
乐动ld06激光雷达sdk改bug记录分享
前言:
工作中,有使用过乐动ld06款激光雷达,此款雷达将常规雷达的转动的电机部分内置于自己的保护罩内,减少了雷达本身转动积灰等其他外界影响,探测半径是12m,是一款不错的雷达。
不过今天的主要内容不是介绍该雷达的性能,而是分享我在使用该雷达过程中,在进行项目开发中,发现一个在官方SDK中隐藏的问题,这个问题,在使用过程中,导致了进程的崩溃。
terminate called after throwing an instance of 'std::bad_alloc'
what(): std::bad_alloc
[laser-2] process has died [pid 2323, exit code -6]
作者:良知犹存
转载授权以及围观:欢迎关注微信公众号:羽林君
或者添加作者个人微信:become_me
ld06介绍:
下面是官方对这款雷达的介绍:

LD06 主要由激光测距核心,无线传电单元,无线通讯单元,角度测量单元、电机驱动单元和机械外壳组成。LD06 测距核心采用 DTOF 技术,可进行每秒 4500 次的测距。每次测距时,LD06 朝前发
射出红外激光,激光遇到目标物体后被反射到单光子接收单元。由此,我们获取到了激光的发
出时间和单光子接收单元收到激光的时间,两者的时间差即光的飞行时间,飞行时间再结合光
速即可解算出距离。
情况介绍:
最近使用乐动雷达时候,进行了一个上电下电读取数据的疲劳测试,经过脚本频繁的执行后,代码出现了崩溃。
最后面检查发现是一处浮点计算转换导致内存分配溢出的问题,而问题出现部分是官方包的计算没有做一些数据健壮的判断,最终导致了崩溃。
上面是代码原理,而从使用场景分析的话,出现这个问题的原因是,我们在进行机器断电再次上电时候,激光发生器有数据可以获得,但是雷达的电机没有转起来,这个时候计算的角度步长大小为一个异常值。
bug出现
代码在运行中,使用脚本进行改设备的有规律的上下电操作之后,出现了进程死掉的log展示
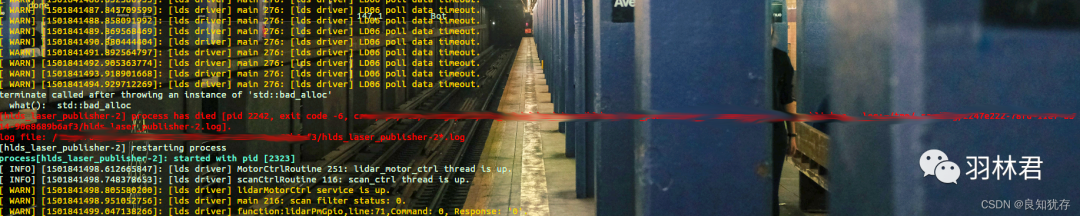
出现了此问题,第一时间是看log,但是log中没有什么有用的信息,所以我开始了gdb调试coredump文件
gdb分析
gdb exec coredump
展开之后使用bt命令就明显看到了内存溢出的问题

看到第 16 帧可能为异常发生的地方
(gdb) f 16
#16 LiPkg::ToLaserscan (this=this@entry=0x55679e90b0, src=...) at /usr/src/debug/ld06-driver/git-r0/git/sdk/src/lipkg.cpp:239
239 in /usr/src/debug/ld06-driver/git-r0/git/sdk/src/lipkg.cpp
(gdb) info locals
angle_increment =
beam_size = 4294967295
使用info locals之后看到此处函数里面beam_size为异常值

这里面我们看到beam_size算到了4294967295这样的一个值,这个值也是一个特殊值,42亿,是u32的最大值。
此外我们还在堆栈信息里面看到,改变量传入构造了一个vector,其中__n是很大的一个值
0x00000055595e66e4 in std::vector<float, std::allocator<float> >::assign (__val=@0x7f8e189790: nan(0x400000), __n=4294967295, this=0x55679e9270) at /usr/include/c++/9.1.0/bits/stl_vector.h:746
所以我们打开相应的文件vi usr/include/c++/9.1.0/bits/stl_vector.h +746
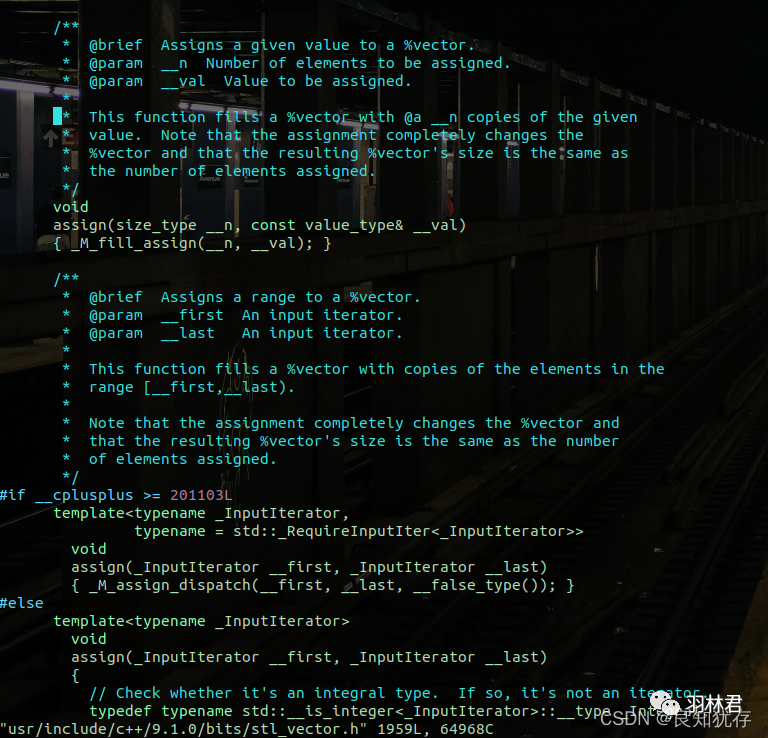
经过查看,我们发现__n 就是vector元素的计数,到这里,我们就明白了,是beam_size计算出错,导致的后面vector使用撑爆了。
打开执行的sdk源码,我们查看一下beam_size是怎么计算和使用的
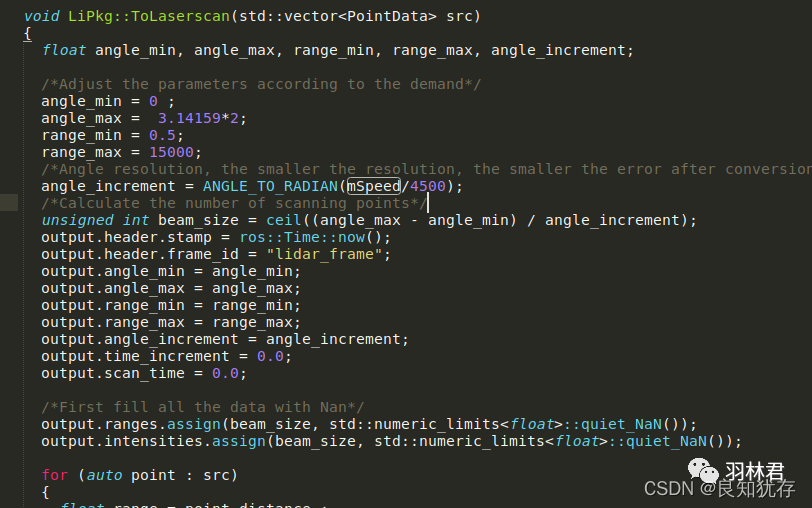
我们看到 beam_size 为unsigned int,而计算它的数据都是float类型,而赋值的时候beam_size也没有用安全转换函数,那么我们基本可以肯定这应该是一次float类型转换的问题,那么看看数据到底是怎么算过来的呢。由于gdb调试的信息还是不够,所以我在下面又增加了log进行辅助分析。
增加log分析
在代码里面我增加了如下log打印
unsigned int beam_size = ceil((angle_max - angle_min) / angle_increment);
LOG_INFO("[lds driver] %s %d: beam_size:%d %f %f %f.", __FUNCTION__, __LINE__,beam_size,angle_max,angle_min,angle_increment);

经过又一次执行崩溃之后,我们终于捕获到了它产生瞬间该函数里面的数据
[ WARN] [1501842255.254595539]: [lds driver] main 276: [lds driver] LD06 poll data timeout.
[ WARN] [1501842256.264604807]: [lds driver] main 276: [lds driver] LD06 poll data timeout.
[ INFO] [1501842257.042441093]: [lds driver] ToLaserscan 228: beam_size:-1 6.283180 0.000000 0.000000.
terminate called after throwing an instance of 'std::bad_alloc'
what(): std::bad_alloc
就是上面,我们看到这个时候 angle_increment 为0,但是实际上浮点不一定为0.000,而是后面可能有有一个小数没有表示出来,实际该浮点数可能为 0.000000000000001,而上面log可以看到,在打印beam_size之前,雷达处于无法读取数据的时候,为下电状态。下一瞬间可以读取数据,但是此时angle_increment计算为0.000000,计算angle_increment的电机实际速度应为为极小值,简单说应该是电机没有动作的起来,速度为0,导致计算beam_size转换之后变成一个极大值。
到这里我们就应该明白是如何造成的这个问题了。这个时候怎么修改呢?
bug修复
改bug的方法有很多种,哪一种好,能用就好。这里我想到的就是把数据使用之前,进行安全检查,转化变量的时候进行static_cast修饰。
增加代码如下:
/*Calculate the number of scanning points*/
if(mSpeed > 0)
{
unsigned int beam_size = static_cast(ceil((angle_max - angle_min) / angle_increment));
...
}
显示效果如截图所示:

结语
这就是我使用乐动ld06型号雷达sdk的一些问题解决分享,这里面是一个完整工作解决bug的流程介绍,希望可以给大家一些知识补充。如果大家有更好的想法和需求,也欢迎大家加我好友交流分享哈。
作者:良知犹存,白天努力工作,晚上原创公号号主。公众号内容除了技术还有些人生感悟,一个认真输出内容的职场老司机,也是一个技术之外丰富生活的人,摄影、音乐 and 篮球。关注我,与我一起同行。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
推荐阅读
【3】CPU中的程序是怎么运行起来的 必读
本公众号全部原创干货已整理成一个目录,回复[ 资源 ]即可获得。