
乐高小车竟被装上「生物大脑」,无需算法走出蜂巢迷宫!
新智元报道
新智元报道
编辑:小咸鱼 好困
【新智元导读】近日,一位博士给乐高小车装了个「大脑」,并且还让它学会了走迷宫!研究成果已在《Science Advances》发表。
有一种经典的游戏叫走迷宫。
迷宫,往往只有一个入口,一个出口,可是中间能选择的走法却是不胜枚举。
而人类为什么能快速找到走出迷宫的方法呢?
为研究大脑在走迷宫的任务中究竟是怎么想的,科学家们必须先找一个简单的案例,于是,他们把目光转移到了小鼠身上。
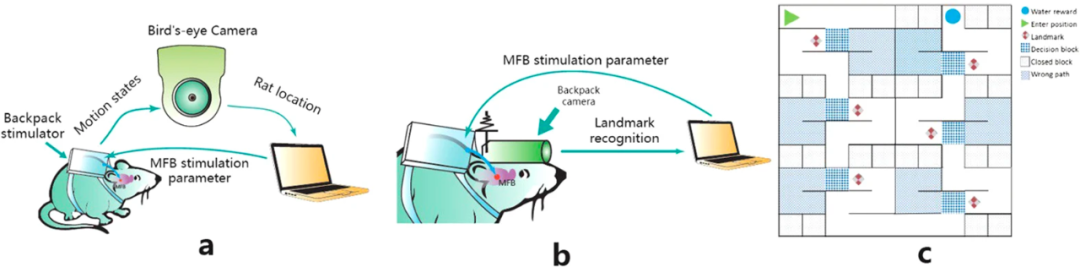
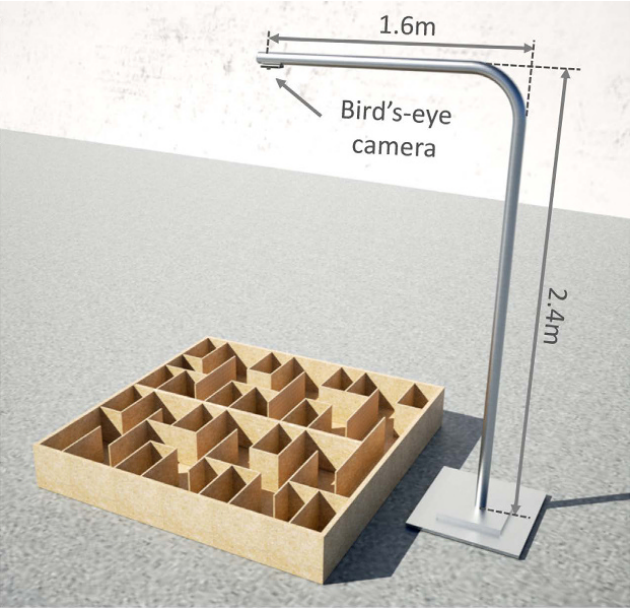
2016年,浙江大学吴朝晖课题组的研究人员在Nature子刊《Scientific Reports》发表了一篇论文,描述了一种结合了小鼠和强化学习算法的混合脑机系统。
https://www.nature.com/articles/srep31746
实验组小鼠的大脑都被植入了电极并连接上了计算机。
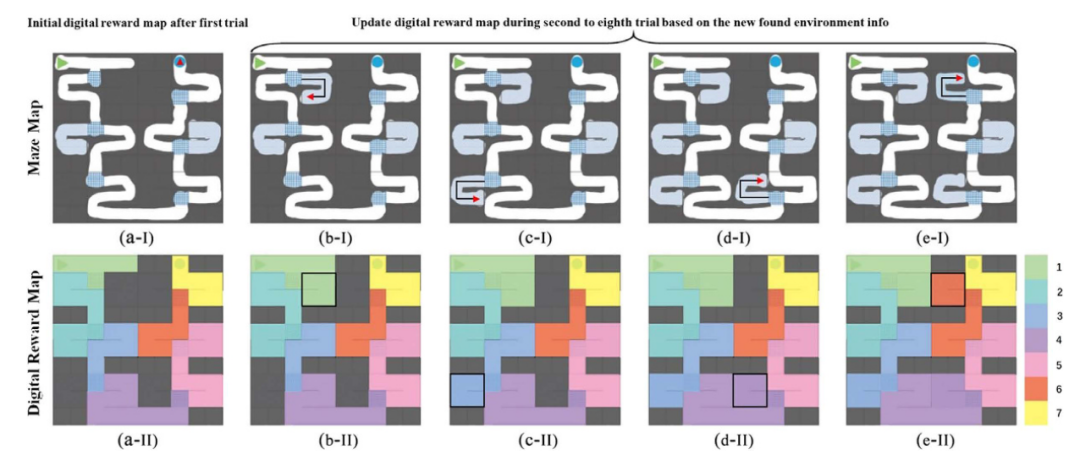

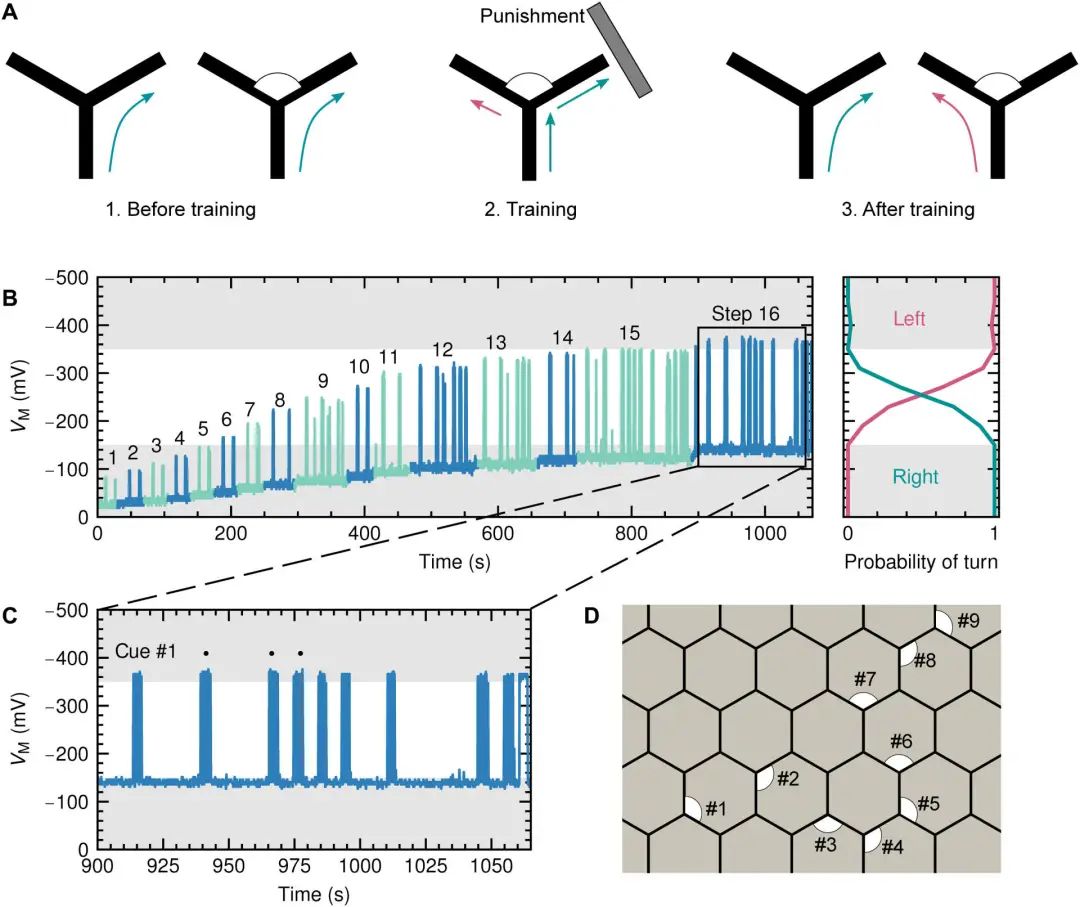
机器人用「大脑」走出迷宫
机器人用「大脑」走出迷宫

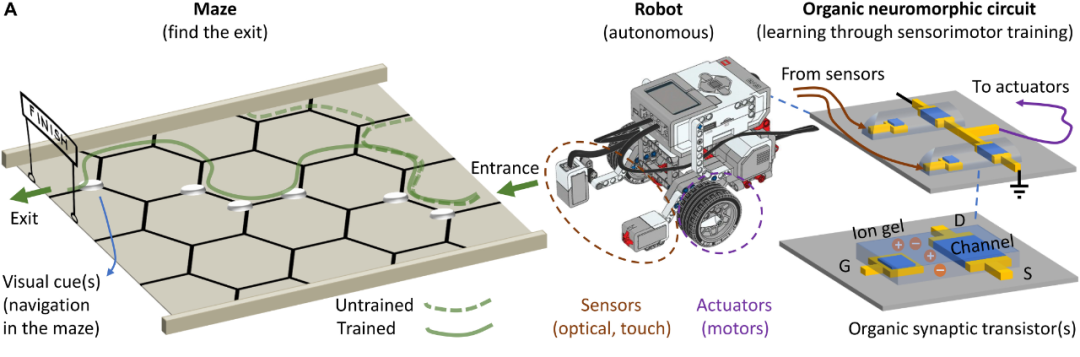
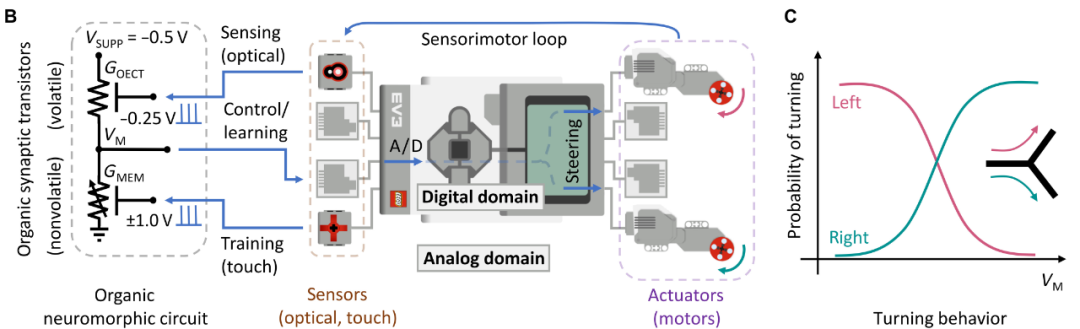

工作原理
工作原理


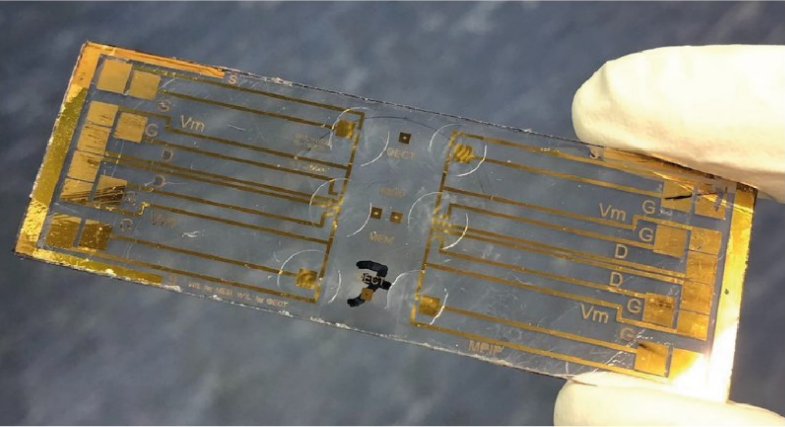
有机聚合物
有机聚合物
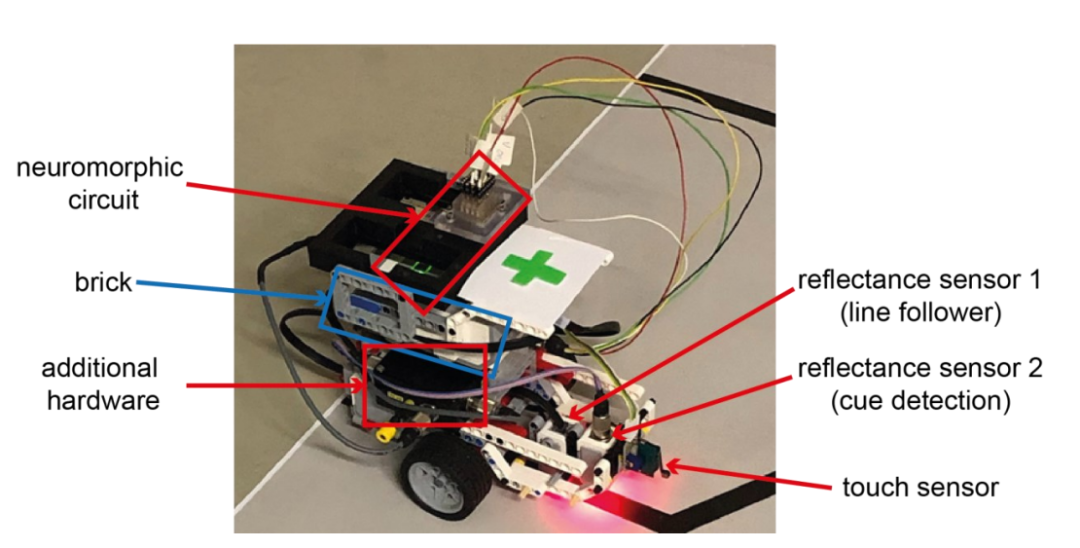
 有机神经形态电路的布局
有机神经形态电路的布局
参考资料:
https://www.science.org/doi/10.1126/sciadv.abl5068
https://www.nature.com/articles/srep31746

评论