点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
在7月底结束的“2021(第四届)高工机器人集成商大会”上,我们无意间听到了来自星猿哲科技CEO周佳骥先生的一个报告,是关于3D视觉技术的,小编感觉他们的研究有亮点,简易和给大家分享一下星猿哲科技的3D视觉技术。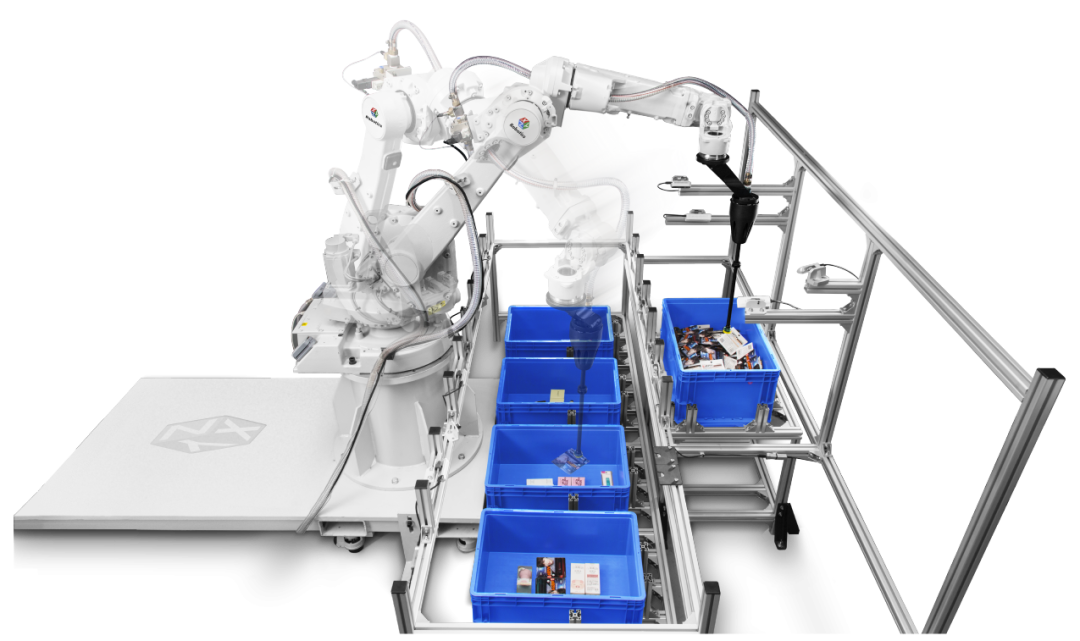
星猿哲科技的CEO周佳骥认为3D视觉存在三大应用痛点:1)为保证精准、高效生产,客户迫切需要具备高性能、高稳定性的传感器及能有效处理反光件、黑色件等常见工件的3D视觉算法;2)需要依靠运动规划算法来解决复杂场景的机器人调试难题;3)客户对极致使用体验的追求,尤其是性价比、易用性。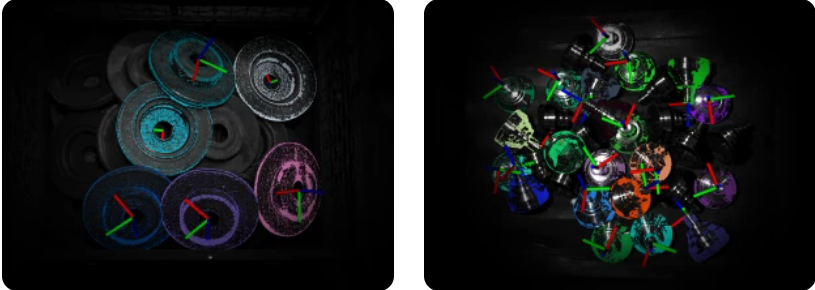
之前看到亚马逊机器人物流负责人Scott Anderson有过这样一种说法,“光是简单的将从未见过的物品识别出并拣出,就需要一系列复杂且先进的软件及硬件,且目前还难以商用化。”这需要机械手臂能够像人手一样精准、快速地从一堆货品中拣出单件、多件货品,同时不损伤其他货品,需要机器视觉、三维感知、运动控制等多项技术的无缝配合。一一比对这三大痛点,不难看出,也正是星猿哲科技在3D视觉上的发力点,方向很明确,我们打开星猿哲科技的官网,会看到他们在3D视觉技术上取得的很多突破:3D视觉系统采用独特视觉算法,可应对各种材质、颜色、形状的物体,降低反光、黑色、紧密排布、堆叠遮挡对识别的影响,实现高精度的识别能力。
根据识别对象匹配不同类型相机,可应用于毛坯件、精加工金属件、涂漆件等多种工件,覆盖范围广。
.jpg")
机器人抓取时存在的干涉问题,需要借助运动规划算法,引导机器人实现轨迹避障。星猿哲科技的轨迹规划算法免去繁琐示教过程,可自动避开障碍物,生成时间最优路径。
事实上,运动规划算法技术是提高机器人易用性和扩展机器人应用边界的基础,结合视觉标定和点云合成等算法,不仅能大大降低机器人上下料、分拣等传统应用的成本,还能不断解锁各种对柔性化要求较高的应用场景。
上面也叙述了,无需人工示教,即可在用户端自动生成无碰撞运动轨迹,可自动手眼标定,过去数日才能完成的调试设定,现在仅需几步即可完成设定,大幅缩短部署周期(连接机器人≤5分钟,自动曝光与手眼标定标定 <10分钟,设置工作空间≤5分钟,设置环境障碍物<5分钟,注册抓取姿态<5分钟)。支持主流机器人型号和自定义机器人模型,提供便捷接口,导入自定义的环境和工具模型。
3D视觉同样为传统研究领域,最近5年内得到快速发展,工业机器人公众号将会针对该行业深入关注和报道行业的新技术。另外,传感器/相机作为3D视觉的眼睛,其在3D技术演进及落地应用过程中所占的位置十分重要,甚至一定程度上决定了3D视觉技术的发展和应用。除了视觉传感器(相机)外,3D视觉相关的数据采集设备还包括:毫米波雷达、激光雷达等也是我们要着重关注的行业,特别是近年来自动驾驶发展很快,就用到了激光雷达。高工机器人:《从高性能识别到极易部署,开启3D视觉新时代》 XYZ Robotics:《从高性能识别到极易部署,全新赋能3D视觉系统》☞来源:工业机器人 ☞本文编辑:朱光明
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!



 下载APP
下载APP