普通的光电二极管难以满足这样的需求。而dToF中的核心组件SPAD由于制作工艺复杂,能胜任生产任务的厂家并不多,并且集成困难。所以目前研究dToF的厂家并不多,更多的是在研究和推动iToF。
iToF的概念和dToF相对应,全称是indirect Time-of-Flight,直译就是间接光飞行时间。所谓间接,就是指iToF是通过测量相位偏移来间接测量光的飞行时间,而不是直接测量光飞行时间。
iToF向场景中发射调制后的红外光信号,再由传感器接收场景中待测物体反射回来的光信号,根据曝光(积分)时间内的累计电荷计算发射信号和接收信号之间的相位差,从而获取目标物体的深度。如图2所示。
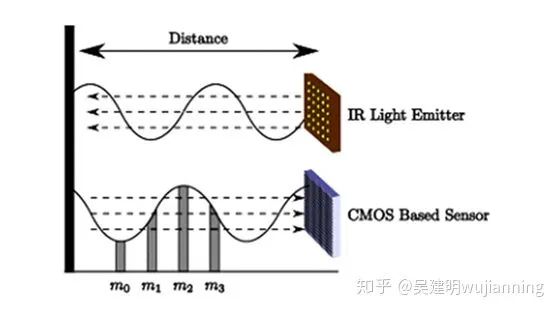
图2. iToF成像原理示意图[1]
iToF模组的核心组件包含VCSEL和图像传感器。VCSEL发射特定频率的调制红外光。图像传感器在曝光(积分)时间内接收反射光并进行光电转换。曝光(积分)结束后将数据读出,经过一个模拟数字转换器再传给计算单元,最终由计算单元计算每个像素的相位偏移。iToF计算深度的方式通常是采用4-sampling-bucket算法,利用4个相位延迟为0°,90°,180°和270°的采样信号计算深度。如图3所示
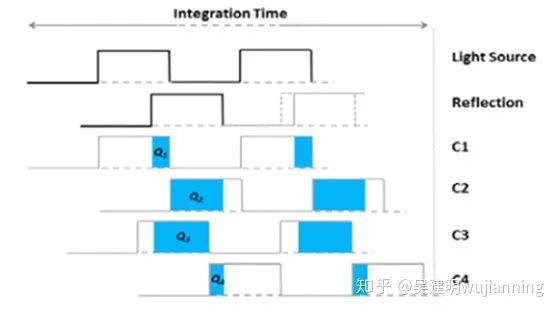
图3. 连续波调制方式测相位偏移原理示意图[2]

三.性能对比
dToF和iToF虽然都是利用光飞行时间技术,但是两者在测距原理和硬件实现上都有差异。软硬件的差异会导致这两类ToF在各方面的性能表现上各有千秋。
衡量ToF的性能指标,需要考虑几个方面。因为ToF是一个可以测距的相机,作为一个测距设备,基本的评价指标有测距精度和有效探测距离。其次,作为相机而言,图像分辨率也是一个重要的评价指标。此外,由于ToF本身只能提供3D信息,它将来更多的发展是集成到3D相关的应用,比如3D建模、AR以及移动平台。在集成到其他3D相关的应用时,尤其是移动端和机器人平台,必须要考虑它的能耗和成本,以及在各种复杂场景下的抗干扰能力。以上的这些特性,决定了dToF和iToF有着各自适用的应用场景。
接下来,本文会从精度、有效探测距离、图像分辨率、能耗、成本、抗干扰等7个方面,对比iToF和dToF的优劣。
精度
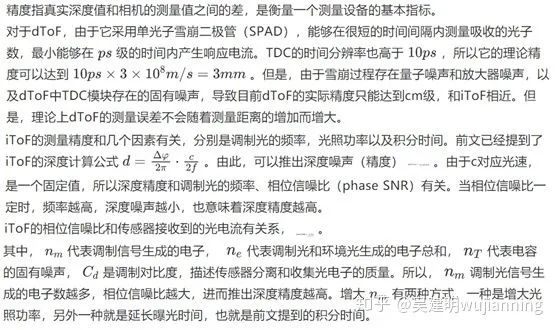
总的来说,目前的iToF深度精度在 cm 级,并且随着测量距离的增大,反射光的强度减小,相位测量的信噪比减小,绝对误差也会随之增大。
有效探测距离
有效探测距离指相机能够输出可靠深度的距离范围,可靠深度意味着该深度值和真实值的误差小于一定阈值。举个简单的例子,假设测量误差在2cm以内时,我们视作该深度值是可靠的。如果一个ToF模组测量5米的物体时,测量值是5.02米,误差刚好达到了预先定义的极限。当物体位于5.01米时,测量值是5.22米,误差超出了2cm。我们就可以说该ToF模组的有效探测距离是5米。
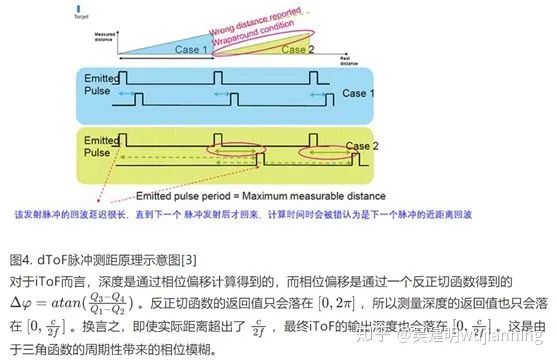
当然,限制ToF的有效探测距离的主要因素之一是相位模糊现象。
对于dToF而言,当测量距离较远时,光飞行一个来回的时间超过了两次连续发射脉冲的间隔,传感器在发射第二个测量信号后,才接收到第一个测量信号的反射波,就会把该反射波错认为是第二个测量信号的近距离反射波,这时就会出现相位模糊现象。如图4所示。图4中case1表示的是近距离场景下dToF的测距原理图,case2表示的是远距离场景下,发生相位模糊现象的测距原理图。
§ dToF会受到测量频率(相邻两次测量的间隔时间)限制,iToF的有效探测距离会受到调制光的频率限制。dToF在测量远距离物体时,可以适当增加两次测量之间的间隔,减少测量次数。但是,减少测量次数会同时降低测量精度,相当于是用精度换取有效探测距离。而iToF也可以通过降低调制光的频率,从而牺牲一定的测量精度以获得更远的有效探测距离。
对于iToF而言,可以利用双频解决相位模糊现象。利用两个不同频率的测量数据去求解相位模糊度,从而恢复正确深度值。借助双频测量可以同时实现高精度测量和高有效探测距离。
能耗
从发射信号来看, dToF则采用 级的脉冲激光,iToF目前大多采用连续波调制。相比较而言,脉冲波能够达到超低占空比,所以功耗也较低。
从光照模式来看,由于dToF的测量精度不会随着测量距离的增大而降低,所以功耗也会相对较低。反之,iToF目前采用的大多是面光发射方式。并且,随着测量距离的增大,iToF需要提高光照功率或者延长曝光时间来获取更高的精度,所需的功耗也会大幅增加。
成本
dToF采用的是数字电路架构,不需要模数转换。iToF采用的是模拟电路结构,需要模数转换芯片。
对于整体的硬件架构而言,dToF的核心组件SPAD的制作工艺复杂,现有的资源少。iToF没有这方面的顾虑。
在系统集成方面, dToF还需要额外的时间处理电路,系统集成难度较高。iToF的系统集成容易,不需要额外的测量电路。
抗环境干扰
环境干扰包括场景中环境光干扰、多路径反射光干扰以及不同表面灰度等影响。这一类环境干扰发生在外界,和ToF本身的关系不大,环境干扰的差异主要是由不同ToF的测距原理引起的。
dToF单帧深度图获取时,会经历多次重复测量,并且采用时间直方图统计的方式计算飞行时间,比较容易区分信号中的干扰成分。抗环境干扰能力更强。
iToF在曝光阶段,部分环境光混杂在调制光中被传感器接收,然后计算相位偏移。无法从单次测量的结果中区分出环境光引起的干扰。环境光越强,相应的,引起的深度误差也越大。
应用场景
dToF功耗低,并且体积小巧,更加适合工业机器人等需快速进行测距避障检测的应用,以及其他在空间受限的紧凑型设计中。
dToF抗环境干扰表现比较好,目前在户外场景下的测距精度比iToF更加高,在户外应用场景中也比较占优。
dToF的时间分辨率高,测量距离增大时精度不会大幅衰减,能耗也不会大幅提升,在AR应用中的优势也比较显著。
iToF的图像分辨率较高,在物体识别,3D重建以及行为分析等应用场景中能够重现场景中更多的细节信息,在机器人、新零售等应用领域占优。


dToF和iToF两者的目标都是输出一幅高质量的深度图像,所以两者都需要深度数据层面的滤波和噪声修正,比如空域滤波、点云域的噪声滤波以及非一致性像素校准等。此外,两者都拥有透镜成像系统,所以无论是dToF还是iToF,都需要透镜失真补偿。硬件的温度变化带来的噪声也同时存在于两种ToF中,所以温度补偿也是两者所必需的。
dToF是发射脉冲波,而不是特定频率的调制波,所以dToF不需要做和调制光的频率相关的处理,包括频率校准、自动频率选择、高动态范围(HDR)。但是dToF的发射脉冲也有一定的频率,即相邻两个发射脉冲之间的时间间隔,dToF的频率校准和发射脉冲的频率相关。dToF仅仅输出深度图,而iToF同时输出深度图和幅值图,所以dToF不需要做幅值校准。
此外,由场景干扰引起的多径、相位模糊、运动模糊、内反射等都是两者所共有的问题,虽然dToF因为成像原理的特性具有更好的抗环境干扰能力,但是还是会受到这一类场景干扰的影响。不过不同的是,因为dToF和iToF的成像原理不同,两者所需要的深度修正方式也会有所差异。
dToF和iToF两者因为测距原理和硬件架构的不同,各方面的性能互有优劣,适用场景也不尽相同。两者均面临场景的适应性,如何在任意场景下获取可靠和准确的深度数据是非常大的技术挑战,是ToF技术普及的关键。ToF应用技术的普及有赖于3D ISP增强引擎来消除干扰,降低功耗,提高实时性能;需要面向3D行业的ISP IP及中间件,有力支撑上层应用。所以说3D ISP是3D成像市场爆发的必要条件。数迹智能团队正在研发3D ToF ISP Smart3D-ISP,以ISP技术为核心系统性地提升无论是dToF还是iToF的性能并降低功耗和成本是多年来的研发目标,将我们的3D ToF技术植入每部手机、每辆汽车、每个机器人、每台家电,从而改变机器对世界的“看法”,实现深度的智能。
参考文献
[1] Foix S , Alenya G , Torras C . Lock-in Time-of-Flight (ToF) Cameras: A Survey[J]. IEEE Sensors Journal, 2011, 11(9):1917-1926.
[2] L. Li, Time-of-Flight Camera—An Introduction, Texas Instruments-Technical White Paper.
[3] John Kvam (2017), Time of Flight: Principles, Challenges, and Performance [pdf file].
来源:知乎,作者:吴建明wujianming
本文仅做学术分享,如有侵权,请联系删文。