
2D和3D机器视觉检测技术的优势和局限性
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
本文转自|新机器视觉

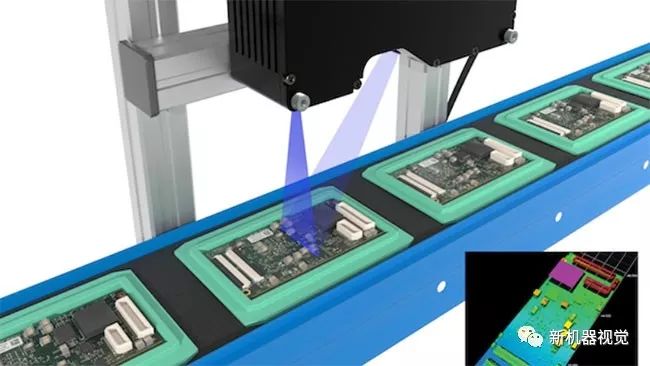
机器视觉一般由工业光源,图像采集单元,图像处理单元,图像处理软件及网络通讯装置等构成。在自动化工业质量控制和在线检测领域,2D和3D技术都具有重要的作用。如何将两者结合起来创建一个更可靠、高效的机器视觉检测系统,首先要认识两者的各自优势和局限性。
从2D视觉技术开始
2D技术起步较早,技术也相对成熟,在过去的30年中已被证明在广泛的自动化和产品质量控制过程中非常有效。
2D技术根据灰度或彩色图像中对比度的特征提供结果。 2D适用于缺失/存在检测、离散对象分析、图案对齐、条形码和光学字符识别(OCR)以及基于边缘检测的各种二维几何分析,用于拟合线条、弧线、圆形及其关系(距离,角度,交叉点等)。
模式匹配:处理零件变化的关键
2D视觉技术在很大程度上由基于轮廓的图案匹配驱动,以识别部件的位置,尺寸和方向。
技术人员可以使用2D来识别零件并创建动态适应零件位置,角度和尺寸的检测工具,从而实现零件移动的稳健测量。
今天的模式匹配处理遮挡,杂波,失真,对比度反转,重叠的部分和不均匀的照明。
无法测量形状
2D传感器不支持与形状相关的测量。 例如,2D传感器不能够测量诸如物体平面度,表面角度,部分体积,或者区分相同颜色的物体之类的特征,或者在具有接触侧的物体位置之间进行区分。
易受变量照明条件的影响
由于照明决定了边缘位置和测量精度,因此传感器视野范围内的照明变化有时会导致边缘测量误差,除非使用特定的技术来补偿这种影响。 在工厂条件下,照明变化是生产车间意外环境或现场来源的共同挑战。
有限的对比度补偿
2D传感器依赖于测量物体的对比度(边缘数据),例如,这意味着它们无法测量黑色背景上的黑色物体,或者在没有特定光照的情况下区分部分特征来暴露边缘的存在和定义。
对物体运动敏感
由于元件移动造成的误差,二维传感器需要沿光轴(Z轴)精确固定,使用尺度不变特征检测,或者使用大型远心光学元件(必须与FOV尺寸相匹配)来消除影响。
结合2D和3D技术
3D视觉通过添加描述形状的第二层数据来建立在2D的成熟功能上,这对于设计高度可靠的测量系统至关重要。
3D视觉的好处
更丰富的数据采集
3D视觉可以测量产生2D系统不能的形状信息。 因此,可以测量与形状相关的特征,例如物体平直度,表面角度和体积。
测量稳定性
3D传感器中的所有组件都被牢固地安装在单个光机械组件上,以确保重复性,焦距相对于发射器和成像器平面锁定在位,并且包括温度补偿功能,以便纠正由于金属蠕变而引起的移动。
精度和重复性
利用3D机器视觉提供的深度测量信息,由于物体位置(距传感器的距离)而导致的误差不再可能,这意味着物体可以在传感器的测量体积内的任何位置移动,并仍能得到准确的结果。 这简化了物体固定要求,并降低了系统设计和维护成本。
多传感器拼接
3D机器视觉的另一个好处是能够使用已知的伪像将来自相对较少的多个扫描仪的3D点云拼接在一起,从而校准到通用坐标系。
例如,可以用多个扫描仪扫描诸如卡车框架的大物体。
定位和对准数以百计的二维相机,并使用摄影测量法来生成三维模型要比使用少量高精度的三维扫描仪更加复杂和不准确。
精密机器人视觉指导
工业机器人在三维世界中工作。 盲人机器人仅限于执行重复和结构化的任务。 3D机器视觉使机器人能够感知其物理环境的变化,并相应地进行调整,从而在基本应用中提高了灵活性,实用性和速度,例如拾放。
为什么选择3D机器视觉?
对比度不变,是检查低对比度物体的理想选择
体积测量(X,Y和Z轴)提供形状和位置
对较小的照明变化或环境光不敏感
集成的光学,照明和校准功能提高了重复性
建立大型物体检测的多传感器设置更简单
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~