
第44回 | 进程的阻塞与唤醒
新读者看这里,老读者直接跳过。
本系列会以一个读小说的心态,从开机启动后的代码执行顺序,带着大家阅读和赏析 Linux 0.11 全部核心代码,了解操作系统的技术细节和设计思想。
本系列的 GitHub 地址如下,希望给个 star 以示鼓励(文末阅读原文可直接跳转,也可以将下面的链接复制到浏览器里打开)
https://github.com/sunym1993/flash-linux0.11-talk
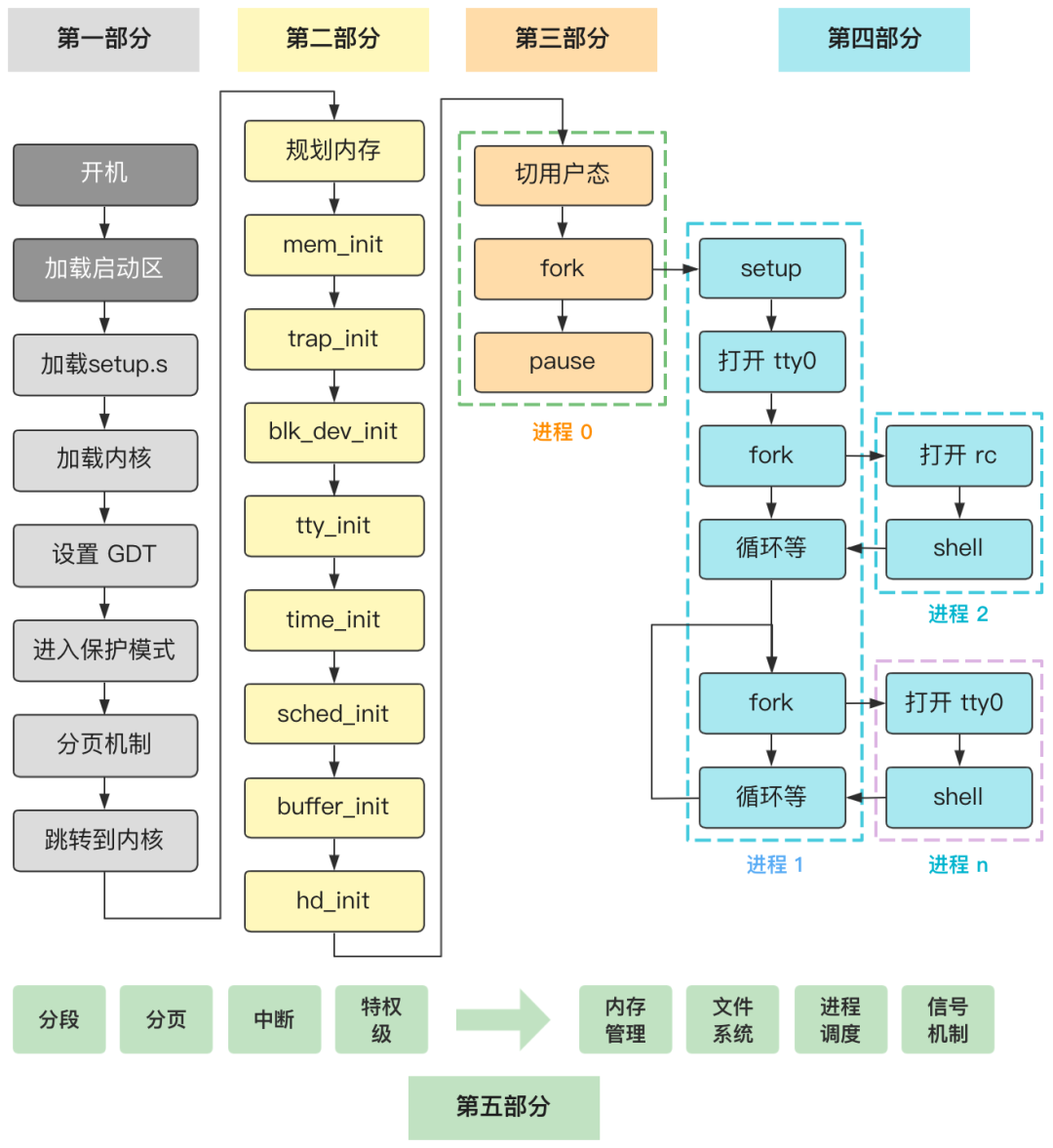
本回的内容属于第五部分。
你会跟着我一起,看着一个操作系统从啥都没有开始,一步一步最终实现它复杂又精巧的设计,读完这个系列后希望你能发出感叹,原来操作系统源码就是这破玩意。
以下是已发布文章的列表,详细了解本系列可以先从开篇词看起。
第一部分 进入内核前的苦力活
第二部分 大战前期的初始化工作
第三部分 一个新进程的诞生
第44回 | 进程的阻塞与唤醒(本文)
------- 正文开始 -------
新建一个非常简单的 info.txt 文件。
name:flash
age:28
language:java在命令行输入一条十分简单的命令。
[root@linux0.11] cat info.txt | wc -l
3
这条命令的意思是读取刚刚的 info.txt 文件,输出它的行数。
在上一回中,我们分析了一下 shell 进程是如何读取你的命令的,流程如下图。

当然,这里的 sleep_on 和 wake_up 是进程的阻塞与唤醒机制的实现,我们没有展开讲解。
那我们今天,就详细看看这块的逻辑。
首先,表示进程的数据结构是 task_struct,其中有一个 state 字段表示进程的状态,它在 Linux 0.11 里有五种枚举值。
// shed.h
#define TASK_RUNNING 0 // 运行态
#define TASK_INTERRUPTIBLE 1 // 可中断等待状态。
#define TASK_UNINTERRUPTIBLE 2 // 不可中断等待状态
#define TASK_ZOMBIE 3 // 僵死状态
#define TASK_STOPPED 4 // 停止
当进程首次被创建时,也就是 fork 函数执行后,它的初始状态是 0,也就是运行态。
// system_call.s
_sys_fork:
...
call _copy_process
...
// fork.c
int copy_process(...) {
...
p->state = TASK_RUNNING;
...
}
只有当处于运行态的进程,才会被调度机制选中,送入 CPU 开始执行。
// sched.c
void schedule (void) {
...
if ((*p)->state == TASK_RUNNING && (*p)->counter > c) {
...
next = i;
}
...
switch_to (next);
}
以上我简单列出了关键代码,基本可以描绘进程调度的大体框架了,不熟悉的朋友还请回顾下 第23回 | 如果让你来设计进程调度。
所以,使得一个进程阻塞的方法非常简单,并不需要什么魔法,只需要将其 state 字段,变成非 TASK_RUNNING 也就是非运行态,即可让它暂时不被 CPU 调度,也就达到了阻塞的效果。
同样,唤醒也非常简单,就是再将对应进程的 state 字段变成 TASK_RUNNING 即可。
Linux 0.11 中的阻塞与唤醒,就是 sleep_on 和 wake_up 函数。
其中 sleep_on 函数将 state 变为 TASK_UNINTERRUPTIBLE。
// sched.c
void sleep_on (struct task_struct **p) {
struct task_struct *tmp;
...
tmp = *p;
*p = current;
current->state = TASK_UNINTERRUPTIBLE;
schedule();
if (tmp)
tmp->state = 0;
}
而 wake_up 函数将 state 变回为 TASK_RUNNING,也就是 0。
// sched.c
void wake_up (struct task_struct **p) {
(**p).state = 0;
}
是不是非常简单?
当然 sleep_on 函数除了改变 state 状态之外,还有些难理解的操作,我们先试着来分析一下。
当首次调用 sleep_on 函数时,比如 tty_read 在 secondary 队列为空时调用 sleep_on,传入的 *p 为 NULL,因为此时还没有等待 secondary 这个队列的任务。
struct tty_queue {
...
struct task_struct * proc_list;
};
struct tty_struct {
...
struct tty_queue secondary;
};
int tty_read(unsigned channel, char * buf, int nr) {
...
sleep_if_empty(&tty->secondary);
...
}
static void sleep_if_empty(struct tty_queue * queue) {
...
interruptible_sleep_on(&queue->proc_list);
...
}
通过 tmp = *p 和 *p = current 两个赋值操作,此时:
tmp = NULL
*p = 当前任务
同时也使得 proc_list 指向了当前任务的 task_struct。

当有另一个进程调用了 tty_read 读取了同一个 tty 的数据时,就需要再次 sleep_on,此时携带的 *p 就是一个指向了之前的"当前任务"的结构体。
那么经过 tmp = *p 和 *p = current 两个赋值操作后,会变成这个样子。
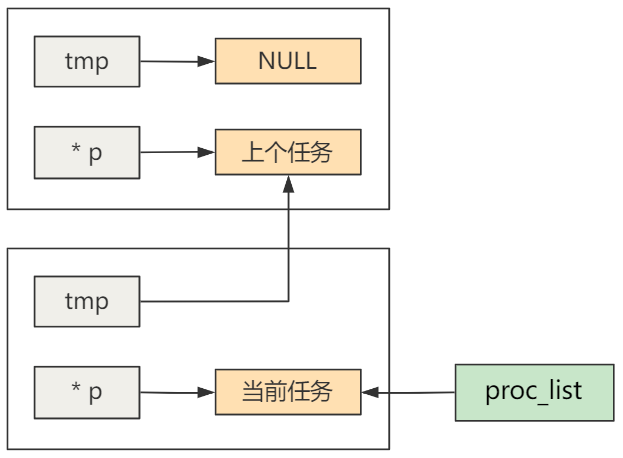
也就是说,通过每一个当前任务所在的代码块中的 tmp 变量,总能找到上一个正在同样等待一个资源的进程,因此也就形成了一个链表。
那么,当某进程调用了 wake_up 函数唤醒 proc_list 上指向的第一个任务时,改任务变会在 sleep_on 函数执行完 schedule() 后被唤醒并执行下面的代码,把 tmp 指针指向的上一个任务也同样唤醒。
// sched.c
void sleep_on (struct task_struct **p) {
struct task_struct *tmp;
...
tmp = *p;
*p = current;
current->state = TASK_UNINTERRUPTIBLE;
schedule();
if (tmp)
tmp->state = 0;
}
永远记住,唤醒其实就是把 state 变成 0 而已。
而上一个进程唤醒后,和这个被唤醒的进程一样,也会走过它自己的 sleep_on 函数的后半段,把它的上一个进程,也就是上上一个进程唤醒。
那么上上一个进程,又会唤醒上上上一个进程,上上上一个进程,又会...
看懂了没,通过一个 wake_up 函数,以及上述这种 tmp 变量的巧妙设计,我们就能制造出唤醒的一连串连锁反应。
当然,唤醒后谁能优先抢到资源,那就得看调度的时机以及调度的机制了,对我们来说相当于听天由命了。
OK,现在我们的 shell 进程,通过 read 函数,中间经过了层层封装,以及后面经过了阻塞与唤醒这一番折腾后,终于把键盘输入的字符们,成功由 tty 中的 secondary 队列,读取并存放与 buf 指向的内存地址处。
[root@linux0.11] cat info.txt | wc -l
接下来,就该解析并执行这条命令了。
// xv6-public sh.c
int main(void) {
static char buf[100];
// 读取命令
while(getcmd(buf, sizeof(buf)) >= 0){
// 创建新进程
if(fork() == 0)
// 执行命令
runcmd(parsecmd(buf));
// 等待进程退出
wait();
}
}
也就是上述函数中的 runcmd 命令。
欲知后事如何,且听下回分解。
------- 关于本系列 -------
本系列的开篇词看这,开篇词
本系列的番外故事看这,让我们一起来写本书?也可以直接无脑加入星球,共同参与这场旅行。
最后,本系列完全免费,希望大家能多多传播给同样喜欢的人,同时给我的 GitHub 项目点个 star,就在阅读原文处,这些就足够让我坚持写下去了!我们下回见。