
用python开发自动扫雷游戏,破世界记录!
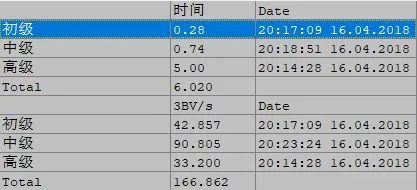
用Python+OpenCV实现了自动扫雷,突破世界记录,我们先来看一下效果吧。
1
准备
准备动手制作一套扫雷自动化软件之前,你需要准备如下一些工具/软件/环境
-
Python3 环境 - 推荐3.6或者以上 [更加推荐Anaconda3,以下很多依赖-库无需安装]
-
Numpy依赖库 [如有Anaconda则无需安装]
-
PIL依赖库 [如有Anaconda则无需安装]
-
Opencv-python
-
Win32gui、win32api依赖库
-
支持Python的IDE [可选,如果你能忍受用文本编辑器写程序也可以]
2
实现思路
-
完成窗体内容截取部分
-
完成雷块分割部分
-
完成雷块类型识别部分
-
完成扫雷算法
class_name = "TMain"
title_name = "Minesweeper Arbiter "
-
ms_arbiter.exe的主窗体类别为"TMain"
-
ms_arbiter.exe的主窗体名称为"Minesweeper Arbiter "
hwnd = win32gui.FindWindow(class_name, title_name)
if hwnd:
left, top, right, bottom = win32gui.GetWindowRect(hwnd)
from PIL import ImageGrab
left += 15
top += 101
right -= 15
bottom -= 43
rect = (left, top, right, bottom)
img = ImageGrab.grab().crop(rect)
block_width, block_height = 16, 16
blocks_x = int((right - left) / block_width)
blocks_y = int((bottom - top) / block_height)
def crop_block(hole_img, x, y):
x1, y1 = x * block_width, y * block_height
x2, y2 = x1 + block_width, y1 + block_height
return hole_img.crop((x1, y1, x2, y2))
blocks_img = [[0 for i in range(blocks_y)] for i in range(blocks_x)]
for y in range(blocks_y):
for x in range(blocks_x):
blocks_img[x][y] = crop_block(img, x, y)
def analyze_block(self, block, location):
block = imageProcess.pil_to_cv(block)
block_color = block[8, 8]
x, y = location[0], location[1]
# -1:Not opened
# -2:Opened but blank
# -3:Un initialized
# Opened
if self.equal(block_color, self.rgb_to_bgr((192, 192, 192))):
if not self.equal(block[8, 1], self.rgb_to_bgr((255, 255, 255))):
self.blocks_num[x][y] = -2
self.is_started = True
else:
self.blocks_num[x][y] = -1
elif self.equal(block_color, self.rgb_to_bgr((0, 0, 255))):
self.blocks_num[x][y] = 1
elif self.equal(block_color, self.rgb_to_bgr((0, 128, 0))):
self.blocks_num[x][y] = 2
elif self.equal(block_color, self.rgb_to_bgr((255, 0, 0))):
self.blocks_num[x][y] = 3
elif self.equal(block_color, self.rgb_to_bgr((0, 0, 128))):
self.blocks_num[x][y] = 4
elif self.equal(block_color, self.rgb_to_bgr((128, 0, 0))):
self.blocks_num[x][y] = 5
elif self.equal(block_color, self.rgb_to_bgr((0, 128, 128))):
self.blocks_num[x][y] = 6
elif self.equal(block_color, self.rgb_to_bgr((0, 0, 0))):
if self.equal(block[6, 6], self.rgb_to_bgr((255, 255, 255))):
# Is mine
self.blocks_num[x][y] = 9
elif self.equal(block[5, 8], self.rgb_to_bgr((255, 0, 0))):
# Is flag
self.blocks_num[x][y] = 0
else:
self.blocks_num[x][y] = 7
elif self.equal(block_color, self.rgb_to_bgr((128, 128, 128))):
self.blocks_num[x][y] = 8
else:
self.blocks_num[x][y] = -3
self.is_mine_form = False
if self.blocks_num[x][y] == -3 or not self.blocks_num[x][y] == -1:
self.is_new_start = False
-
1-8:表示数字1到8
-
9:表示是地雷
-
0:表示插旗
-
-1:表示未打开
-
-2:表示打开但是空白
-
-3:表示不是扫雷游戏中的任何方块类型
-
遍历每一个已经有数字的雷块,判断在它周围的九宫格内未被打开的雷块数量是否和本身数字相同,如果相同则表明周围九宫格内全部都是地雷,进行标记。
-
再次遍历每一个有数字的雷块,取九宫格范围内所有未被打开的雷块,去除已经被上一次遍历标记为地雷的雷块,记录并且点开。
-
如果以上方式无法继续进行,那么说明遇到了死局,选择在当前所有未打开的雷块中随机点击。(当然这个方法不是最优的,有更加优秀的解决方案,但是实现相对麻烦)
def generate_kernel(k, k_width, k_height, block_location):
ls = []
loc_x, loc_y = block_location[0], block_location[1]
for now_y in range(k_height):
for now_x in range(k_width):
if k[now_y][now_x]:
rel_x, rel_y = now_x - 1, now_y - 1
ls.append((loc_y + rel_y, loc_x + rel_x))
return ls
kernel_width, kernel_height = 3, 3
# Kernel mode:[Row][Col]
kernel = [[1, 1, 1], [1, 1, 1], [1, 1, 1]]
# Left border
if x == 0:
for i in range(kernel_height):
kernel[i][0] = 0
# Right border
if x == self.blocks_x - 1:
for i in range(kernel_height):
kernel[i][kernel_width - 1] = 0
# Top border
if y == 0:
for i in range(kernel_width):
kernel[0][i] = 0
# Bottom border
if y == self.blocks_y - 1:
for i in range(kernel_width):
kernel[kernel_height - 1][i] = 0
# Generate the search map
to_visit = generate_kernel(kernel, kernel_width, kernel_height, location)
def count_unopen_blocks(blocks):
count = 0
for single_block in blocks:
if self.blocks_num[single_block[1]][single_block[0]] == -1:
count += 1
return count
def mark_as_mine(blocks):
for single_block in blocks:
if self.blocks_num[single_block[1]][single_block[0]] == -1:
self.blocks_is_mine[single_block[1]][single_block[0]] = 1
unopen_blocks = count_unopen_blocks(to_visit)
if unopen_blocks == self.blocks_num[x][y]:
mark_as_mine(to_visit)
def mark_to_click_block(blocks):
for single_block in blocks:
# Not Mine
if not self.blocks_is_mine[single_block[1]][single_block[0]] == 1:
# Click-able
if self.blocks_num[single_block[1]][single_block[0]] == -1:
# Source Syntax: [y][x] - Converted
if not (single_block[1], single_block[0]) in self.next_steps:
self.next_steps.append((single_block[1], single_block[0]))
def count_mines(blocks):
count = 0
for single_block in blocks:
if self.blocks_is_mine[single_block[1]][single_block[0]] == 1:
count += 1
return count
mines_count = count_mines(to_visit)
if mines_count == block:
mark_to_click_block(to_visit)
# Analyze the number of blocks
self.iterate_blocks_image(BoomMine.analyze_block)
# Mark all mines
self.iterate_blocks_number(BoomMine.detect_mine)
# Calculate where to click
self.iterate_blocks_number(BoomMine.detect_to_click_block)
if self.is_in_form(mouseOperation.get_mouse_point()):
for to_click in self.next_steps:
on_screen_location = self.rel_loc_to_real(to_click)
mouseOperation.mouse_move(on_screen_location[0], on_screen_location[1])
mouseOperation.mouse_click()
评论