
什么是RAC定位?
笔者因为工作原因,接触到一种叫做RAC的定位产品,该定位产品不同于一般的定位模组,它产品外表看起来很像一个GPS定位天线,通过一个4芯线缆(供电+串口通信)直接和其它MCU/CPU 相连接,输出定位信息。以下是该公司的两款终端产品:


该产品牛逼的地方在于,它可以不依赖于任何差分站(地基或者星基),就可以实现优于1米的定位精度,带来的好处是:
相比一般的普通定位模组,精度大幅度提高; 相比RTK高精度定位,成本会大幅度下降(RTK本身模组价格高且需要支付差分服务费)。
它是如何做到这一点的呢?它用了一种叫做RAC的定位技术,RAC是Realtime Array Calibration的缩写,译为“实时阵列校准”,它是通过创新的天线阵列设计方案和软件算法,使得水平定位误差大大减小,大大提高了定位的精度和稳定性。
简单来说就是该产品里有3个普通的Ublox定位模组+3个天线阵列,3个天线摆成一个三角形形状,理论上这三个模组的定位结果和预知的三角形相对位置是一致的,但是由于实际中存在误差并不会完全一致,这时通过软件算法,不断的修正定位结果,逐渐减小误差。
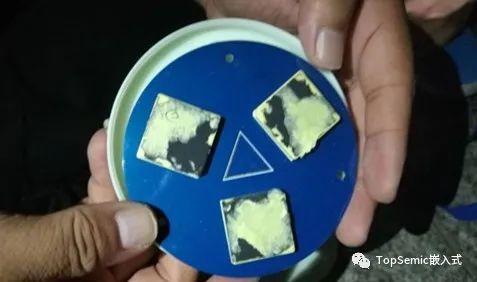

(以上图片来源于网上的拆机图片)
具体实现细节,那是人家的核心技术,咱就搞不懂了,毕竟该公司创始人20年前就在欧洲研究GPS了,我那会还在上小学呢,所以里面肯定是有很多黑科技的。
说了这么多,下面咱们实测看看效果吧,先测测静态单点定位效果,我将它放在了楼下地面的一个小栏杆上,静态观测了5分钟,这两天外面忒冷了...

实际定位效果如下:
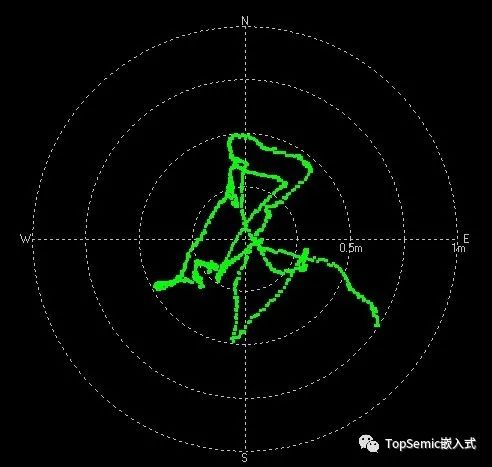
我们可以看到误差基本上都在50cm以内,当然这是和自己的定位平均值相比,是相对精度。绝对精度就得找那种几十万的高精度定位设备比了,我也想比比看,可是条件不允许啊,据说和他们相比误差在几十个cm左右。
单从静态测试就可以明显的看到,相比一般的普通定位模组,它的相对精度明显要高,不过确实比不上RTK,因为之前测过Ublox的F9P,空旷环境静止时可以到几个cm级别精度。
动态情况下,它的优势在于整个轨迹的连续性,对遮挡环境更加不敏感,比如高楼处、立交桥下等环境。该产品真正的优势其实体现在动态精度上,车载通常更关注动态精度。
他们的产品已经广泛应用于低速无人车、公交车等应用中。其实对很多应用来说,分米级别定位已经足够了,所以还是有很多的应用场景的。
总之,我猜很多人应该没有听过这个东西,所以在这里给大家分享一下,让大家在选用定位终端时有更多选择和比较。
