图解RepVGG
极市导读
本文介绍了一种简单强力的VGG式网络结构,仅包含3x3卷积,BN层,Relu激活函数,通过重参数化提高其性能,准确率直逼其他SOTA网络(如RegNet和EfficientNet)。推理的时候因为可以通过融合分支,将模型变为单路结构,推理时间也能显著降低。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
介绍
早期卷积网络结构主要是手工设计,通过不断堆叠卷积层以取得更好的效果(如AlexNet和VGG),而近些年来,为了提高网络性能,研究者基于NAS和手工也衍生出了很多复杂的结构,如:
基于多分支结构设计,如残差网络add,Inception系列中的concat操作。多分支结构带来的问题是难以自定义,增加推理时间,增加显存消耗(因为需要保存各个分支的结果,直到add操作后,显存才会减少,后续会分析) 一些网络结构组件,比如为轻量化网络设计的DepthwiseConv和ShuffleNet中的channel shuffle。这些操作会提高访存消耗,FLOPS看起来很低,但并不能反应实际推理速度。
新颖的组件固然能提升模型精度,但是复杂的结构会影响推理速度。因此直到现在,VGG和ResNet仍然被广泛应用。当然,其中一个巨大的挑战是如何提升VGG这种plain结构的精度。
选择VGG式网络的三个原因
速度快
现有的计算库(如CuDNN,Intel MKL)和硬件针对3x3卷积有深度的优化,相比其他卷积核,3x3卷积计算密度更高,更加有效。
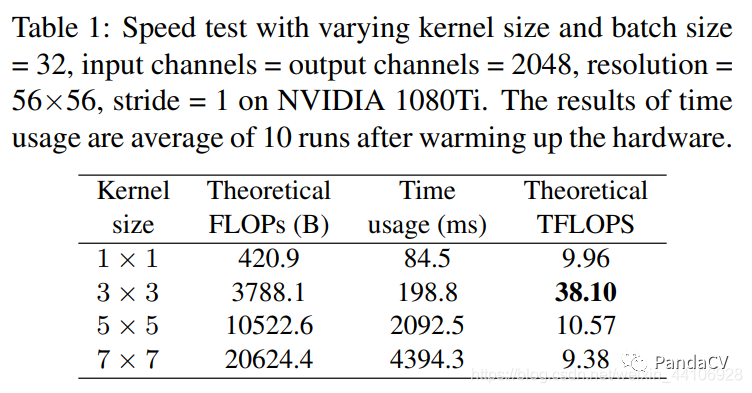
比如VGG16的FLOPS比EfficientNetB3大8倍,但是VGG使用的都是3x3卷积,计算密度高,EfficientNet为了节约计算量和提高性能引入了DepthwiseConv,SE注意力,但是最终运行速度RepVGG要快1.8倍
节省显存
前面提过多分支结构很消耗显存的,因为各个分支的结果需要保存,直到最后一步融合(比如add),才能把各分支显存释放掉
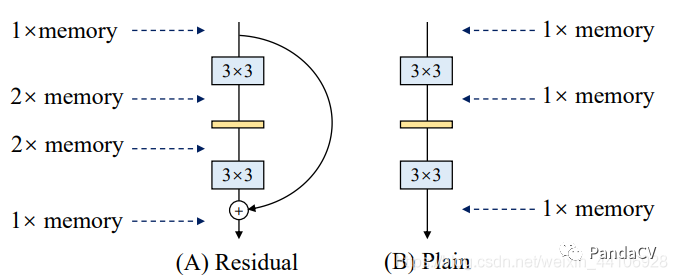
以残差块结构为例子,它有2个分支,其中主分支经过卷积层,假设前后张量维度相同,我们认为是一份显存消耗,另外一个旁路分支需要保存初始的输入结果,同样也是一份显存消耗,这样在运行的时候是占用了两份显存,直到最后一步将两个分支结果Add,显存才恢复成一份。而Plain结构只有一个主分支,所以其显存占用一直是一份。
灵活
多分支结构会引入网络结构的约束,比如Resnet的残差结构要求输入和卷积出来的张量维度要一致(这样才能相加),这种约束导致网络不易延伸拓展,也一定程度限制了通道剪枝。对应的单路结构就比较友好,剪枝后也能得到很好的加速比。
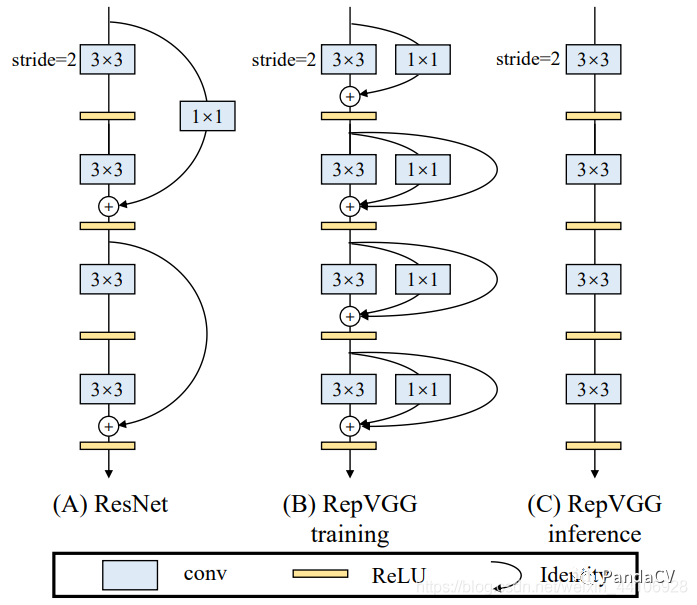
提升VGG性能——从多分支开始
VGG这种单路网络的缺点就是性能不好,72%的准确率放在当下来看已经是很落后了。受Resnet的残差结构启发,我们引入了残差分支和1x1卷积分支,为了后续重参数化成单路结构,我们调整了分支放置的位置,没有进行跨层连接,而是直接连了过去。
相当于一个Block内所作的计算为
后续的消融实验了证明了这两个分支对性能提升的重要性
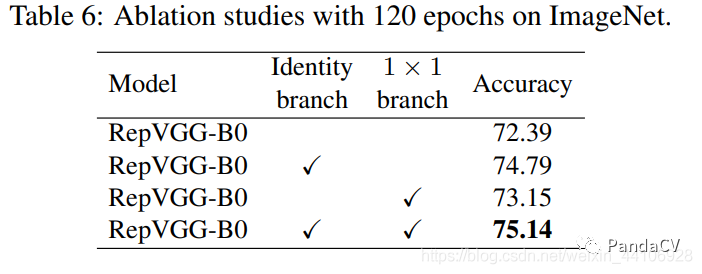
其中Idendity分支(即残差连接)提升尤为明显,1x1卷积分支也能提供近一个点的贡献。两个分支合并能贡献3个点的提升。
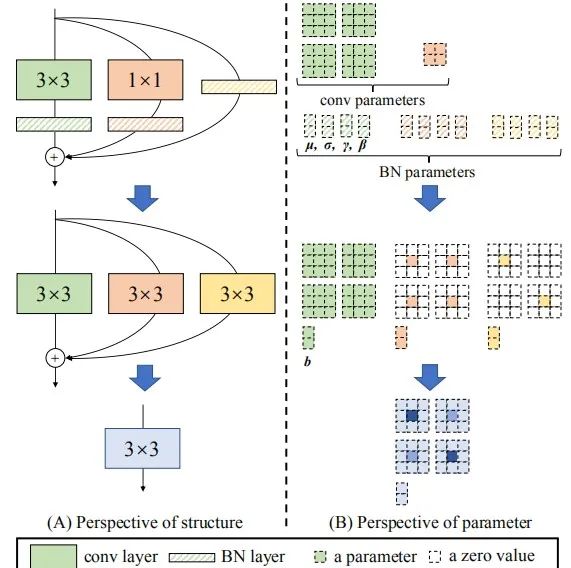
提升推理速度——多分支融合技术
卷积+BN 融合
RepVGG里面大量使用卷积层和BN层,这里首先将两者合并起来,能提高推理速度卷积层公式为而BN层公式为
然后我们将卷积层结果带入到BN公式中
进一步化简为
看到这个公式是不是很熟悉?这其实就是一个卷积层,只不过权重考虑了BN的参数 我们令
最终融合的结果就是
相关代码
def _fuse_bn_tensor(self, branch):if branch is None:return 0, 0if isinstance(branch, nn.Sequential):kernel = branch.conv.weightrunning_mean = branch.bn.running_meanrunning_var = branch.bn.running_vargamma = branch.bn.weightbeta = branch.bn.biaseps = branch.bn.epselse:...std = (running_var + eps).sqrt()t = (gamma / std).reshape(-1, 1, 1, 1)return kernel * t, beta - running_mean * gamma / std
这里跟公式不一样的是融合bias的,RepVGG中卷积层没有使用Bias,我们把前面公式推导中的b去掉即可。
卷积分支融合
3x3卷积和1x1卷积融合
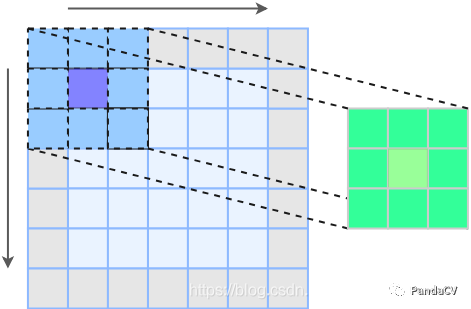
为了方便理解,这里仅考虑stride=1且卷积前后特征图大小不变的情况首先我们看下1x1卷积
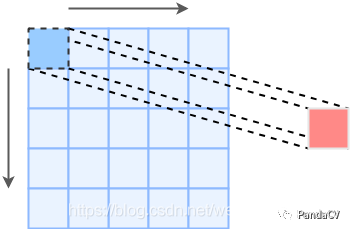
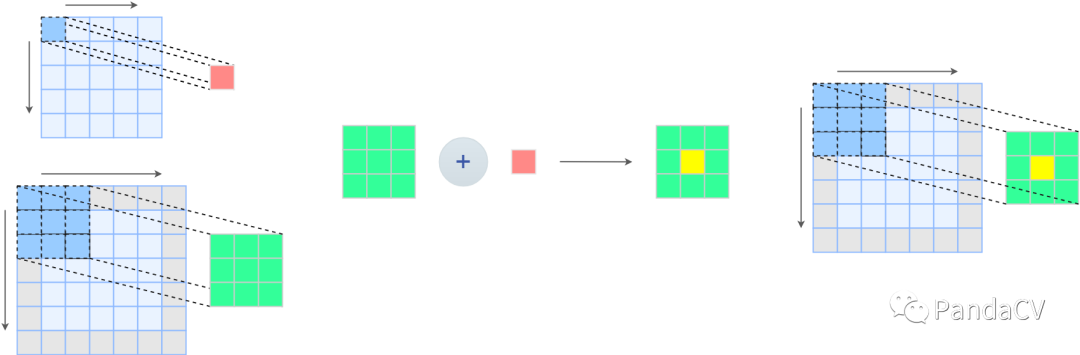
这里1x1卷积不需要padding,就能保证特征图大小前后一致,下面我们再看看3x3卷积
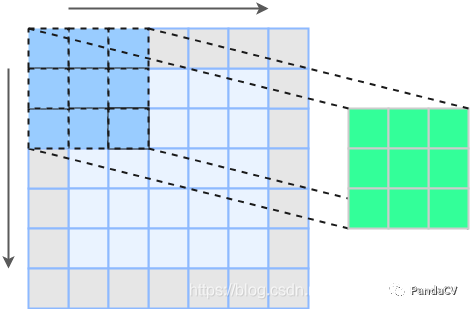
为了保证特征图大小不变,我们需要在原特征图上padding一圈(图中灰色部分表示padding)我们观察下3x3卷积核中间的那个核,会惊奇的发现它卷积的路径就是前面1x1卷积的路径
一个很自然的想法是,把1x1卷积核加在3x3卷积核中间,就能完成卷积分支融合下面是融合之后的示例图
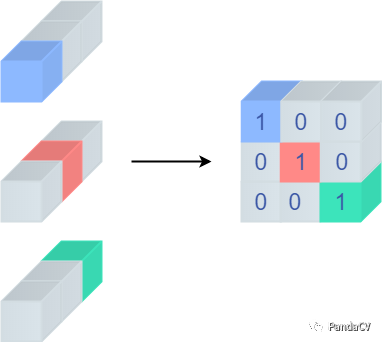
identity分支等效特殊权重卷积层
现在我们还遗留了一个identity分支,说白了就是Elementwise相加,每个通道中每个元素对应相加。那么现在的问题是将identity分支用一个卷积层表示,这样才有可能融合。identity前后值不变,那么我会想到是用权重等于1的卷积核,并分开通道进行卷积,即1x1的,权重固定为1的Depthwise卷积。这样相当于单独对每个通道的每个元素乘1,然后再输出来,这就是我们想要的identity操作!下面是一个示意图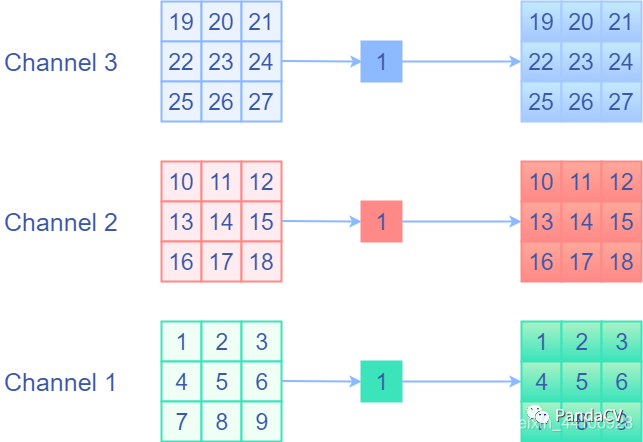 我们可以用一段代码进行验证,下面是基于oneflow框架的代码:
我们可以用一段代码进行验证,下面是基于oneflow框架的代码:
`import oneflow as flowimport oneflow.typing as tpimport numpy as np@flow.global_function()def test_identity(x: tp.Numpy.Placeholder(shape=(1, 3, 3, 3)))->tp.Numpy:in_channels = x.shape[1]out_channels = in_channelsgroups = in_channelskernel_size = 1weight = flow.get_variable(shape=(out_channels, in_channels//groups, kernel_size, kernel_size),initializer=flow.ones_initializer(),name="identity_weight")return flow.nn.conv2d(x, filters=weight, padding=(0, 0, 0, 0), strides=1, groups=groups)x = np.array([[[[1, 2, 3],[],[]],[],[],[]],[],[],[]]]]).astype(np.float32)out = test_identity(x)print("Output is: ", out)`
我们设置卷积层输入输出通道相等,分组数等于输入通道数(这样就是Depthwise卷积了),卷积核大小和步长都设置为1然后构造一组形状为(1,3,3,3)NCHW格式的数据 验证下结果
Output is: [[[[ 1. 2. 3.][][]][][][]][][][]]]]
这里我们初步达到了我们的目的,但是新的问题产生了,我们的3x3和1x1分支都不是Depthwise卷积,现在也是不能融合进去的,我们需要把Depthwise卷积以普通卷积的形式表达出来。因为普通卷积输出是将各个通道结果相加,那么自然而然想到,我们只要将当前通道对应的卷积权重设置为1,而其他通道权重设置为0,不就等价Depthwise卷积了!下面是一个示意图
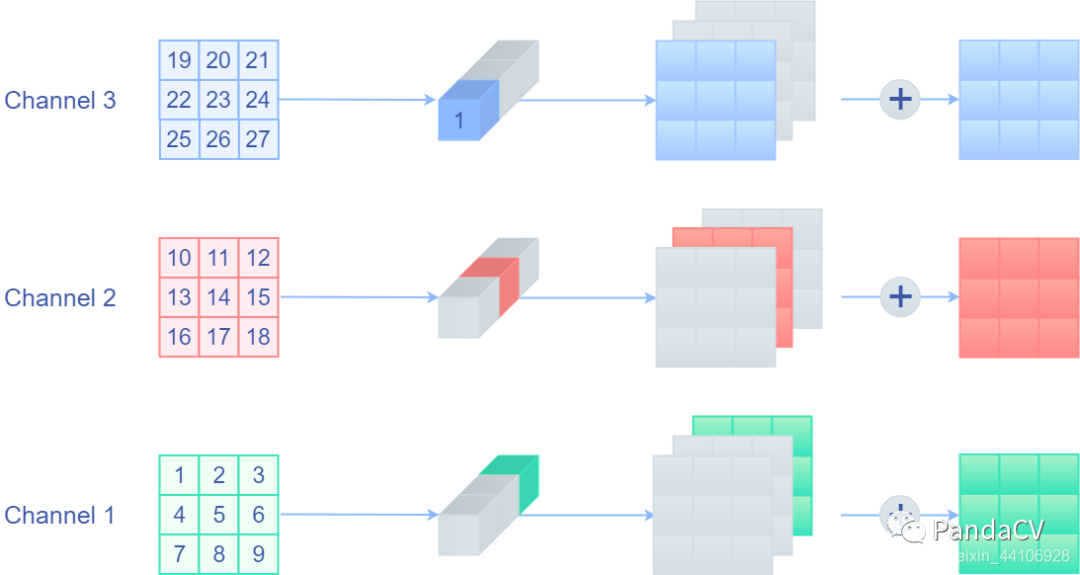
其中灰色的地方均表示0到了这里,我们也能用普通1x1卷积来等效Identity分支了,不过先别急,它还有个重要的性质,我们将卷积核都展开,会得到下面的图
很神奇的是,展开来得到的是一个单位矩阵!这个性质十分重要,划重点,等等融合分支的时候会用到。下面我们来仔细看下代码首先是将1x1卷积核padding一圈0,让他变成“3x3卷积核”
def _pad_1x1_to_3x3_tensor(self, kernel1x1):if kernel1x1 is None:return 0else:return torch.nn.functional.pad(kernel1x1, [1, 1, 1, 1])
然后是具体融合了,主要方法还是前面的 _fuse_bn_tensor
def _fuse_bn_tensor(self, branch):if branch is None:return 0, 0if isinstance(branch, nn.Sequential):# 3x3卷积和1x1卷积分支kernel = branch.conv.weightrunning_mean = branch.bn.running_meanrunning_var = branch.bn.running_vargamma = branch.bn.weightbeta = branch.bn.biaseps = branch.bn.epselse:assert isinstance(branch, nn.BatchNorm2d)if not hasattr(self, 'id_tensor'):input_dim = self.in_channels // self.groupskernel_value = np.zeros((self.in_channels, input_dim, 3, 3), dtype=np.float32)for i in range(self.in_channels):i % input_dim, 1, 1] = 1= torch.from_numpy(kernel_value).to(branch.weight.device)kernel = self.id_tensorrunning_mean = branch.running_meanrunning_var = branch.running_vargamma = branch.weightbeta = branch.biaseps = branch.epsstd = (running_var + eps).sqrt()t = (gamma / std).reshape(-1, 1, 1, 1)return kernel * t, beta - running_mean * gamma / std
因为1x1卷积被padding成了3x3卷积,所以它和3x3卷积融合BN采用的是同一套逻辑。else分支下则是Identity分支融合的逻辑,由于后续网络会引入分组,所以这里用groups计算了下卷积核对应的输入通道,然后就是一个for循环给卷积核赋值1。这里可能不太好理解,首先我们假设不分组,则 input_dim=in_channels,循环里的赋值第二个维度是i % input_dim,但是i是一个循环的变量,他是小于input_dim的,所以 i%input_dim其实就是i。用更简洁的代码就是
for i in range(self.in_channels):kernel_value[i, i, 1, 1] = 1
这里就是用到了前面推导Identity分支,其卷积核等价于单位矩阵的这个特性,对第(i, i)个元素赋值为1。后续则是将Identity分支上的BN参数给赋值过去。类似的,我们也可以推导分组的融合逻辑。最后就是将这3个分支转换的结果加在一起
def get_equivalent_kernel_bias(self):kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense) # self.rbr_dense是3x3卷积分支kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1) # self.rbr_1x1是1x1卷积分支kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity) # self.rbr_identity是Identity分支return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
至此我们就完全搞懂融合的全部原理了
实验结果
作者提出了A和B系列两种模型,其区别是卷积块堆叠设置,并设立了两个参数a,b来控制通道数
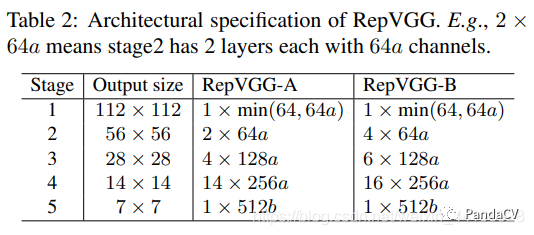
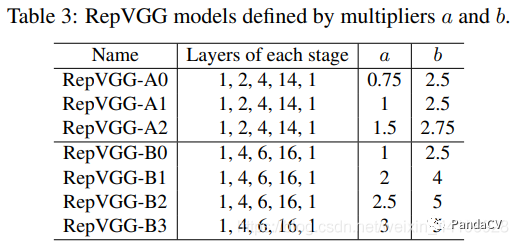
可以看到参数设置的也是很正常的数字,没有很花里胡哨的超参调整

在普通数据增广下,性能能直逼一些SOTA模型
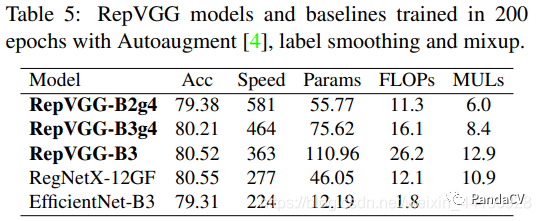
加上了AutoAugment,标签平滑,MixUp这些Trick,性能也能和RegNet,EfficientNet对齐。
总结
RepVGG在我看来真的是一个很棒的BackBone工作,它避免了花里胡哨的模块设计,NAS搜索,仅仅靠简单的手工设计和重参数化达到了SOTA结果。作者丁霄汉其实已经介绍过这篇论文 RepVGG:极简架构,SOTA性能,让VGG式模型再次伟大(https://zhuanlan.zhihu.com/p/344324470),他也是ACNet的作者,将1x3和3x1卷积核融到了3x3卷积,想必RepVGG也是这一系列工作的延申。我最近也是拿 OneFlow 框架对其进行复现,设置了以下参数
epoch 提升到160 labelsmooth 0.1 Warmup Epoch 5 Momentum 0.9
这样就可以很轻松的达到比论文稍好一点的结果
RepVGGA0 72.6 RepVGGA1 74.9 RepVGGA2 76.51 RepVGGB0 75.4
而且训练速度非常的快。RepVGGA0在四卡batchsize=256情况下,睡一觉第二天就能出结果。并且整个网络就是卷积层,BN层,Relu,十分适合部署,具体可参考 基于TensorRT量化部署RepVGG模型(https://mp.weixin.qq.com/s/9GPQrvxvxtlYYGPVIg3J0Q)。很期待作者后续的工作,近期可以关注下即将放出的ACNet2。
推荐阅读
2021-01-12
2021-02-19
2021-02-23


# CV技术社群邀请函 #
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~