
突破!五国科学家打造「鱼鳍」结构的脚,让机器人拥有更好抓地力
大数据文摘转载自机器人大讲堂
你知道Fin Ray Effect(鳍条效应)吗?
1997年,德国仿生学家LeifKniese去挪威度假,在一次钓鱼活动中,他发现如果用手指向一侧推动鱼鳍,鱼鳍不是沿着推力方向弯曲,而是向施加力的反方向弯曲。
结构形式长这样:
之后的二十多年,许多仿生机器人都使用了这种结构,可以在各种流体环境中“如鱼得水”,还有科学家将其应用在机器人夹持器中,以提升柔顺抓取的能力。

而现在,这项技术取得了最新突破! 来自五个国家的科学家仅通过调整横向骨架的角度,将该结构应用在机器人的脚上,大大的改善了机器人“手”和“脚”的抓取或抓地性能!
从鱼到昆虫的启发
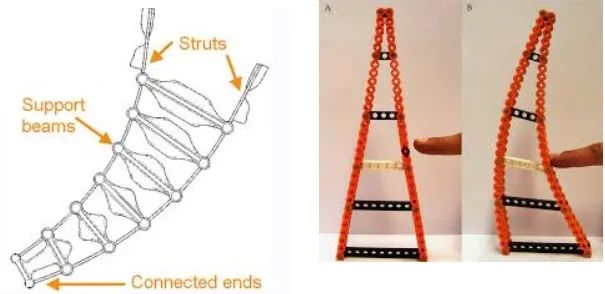
由Fin Ray Effect产生的鱼鳍结构主要由两个一端固定在一起的纵向边缘纤维骨架,和位于两主骨架间的小横向骨架组成,该结构简单、重量轻并且强度大。

在科技发达的今天,要怎样再创新鱼鳍结构,让它发挥更多的作用呢?
再头脑风暴一下,如果把鱼鳍结构放在陆地上,让它变成机器人的脚。

这项研究的通讯作者,生物机器人学教授Manoonpong说:“昆虫使用柔顺的脚‘抓住或附着’到表面上,并具有一定的附着角度。以前的工作已经研究过改变夹具的角度,但没有人对鱼鳍结构内不同的横梁角度的影响进行过详细的调查。”
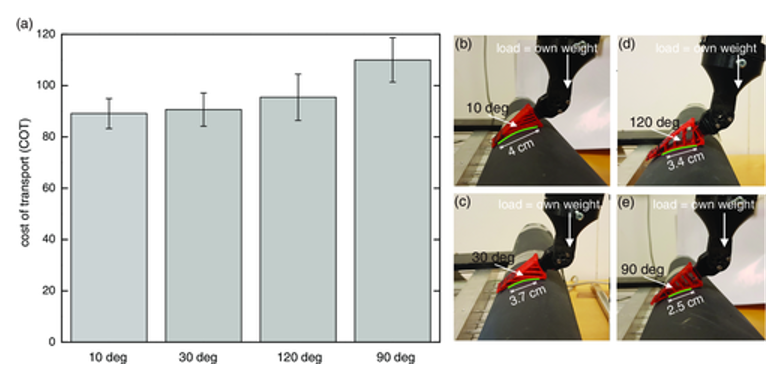
鱼鳍结构内的横向骨架通常为90度,研究人员将其改变为10度、30度、120度,并研究不同角度会对其应力及变形能力的影响。
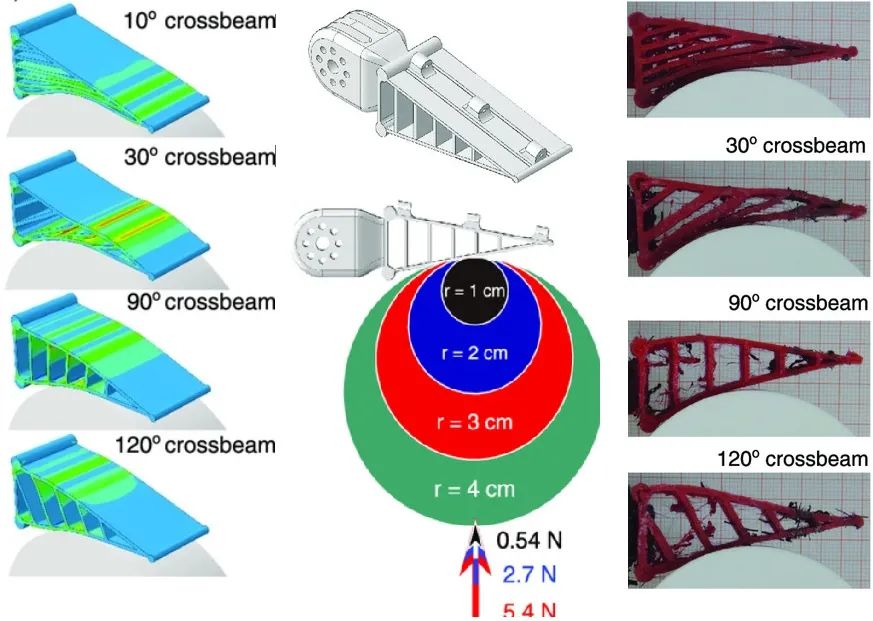
更改了衡量角度的鱼鳍结构会增大与圆筒之间的接触面积,其中,10度、30度的灵活性最好,而30度的应力表现最高。

因此,只需将Fin Ray横梁的角度从90度更改为更小的角度,就可以更轻松地围绕物体弯曲,从而提供更强大的支撑,所需的力更小,运动也更节能。这是因为90度横梁更坚固,但通过改变它们的角度,使它们弯曲所需的力更小。
在圆形管道上“走钢丝”如履平地
机器人拥有这样一双脚后,表现如何呢?
研究人员将鱼鳍结构的脚安装在Kniese六足机器人上,让它在两根圆形管道上走钢丝,并将其与传统的机器人脚对比,带有10度横梁脚部设计可以显著增加脚与管道上的接触面积,有点像“抓”着管道走,又快又稳。
在沙砾岩石表面行走也很轻松,新的脚使它能够“抓住”石头,使行走变得轻松。Manoonpong说:“如果你使用传统的机器人脚,这完全不可能。”
或将改变机器人抓手行业选择
这可能也会改变机器人抓手的行业选择。
将三角形横梁的角度从90度变小,让其更容易弯曲,这意味着使用更少的力或能量。
Manoonpong说:“这意味着我们最多可以节省大约20%的机器人能源,并且采取更温和的方法。我们可以使用机器人抓手的抓取机制它可以处理非常精致和易碎的物品,例如食物,并且施加的力或能量要少得多。它可能会对整个行业制造机器人抓手的方式产生影响。”
该成果发表在期刊《Advanced Intelligent Systems》上。目前,这项研究是基于软材料制成的,灵活性强但还不够坚固;未来,团队计划制造一种不仅能弯曲和抓握,而且足够坚固以应对任何环境的“鱼鳍”。
参考链接:
