
自动驾驶中的车道线跟踪技术
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自:AI算法与图像处理
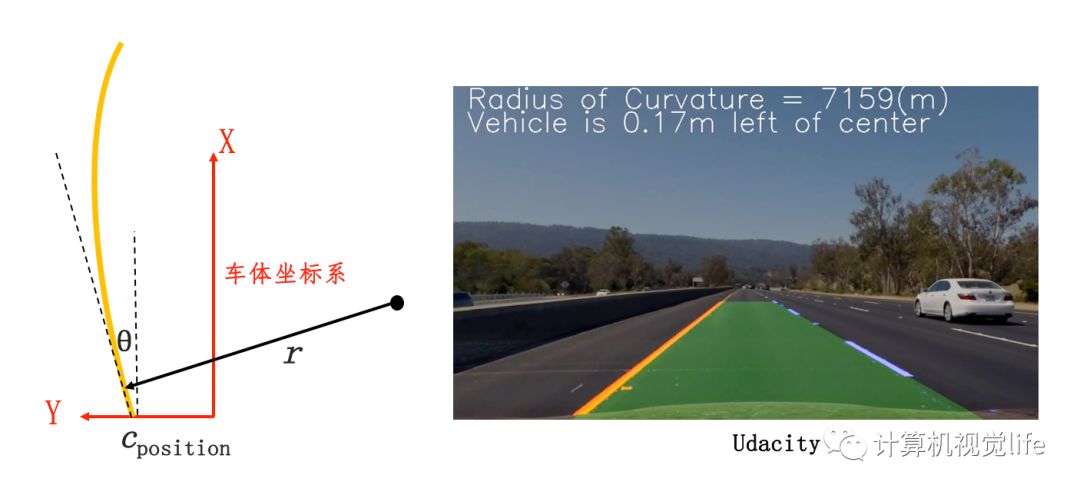
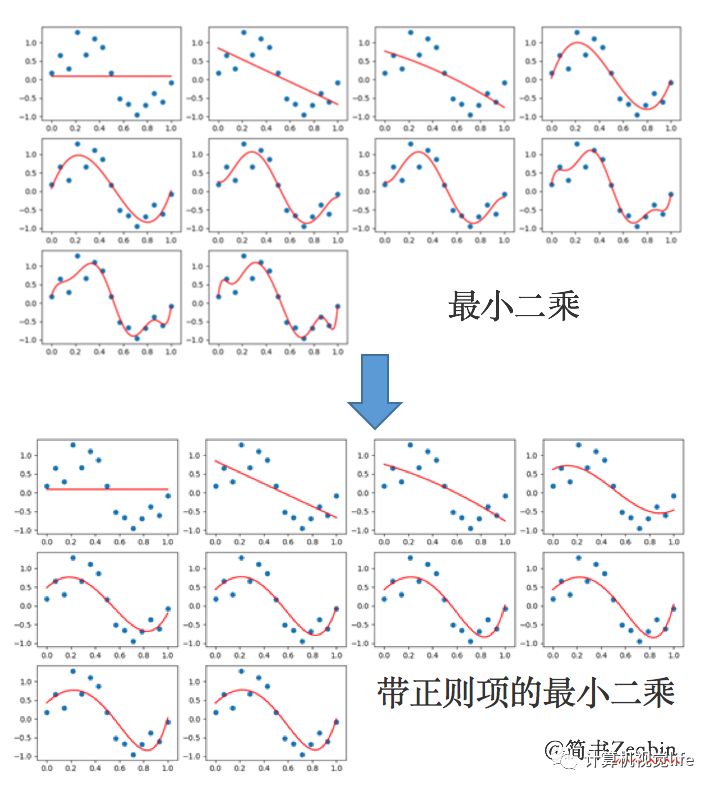
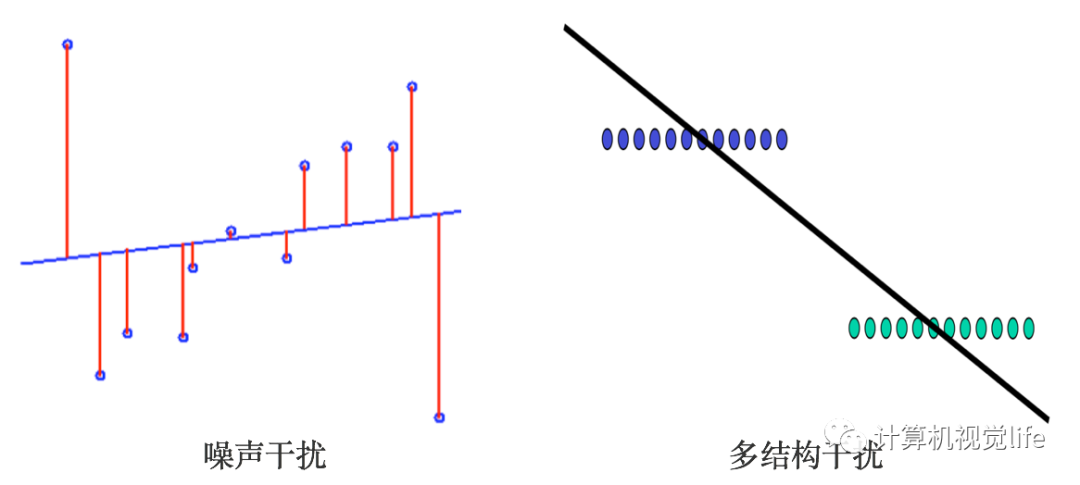
本文讨论的重点跟踪算法如何应用在车道线应用中,即从得到车道线检测结果开始,到连续稳定地车道线跟踪的过程。包含车道线模型、鲁棒的拟合方法和跟踪。



比较常用的跟踪方法之一是Kalman滤波及其变形,这种方法对于比较理想的车道线(中断、遮挡或模糊等比较少)有较好的跟踪效果。Kalman车道线跟踪的过程如下:
(增加)刚开始增加车道线状态量向量作为初始化。之后,只要本时刻有新检测结果输入,而上一帧没有对应的车道线信息,即把新检测到的车道线状态量为赋给,即增加一条车道线。此处检测量由测量方程决定,由于测量系统参数矩阵为单位矩阵,计检测到的就是,因此忽略测量方程。(预测)首先需要通过上一时刻车辆状态信息(车速和车辆角速度)和上一时刻状态量预测本时刻状态量,即状态方程为,其中是和车速有关的矩阵,是和角速度有关的矩阵,合起来代表以上一时刻车辆状态为条件,对本时刻状态量的预测。 (更新)如果本时刻某条预测好的车道线和本时刻检测到的车道线满足某种匹配规则,即可认为是同一条车道线,需要用Kalman增益综合利用预测和检测的信息来更新车道线状态。具体做法:系统协方差矩阵更新为,通常测试场景一定,假设系统噪声协方差矩阵为一个固定的对角方阵。随后计算 此处测量协方差矩阵为对角方阵,可以根据当前检测结果的置信度而改变。最后得到更新的本时刻状态为 (删除)如果某条车道线一直是预测得出的,并没有匹配上新检测的车道线进行更新,则当前时刻如果预测次数大于某一寿命阈值后,就删除。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论