
彻底搞懂感受野的含义与计算
极市导读
本文解释了感受野的概念,并举出了感受野大小及中心的计算公式,是一篇很好的入门文章。>>加入极市CV技术交流群,走在计算机视觉的最前沿
什么是感受野
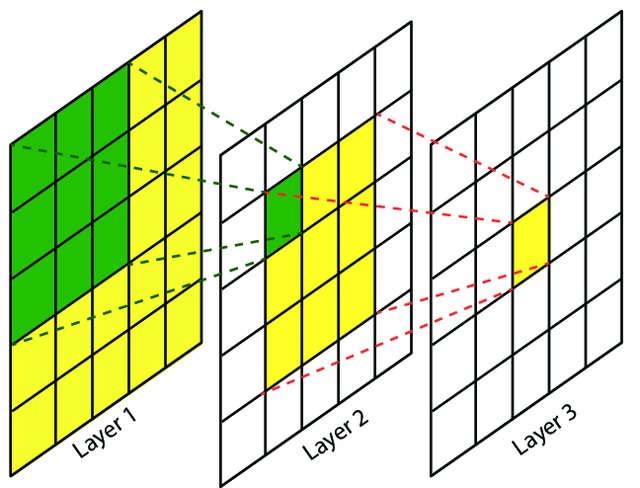
The receptive field is defined as the region in the input space that a particular CNN’s feature is looking at (i.e. be affected by). —— A guide to receptive field arithmetic for Convolutional Neural Networks
约定
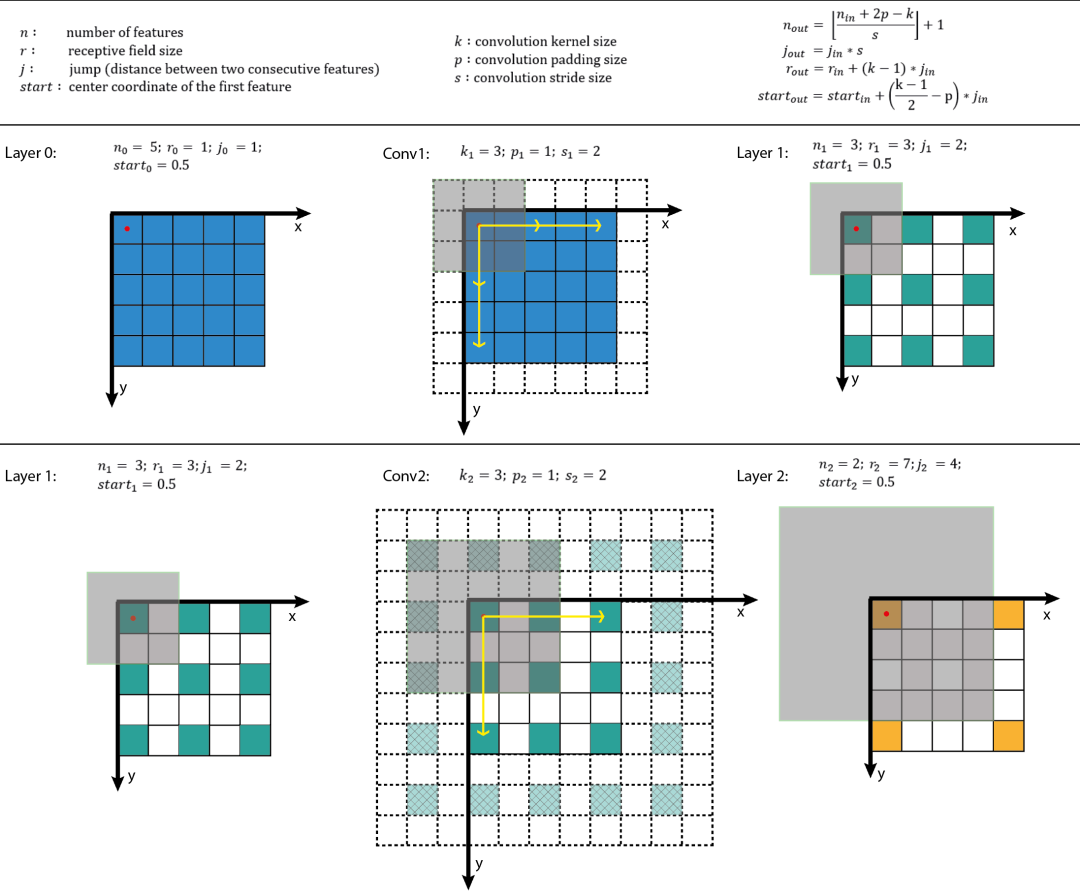
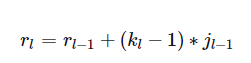
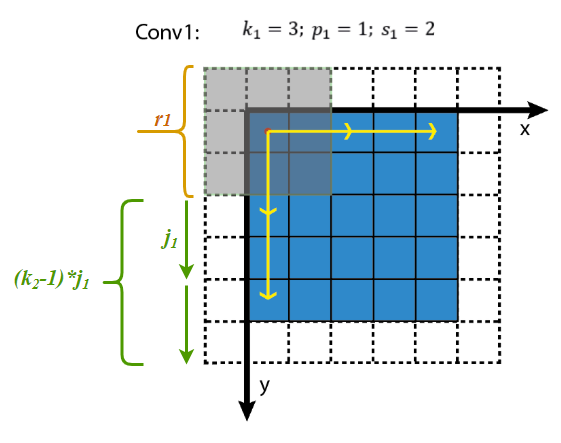
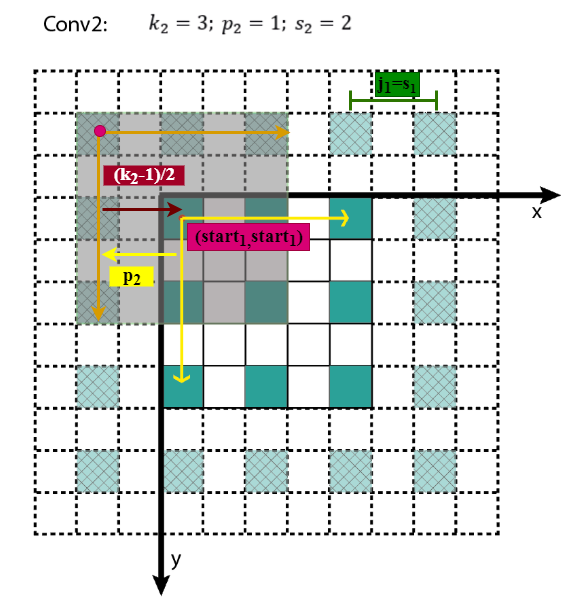
感受野大小
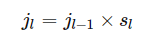
感受野中心

小结
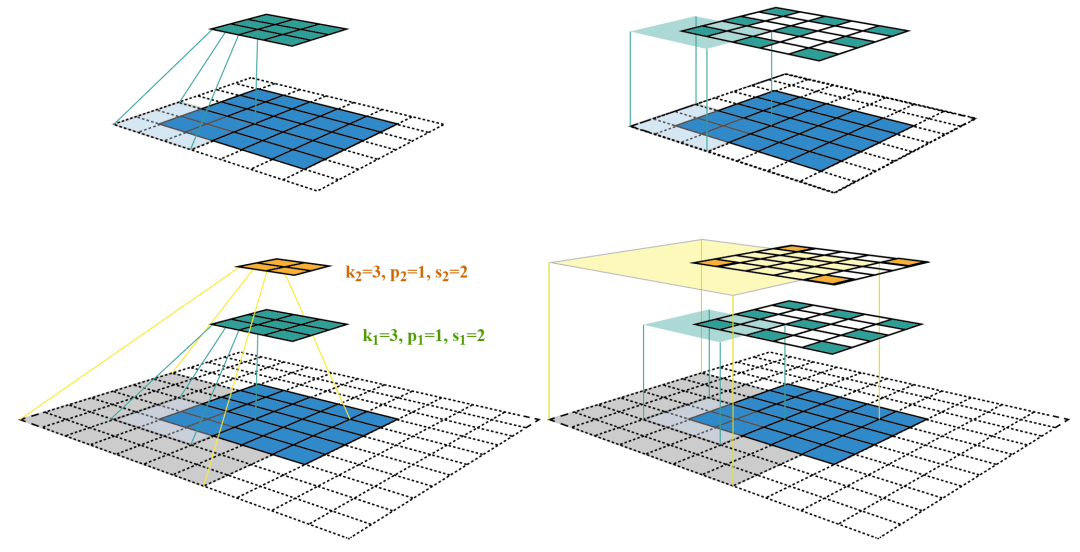
由上面的递推公式,就可以从前向后逐层计算感受野了,代码可参见computeReceptiveField.py,在线可视化计算可参见Receptive Field Calculator。
参考资料
推荐阅读
评论