
3D | 常用3D表示
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
目前 3D 学习中,物体或场景的表示包括显式表示与隐式表示两种,主流的显式表示包括基于 voxel、基于 point cloud、和基于 polygon mesh 三种,隐式表示包括基于 Occupancy Function [1]、和基于 Signed Distance Functions [2] 两种。下表简要总结了各种表示方法的原理及其相应优缺点。
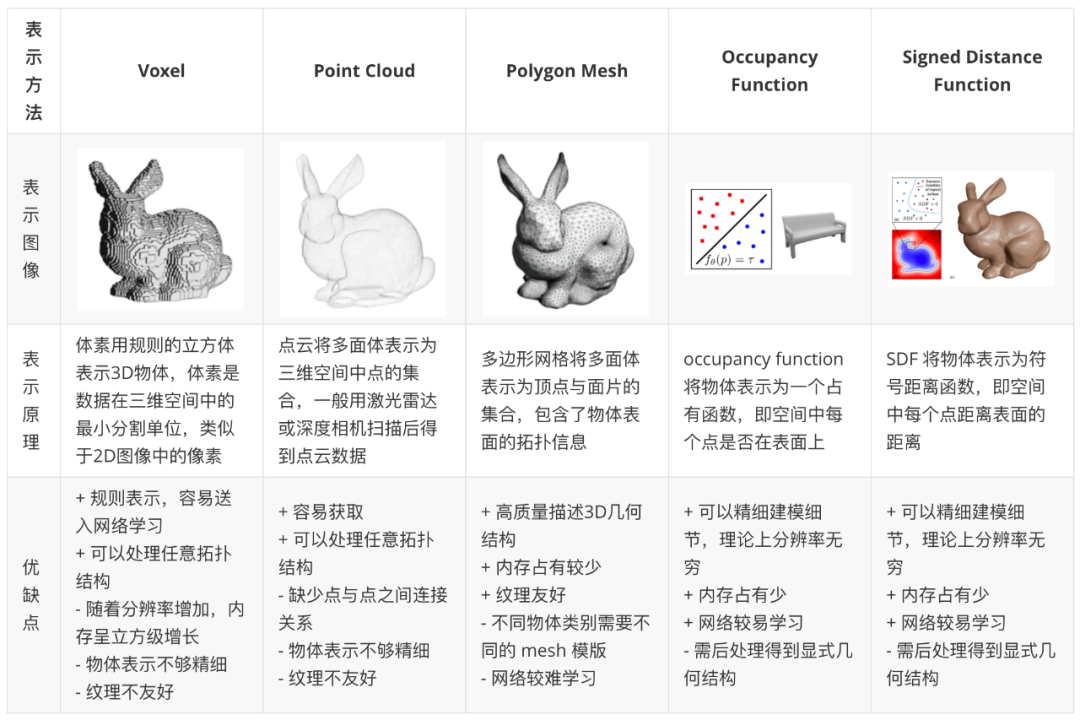

+ 可以处理任意拓扑结构
- 随着分辨率增加,内存呈立方级增长
- 物体表示不够精细
- 纹理不友好

+ 可以处理任意拓扑结构
- 缺少点与点之间连接关系
- 物体表示不够精细
- 纹理不友好
+ 内存占有较少
+ 纹理友好
- 不同物体类别需要不同的 mesh 模版
- 网络较难学习
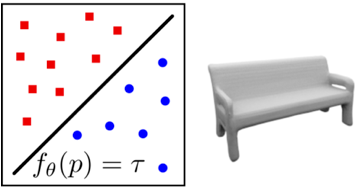
+ 内存占有少
+ 网络较易学习
- 需后处理得到显式几何结构
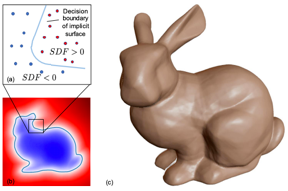
+ 内存占有少
+ 网络较易学习
- 需后处理得到显式几何结构
Reference:
[1] Occupancy Networks: Learning 3D Reconstruction in Function Space. In CVPR, 2019.
[2] DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation. In CVPR, 2019.
本文仅做学术分享,如有侵权,请联系删文。
评论