
即插即用!盘点11种CNN网络设计中通用插件
极市导读
所谓“插件”,就是要能锦上添花,又容易植入、落地,即真正的即插即用。本文盘点的“插件”能够提升CNN平移、旋转、scale等变性能力或多尺度特征提取,感受野等能力,在很多SOTA网络中都会看到它们的影子。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
前言
本文盘点一些CNN网络中设计比较精巧而又实用的“插件”。所谓“插件”,就是不改变网络主体结构, 可以很容易嵌入到主流网络当中,提高网络提取特征的能力,能够做到plug-and-play。网络也有很多类似盘点工作,都宣称所谓的即插即用、无痛涨点。不过根据笔者经验和收集,发现很多插件都是不实用、不通用、甚至不work的,于是有了这一篇。
首先,我的认识是:既然是“插件”,就要是锦上添花的,又容易植入,容易落地的,真正的即插即用。本文盘点的“插件”,在很多SOTA网络中会看到它们的影子。是值得推广的良心“插件”,真正能做到plug-and-play。总之一句话,就是能够work的“插件”。很多“插件”都为提升CNN能力而推出的,例如平移、旋转、scale等变性能力,多尺度特征提取能力,感受野等能力,感知空间位置能力等等。
入围名单:STN、ASPP、Non-local、SE、CBAM、DCNv1&v2、CoordConv、Ghost、BlurPool、RFB、ASFF
1 STN
出自论文:Spatial Transformer Networks
论文链接:https://arxiv.org/pdf/1506.02025.pdf
核心解析:
在OCR等任务中,你会经常看到它的身影。对于CNN网络,我们希望其具有对物体的姿态、位置等有一定的不变性。即在测试集上可以适应一定的姿态、位置的变化。不变性或等变性可以有效提高模型泛化能力。虽然CNN使用sliding-window卷积操作,在一定程度上具有平移不变性。但很多研究发现,下采样会破坏网络的平移不变性。所以可以认为网络的不变性能力非常弱,更不用说旋转、尺度、光照等不变性。一般我们利用数据增强来实现网络的“不变性”。
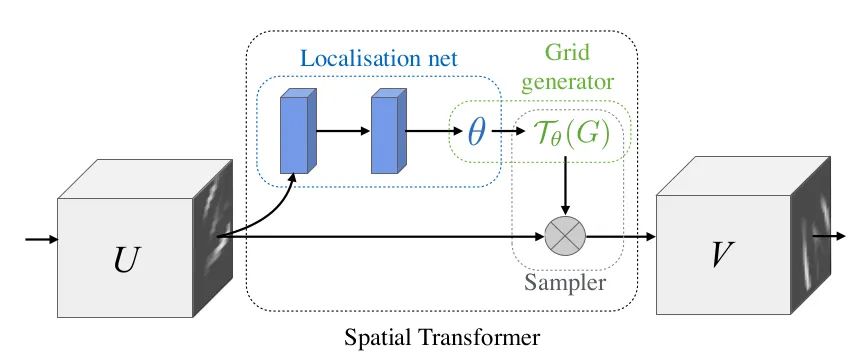
本文提出STN模块,显式将空间变换植入到网络当中,进而提高网络的旋转、平移、尺度等不变性。可以理解为“对齐”操作。STN的结构如上图所示,每一个STN模块由Localisation net,Grid generator和Sampler三部分组成。Localisation net用于学习获取空间变换的参数,就是上式中的六个参数。Grid generator用于坐标映射。Sampler用于像素的采集,是利用双线性插值的方式进行。
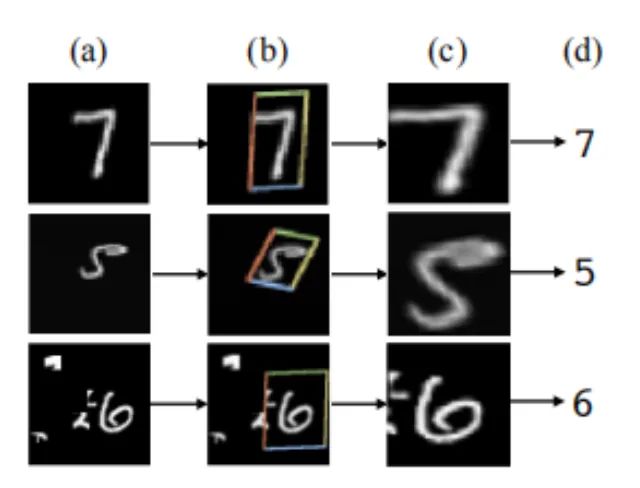
STN的意义是能够把原始的图像纠正成为网络想要的理想图像,并且该过程为无监督的方式进行,也就是变换参数是自发学习获取的,不需要标注信息。该模块是一个独立模块,可以在CNN的任何位置插入。符合本次“插件”的盘点要求。
核心代码:
class SpatialTransformer(nn.Module):def __init__(self, spatial_dims):super(SpatialTransformer, self).__init__()self._h, self._w = spatial_dimsself.fc1 = nn.Linear(32*4*4, 1024) # 可根据自己的网络参数具体设置self.fc2 = nn.Linear(1024, 6)def forward(self, x):batch_images = x #保存一份原始数据x = x.view(-1, 32*4*4)# 利用FC结构学习到6个参数x = self.fc1(x)x = self.fc2(x)x = x.view(-1, 2,3) # 2x3# 利用affine_grid生成采样点affine_grid_points = F.affine_grid(x, torch.Size((x.size(0), self._in_ch, self._h, self._w)))# 将采样点作用到原始数据上rois = F.grid_sample(batch_images, affine_grid_points)return rois, affine_grid_points
2 ASPP
插件全称:atrous spatial pyramid pooling
出自论文:DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Conv
论文链接:https://arxiv.org/pdf/1606.00915.pdf
核心解析:
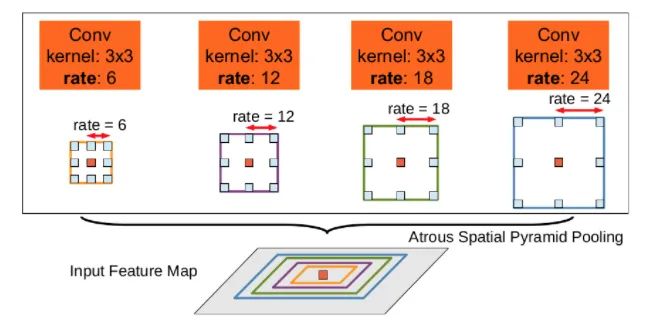
本插件是带有空洞卷积的空间金字塔池化模块,主要是为了提高网络的感受野,并引入多尺度信息而提出的。我们知道,对于语义分割网络,通常面临是分辨率较大的图片,这就要求我们的网络有足够的感受野来覆盖到目标物体。对于CNN网络基本是靠卷积层的堆叠加上下采样操作来获取感受野的。本文的该模块可以在不改变特征图大小的同时控制感受野,这有利于提取多尺度信息。其中rate控制着感受野的大小,r越大感受野越大。
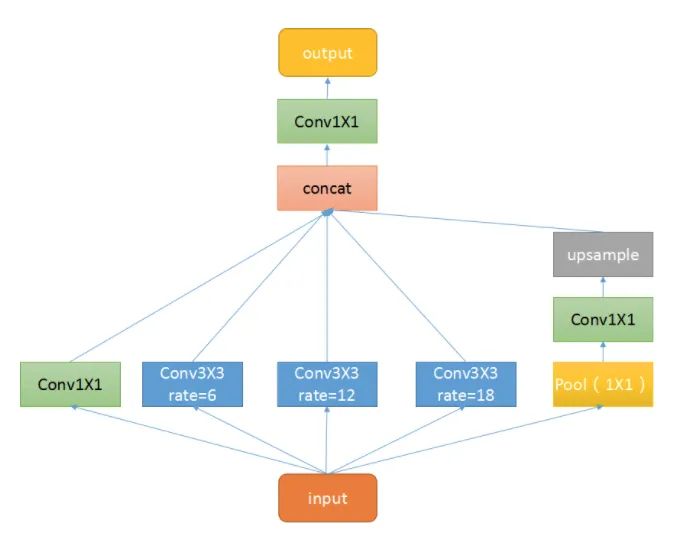
ASPP主要包含以下几个部分:1. 一个全局平均池化层得到image-level特征,并进行1X1卷积,并双线性插值到原始大小;2. 一个1X1卷积层,以及三个3X3的空洞卷积;3. 将5个不同尺度的特征在channel维度concat在一起,然后送入1X1的卷积进行融合输出。
核心代码:
class ASPP(nn.Module):def __init__(self, in_channel=512, depth=256):super(ASPP,self).__init__()self.mean = nn.AdaptiveAvgPool2d((1, 1))self.conv = nn.Conv2d(in_channel, depth, 1, 1)self.atrous_block1 = nn.Conv2d(in_channel, depth, 1, 1)# 不同空洞率的卷积self.atrous_block6 = nn.Conv2d(in_channel, depth, 3, 1, padding=6, dilation=6)self.atrous_block12 = nn.Conv2d(in_channel, depth, 3, 1, padding=12, dilation=12)self.atrous_block18 = nn.Conv2d(in_channel, depth, 3, 1, padding=18, dilation=18)self.conv_1x1_output = nn.Conv2d(depth * 5, depth, 1, 1)def forward(self, x):size = x.shape[2:]# 池化分支image_features = self.mean(x)image_features = self.conv(image_features)image_features = F.upsample(image_features, size=size, mode='bilinear')# 不同空洞率的卷积atrous_block1 = self.atrous_block1(x)atrous_block6 = self.atrous_block6(x)atrous_block12 = self.atrous_block12(x)atrous_block18 = self.atrous_block18(x)# 汇合所有尺度的特征x = torch.cat([image_features, atrous_block1, atrous_block6,atrous_block12, atrous_block18], dim=1)# 利用1X1卷积融合特征输出x = self.conv_1x1_output(x)return net
3 Non-local
出自论文:Non-local Neural Networks
论文链接:https://arxiv.org/abs/1711.07971
核心解析:
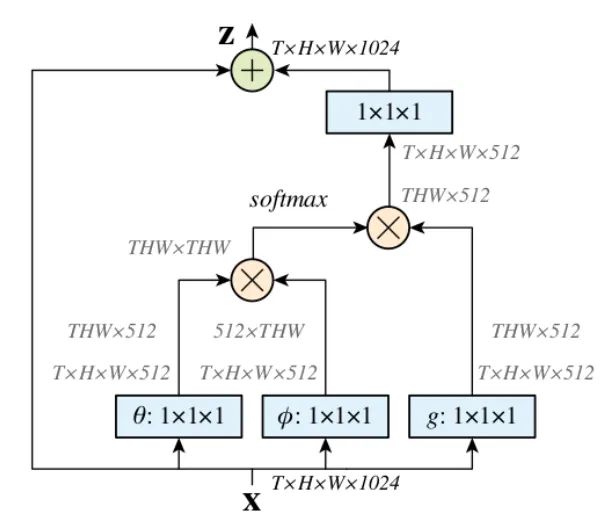
Non-Local是一种attention机制,也是一个易于植入和集成的模块。Local主要是针对感受野(receptive field)来说的,以CNN中的卷积操作和池化操作为例,它的感受野大小就是卷积核大小,而我们常用3X3的卷积层进行堆叠,它只考虑局部区域,都是local的运算。不同的是,non-local操作感受野可以很大,可以是全局区域,而不是一个局部区域。捕获长距离依赖(long-range dependencies),即如何建立图像上两个有一定距离的像素之间的联系,是一种注意力机制。所谓注意力机制就是利用网络生成saliency map,注意力对应的是显著性区域,是需要网络重点关注的区域。
首先分别对输入的特征图进行 1X1的卷积来压缩通道数,得到特征。 通过reshape操作,转化三个特征的维度,然后对进行矩阵乘操作,得到类似协方差矩阵, 这一步为了计算出特征中的自相关性,即得到每帧中每个像素对其他所有帧所有像素的关系。 然后对自相关特征进行 Softmax 操作,得到0~1的weights,这里就是我们需要的 Self-attention系数。 最后将 attention系数,对应乘回特征矩阵g上,与原输入 feature map X 残差相加输出即可。
这里我们结合一个简单例子理解一下,假设g为(我们暂时不考虑batch和channel维度):
g = torch.tensor([[1, 2],[]).view(-1, 1).float()
为:
theta = torch.tensor([2, 4, 6, 8]).view(-1, 1)
为:
phi = torch.tensor([7, 5, 3, 1]).view(1, -1)
那么,和矩阵相乘如下:
tensor([[14., 10., 6., 2.],[28., 20., 12., 4.],[42., 30., 18., 6.],[56., 40., 24., 8.]])
进过softmax(dim=-1)后如下,每一行代表着g里面的元素的重要程度,每一行前面的值比较大,因此希望多“注意”到g前面的元素,也就是1比较重要一点。或者这样理解:注意力矩阵代表着g中每个元素和其他元素的依赖程度。
tensor([[9.8168e-01, 1.7980e-02, 3.2932e-04, 6.0317e-06],[9.9966e-01, 3.3535e-04, 1.1250e-07, 3.7739e-11],[9.9999e-01, 6.1442e-06, 3.7751e-11, 2.3195e-16],[1.0000e+00, 1.1254e-07, 1.2664e-14, 1.4252e-21]])
注意力作用上之后,整体值向原始g中的值都向1靠拢:
tensor([[1.0187, 1.0003],[1.0000, 1.0000]])
核心代码:
class NonLocal(nn.Module):def __init__(self, channel):super(NonLocalBlock, self).__init__()self.inter_channel = channel // 2self.conv_phi = nn.Conv2d(channel, self.inter_channel, 1, 1,0, False)self.conv_theta = nn.Conv2d(channel, self.inter_channel, 1, 1,0, False)self.conv_g = nn.Conv2d(channel, self.inter_channel, 1, 1, 0, False)self.softmax = nn.Softmax(dim=1)self.conv_mask = nn.Conv2d(self.inter_channel, channel, 1, 1, 0, False)def forward(self, x):b, c, h, w = x.size()x_phi = self.conv_phi(x).view(b, c, -1)x_theta = self.conv_theta(x).view(b, c, -1).permute(0, 2, 1).contiguous()x_g = self.conv_g(x).view(b, c, -1).permute(0, 2, 1).contiguous()mul_theta_phi = torch.matmul(x_theta, x_phi)mul_theta_phi = self.softmax(mul_theta_phi)mul_theta_phi_g = torch.matmul(mul_theta_phi, x_g)mul_theta_phi_g = mul_theta_phi_g.permute(0, 2, 1).contiguous().view(b, self.inter_channel, h, w)mask = self.conv_mask(mul_theta_phi_g)out = mask + xreturn out
4 SE
出自论文:Squeeze-and-Excitation Networks
论文链接:https://arxiv.org/pdf/1709.01507.pdf
 核心解析:
核心解析:
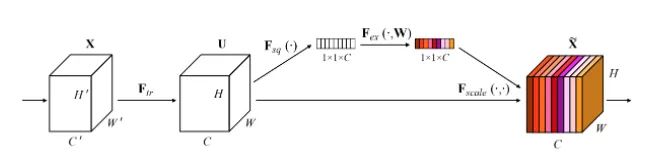
本文是ImageNet最后一届比赛的冠军作品,你会在很多经典网络结构中看到它的身影,例如Mobilenet v3。其实是一种通道注意力机制。由于特征压缩和FC的存在,其捕获的通道注意力特征是具有全局信息的。本文提出了一种新的结构单元——“Squeeze-and Excitation(SE)”模块,可以自适应的调整各通道的特征响应值,对通道间的内部依赖关系进行建模。有以下几个步骤:
Squeeze: 沿着空间维度进行特征压缩,将每个二维的特征通道变成一个数,是具有全局的感受野。
Excitation: 每个特征通道生成一个权重,用来代表该特征通道的重要程度。
Reweight:将Excitation输出的权重看做每个特征通道的重要性,通过相乘的方式作用于每一个通道上。
核心代码:
class SE_Block(nn.Module):def __init__(self, ch_in, reduction=16):super(SE_Block, self).__init__()self.avg_pool = nn.AdaptiveAvgPool2d(1) # 全局自适应池化self.fc = nn.Sequential(nn.Linear(ch_in, ch_in // reduction, bias=False),nn.ReLU(inplace=True),nn.Linear(ch_in // reduction, ch_in, bias=False),nn.Sigmoid())def forward(self, x):b, c, _, _ = x.size()y = self.avg_pool(x).view(b, c) # squeeze操作y = self.fc(y).view(b, c, 1, 1) # FC获取通道注意力权重,是具有全局信息的return x * y.expand_as(x) # 注意力作用每一个通道上
5 CBAM
出自论文:CBAM: Convolutional Block Attention Module
论文链接:https://openaccess.thecvf.com/content_ECCV_2018/papers/Sanghyun_Woo_Convolutional_Block_Attention_ECCV_2018_paper.pdf
核心解析:
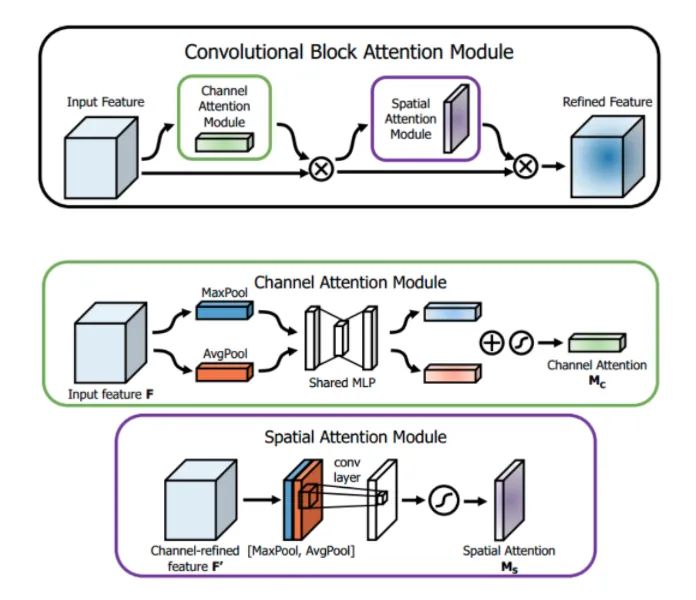
SENet在feature map的通道上进行attention权重获取,然后与原来的feature map相乘。这篇文章指出,该种attention方法法只关注了通道层面上哪些层会具有更强的反馈能力,但是在空间维度上并不能体现出attention。CBAM作为本文的亮点,将attention同时运用在channel和spatial两个维度上, CBAM与SE Module一样,可以嵌入在大部分的主流网络中,在不显著增加计算量和参数量的前提下能提升模型的特征提取能力。
通道注意力: 如上图所示,输入是一个 H×W×C 的特征F,我们先分别进两个空间的全局平均池化和最大池化得到 两个 1×1×C 的通道描述。再将它们分别送进一个两层的神经网络,第一层神经元个数为 C/r,激活函数为 Relu,第二层神经元个数为 C。注意,这个两层的神经网络是共享的。然后,再将得到的两个特征相加后经过一个 Sigmoid 激活函数得到权重系数 Mc。最后,拿权重系数和 原来的特征 F 相乘即可得到缩放后的新特征。伪代码:
def forward(self, x):# 利用FC获取全局信息,和Non-local的矩阵相乘本质上式一样的avg_out = self.fc2(self.relu1(self.fc1(self.avg_pool(x))))max_out = self.fc2(self.relu1(self.fc1(self.max_pool(x))))out = avg_out + max_outreturn self.sigmoid(out)
空间注意力: 与通道注意力相似,给定一个 H×W×C 的特征 F‘,我们先分别进行一个通道维度的平均池化和最大池化得到两个 H×W×1 的通道描述,并将这两个描述按照通道拼接在一起。然后,经过一个 7×7 的卷积层, 激活函数为 Sigmoid,得到权重系数 Ms。最后,拿权重系数和特征 F’ 相乘即可得到缩放后的新特征。伪代码:
def forward(self, x):# 这里利用池化获取全局信息avg_out = torch.mean(x, dim=1, keepdim=True)max_out, _ = torch.max(x, dim=1, keepdim=True)x = torch.cat([avg_out, max_out], dim=1)x = self.conv1(x)return self.sigmoid(x)
6 DCN v1&v2
插件全称:Deformable Convolutional
出自论文:
v1: [Deformable Convolutional Networks]
https://arxiv.org/pdf/1703.06211.pdf
v2: [Deformable ConvNets v2: More Deformable, Better Results]
https://arxiv.org/pdf/1811.11168.pdf
核心解析:
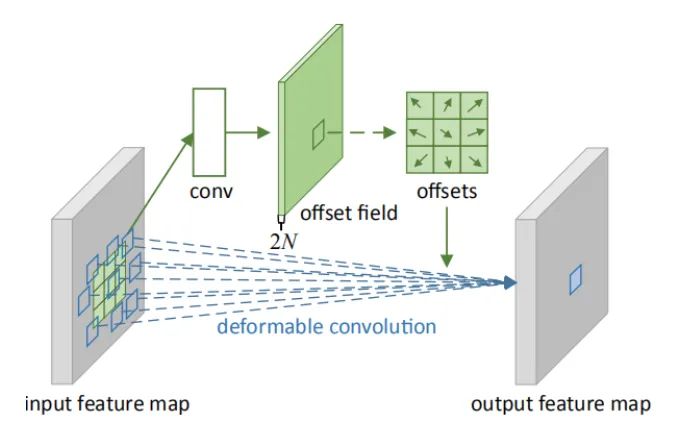
变形卷积可以看作变形+卷积两个部分,因此可以当作插件使用。在各大主流检测网络中,变形卷积真是涨点神器,网上解读也非常之多。和传统的固定窗口的卷积相比,变形卷积可以有效地对几何图形,因为它的“局部感受野”是可学习的,面向全图的。这篇论文同时提出了deformable ROI pooling,这两个方法都是增加额外偏移量的空间采样位置,不需要额外的监督,是自监督的过程。
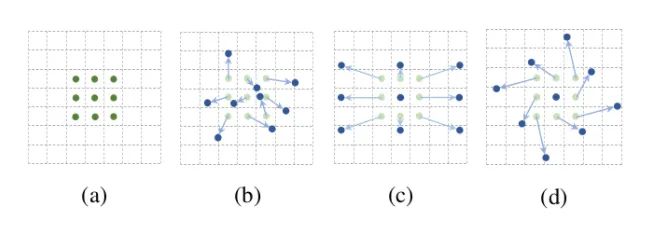
如上图所示,a为不同的卷积,b为变形卷积,深色的点为卷积核实际采样的位置,和“标准的”位置有一定的偏移。c和d为变形卷积的特殊形式,其中c为我们常见到的空洞卷积,d为具有学习旋转特性的卷积,也具备提升感受野的能力。
变形卷积和STN过程非常类似,STN是利用网络学习出空间变换的6个参数,对特征图进行整体变换,旨在增加网络对形变的提取能力。DCN是利用网络学习数整图offset,比STN的变形更“全面一点”。STN是仿射变换,DCN是任意变换。公式不贴了,可以直接看代码实现过程。
变形卷积具有V1和V2两个版本,其中V2是在V2的基础上进行改进,除了采样offset,还增加了采样权重。V2认为3X3采样点也应该具有不同的重要程度,因此该处理方法更具有灵活性和拟合能力。
核心代码:
def forward(self, x):# 学习出offset,包括x和y两个方向,注意是每一个channel中的每一个像素都有一个x和y的offsetoffset = self.p_conv(x)if self.v2: # V2的时候还会额外学习一个权重系数,经过sigmoid拉到0和1之间m = torch.sigmoid(self.m_conv(x))# 利用offset对x进行插值,获取偏移后的x_offsetx_offset = self.interpolate(x,offset)if self.v2: # V2的时候,将权重系数作用到特征图上m = m.contiguous().permute(0, 2, 3, 1)m = m.unsqueeze(dim=1)m = torch.cat([m for _ in range(x_offset.size(1))], dim=1)x_offset *= mout = self.conv(x_offset) # offset作用后,在进行标准的卷积过程return out
7 CoordConv
出自论文:An intriguing failing of convolutional neural networks and the CoordConv solution
论文链接:https://arxiv.org/pdf/1807.03247.pdf
核心解析:
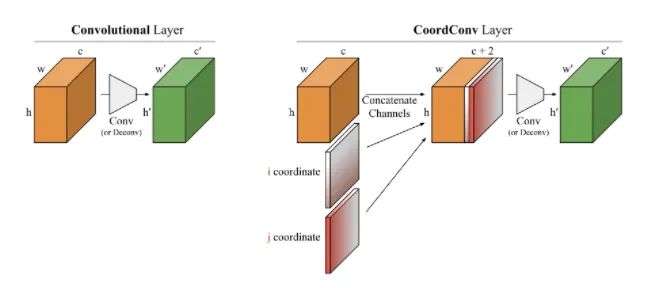
在Solo语义分割算法和Yolov5中你可以看到它的身影。本文从几个小实验为出发点,探究了卷积网络在坐标变换上的能力。就是它无法将空间表示转换成笛卡尔空间中的坐标。如下图所示,我们向一个网络中输入(i, j)坐标,要求它输出一个64×64的图像,并在坐标处画一个正方形或者一个像素,然而网络在测试集上却无法完成。虽然这项任务是我们人类认为极其简单的工作。分析原因是卷积作为一种局部的、共享权重的过滤器应用到输入上时,它是不知道每个过滤器在哪,无法捕捉位置信息的。因此我们可以帮助卷积,让它知道过滤器的位置。仅仅需要在输入上添加两个通道,一个是i坐标,另一个是j坐标。具体做法如上图所示,送入滤波器之前增加两个通道。这样,网络就具备了空间位置信息的能力,是不是很神奇?你可以随机在分类、分割、检测等任务中使用这种挂件。
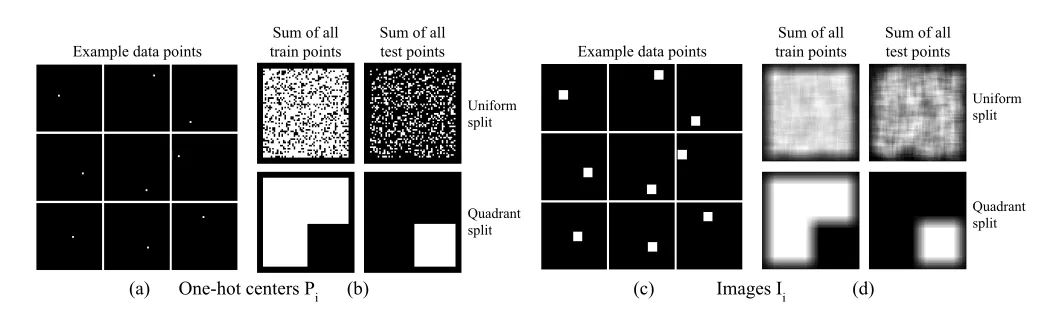
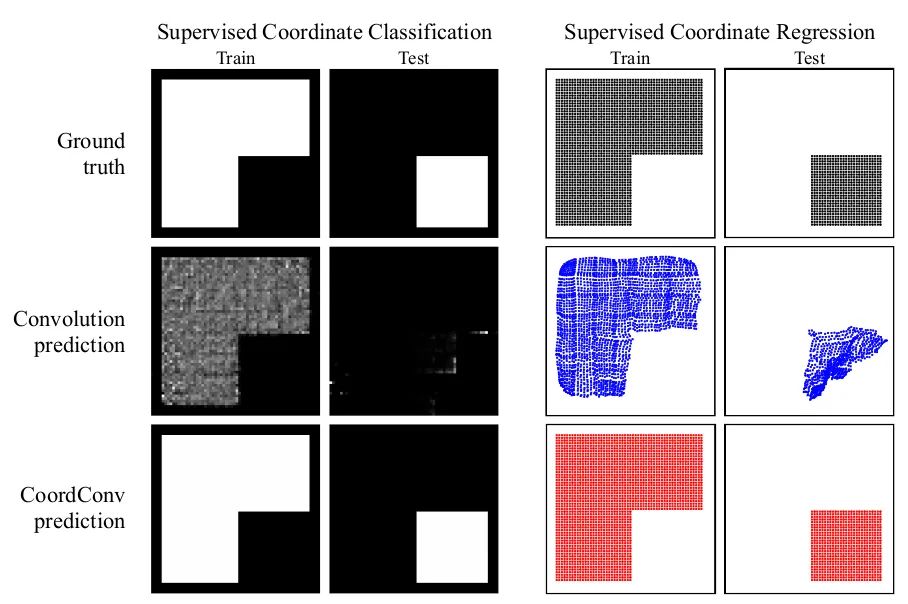
如上面第一组图片,传统的CNN在根据坐标数值生成图像的任务中,训练集很好,测试集一团糟。第二组图片增加了 CoordConv 之后可以轻松完成该任务,可见其增加了CNN空间感知的能力。
核心代码:
ins_feat = x # 当前实例特征tensor# 生成从-1到1的线性值x_range = torch.linspace(-1, 1, ins_feat.shape[-1], device=ins_feat.device)y_range = torch.linspace(-1, 1, ins_feat.shape[-2], device=ins_feat.device)y, x = torch.meshgrid(y_range, x_range) # 生成二维坐标网格y = y.expand([ins_feat.shape[0], 1, -1, -1]) # 扩充到和ins_feat相同维度x = x.expand([ins_feat.shape[0], 1, -1, -1])coord_feat = torch.cat([x, y], 1) # 位置特征ins_feat = torch.cat([ins_feat, coord_feat], 1) # concatnate一起作为下一个卷积的输入
8 Ghost
插件全称:Ghost module
出自论文:GhostNet: More Features from Cheap Operations
论文链接:https://arxiv.org/pdf/1911.11907.pdf
核心解析:
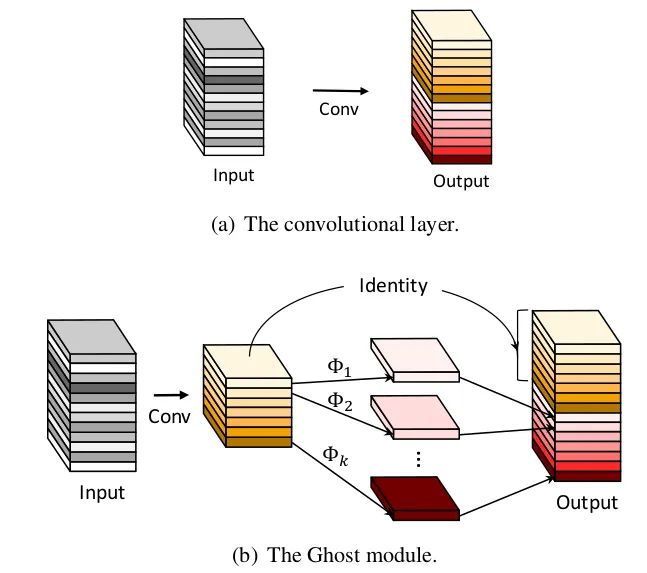
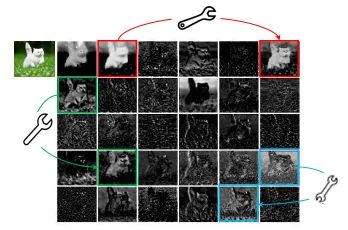
在ImageNet的分类任务上,GhostNet在相似计算量情况下Top-1正确率达75.7%,高于MobileNetV3的75.2%。其主要创新点就是提出了Ghost 模块。在CNN模型中,特征图是存在大量的冗余,当然这也是非常重要和有必要的。如下图所示,其中标“小扳手”的特征图都存在冗余的特征图。那么能否降低卷积的通道数,然后利用某种变换生成冗余的特征图?事实上这就是GhostNet的思路。
而本文就从特征图冗余问题出发,提出一个仅通过少量计算(论文称为cheap operations)就能生成大量特征图的结构——Ghost Module。而cheap operations就是线性变换,论文中采用卷积操作实现。具体过程如下:
使用比原始更少量卷积运算,比如正常用64个卷积核,这里就用32个,减少一半的计算量。
利用深度分离卷积,从上面生成的特征图中变换出冗余的特征。
上面两步获取的特征图concat起来输出,送入后续的环节。
核心代码:
class GhostModule(nn.Module):def __init__(self, inp, oup, kernel_size=1, ratio=2, dw_size=3, stride=1, relu=True):super(GhostModule, self).__init__()self.oup = oupinit_channels = math.ceil(oup / ratio)new_channels = init_channels*(ratio-1)self.primary_conv = nn.Sequential(nn.Conv2d(inp, init_channels, kernel_size, stride, kernel_size//2, bias=False),nn.BatchNorm2d(init_channels),nn.ReLU(inplace=True) if relu else nn.Sequential(), )self.cheap_operation = nn.Sequential(nn.Conv2d(init_channels, new_channels, dw_size, 1, dw_size//2, groups=init_channels, bias=False),nn.BatchNorm2d(new_channels),nn.ReLU(inplace=True) if relu else nn.Sequential(),)def forward(self, x):x1 = self.primary_conv(x)x2 = self.cheap_operation(x1)out = torch.cat([x1,x2], dim=1)return out[:,:self.oup,:,:]
9 BlurPool
出自论文:Making Convolutional Networks Shift-Invariant Again
论文链接:https://arxiv.org/abs/1904.11486
核心解析:
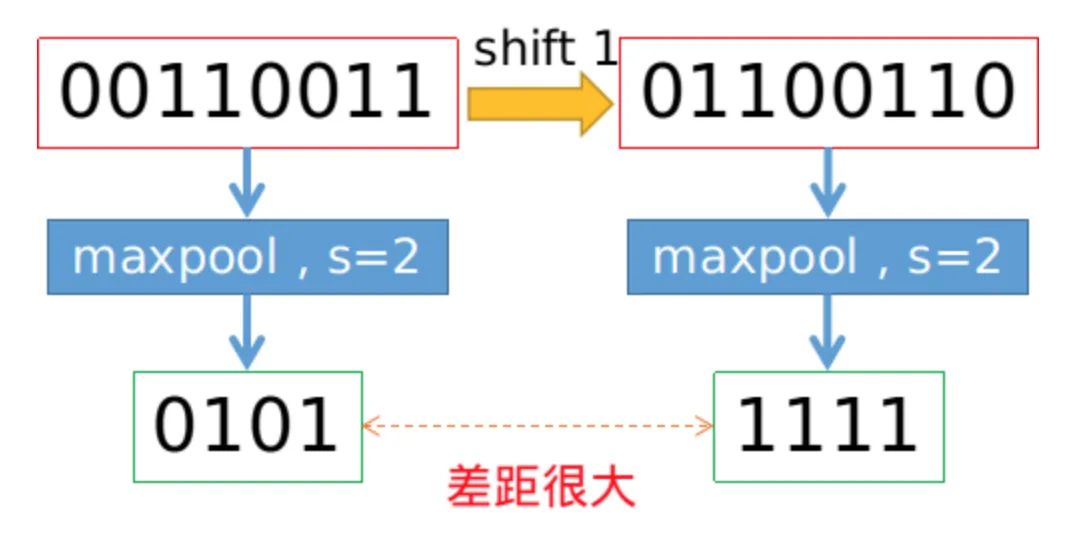
我们都知道,基于滑动窗口的卷积操作是具有平移不变性的,因此也默认为CNN网络具有平移不变性或等变性,事实上真的如此吗?实践发现,CNN网络真的非常敏感,只要输入图片稍微改一个像素,或者平移一个像素,CNN的输出就会发生巨大的变化,甚至预测错误。这可是非常不具有鲁棒性的。一般情况下我们利用数据增强获取所谓的不变性。本文研究发现,不变性的退化根本原因就在于下采样,无论是Max Pool还是Average Pool,抑或是stride>1的卷积操作,只要是涉及步长大于1的下采样,均会导致平移不变性的丢失。具体示例如下图所示,仅仅平移一个像素,Max pool的结果就差距很大。
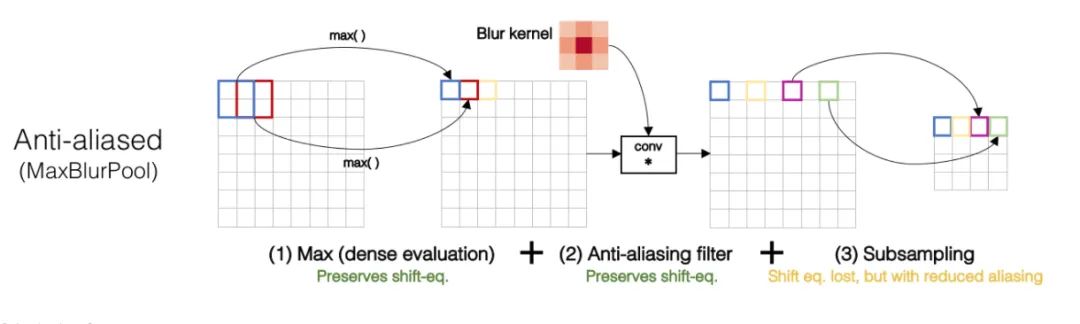
为了保持平移不变性,可以在下采样之前进行低通滤波。传统的max pool可以分解为两部分,分别是stride = 1的max + 下采样 。因此作者提出的MaxBlurPool = max + blur + 下采样来替代原始的max pool。实验发现,该操作虽然不能彻底解决平移不变性的丢失,但是可以很大程度上缓解。
核心代码:
class BlurPool(nn.Module):def __init__(self, channels, pad_type='reflect', filt_size=4, stride=2, pad_off=0):super(BlurPool, self).__init__()self.filt_size = filt_sizeself.pad_off = pad_offself.pad_sizes = [int(1.*(filt_size-1)/2), int(np.ceil(1.*(filt_size-1)/2)), int(1.*(filt_size-1)/2), int(np.ceil(1.*(filt_size-1)/2))]self.pad_sizes = [pad_size+pad_off for pad_size in self.pad_sizes]self.stride = strideself.off = int((self.stride-1)/2.)self.channels = channels# 定义一系列的高斯核if(self.filt_size==1):a = np.array([1.,])elif(self.filt_size==2):a = np.array([1., 1.])elif(self.filt_size==3):a = np.array([1., 2., 1.])elif(self.filt_size==4):a = np.array([1., 3., 3., 1.])elif(self.filt_size==5):a = np.array([1., 4., 6., 4., 1.])elif(self.filt_size==6):a = np.array([1., 5., 10., 10., 5., 1.])elif(self.filt_size==7):a = np.array([1., 6., 15., 20., 15., 6., 1.])filt = torch.Tensor(a[:,None]*a[None,:])filt = filt/torch.sum(filt) # 归一化操作,保证特征经过blur后信息总量不变# 非grad操作的参数利用buffer存储self.register_buffer('filt', filt[None,None,:,:].repeat((self.channels,1,1,1)))self.pad = get_pad_layer(pad_type)(self.pad_sizes)def forward(self, inp):if(self.filt_size==1):if(self.pad_off==0):return inp[:,:,::self.stride,::self.stride]else:return self.pad(inp)[:,:,::self.stride,::self.stride]else:# 利用固定参数的conv2d+stride实现blurpoolreturn F.conv2d(self.pad(inp), self.filt, stride=self.stride, groups=inp.shape[1])
10 RFB
插件全称:Receptive Field Block
出自论文:Receptive Field Block Net for Accurate and Fast Object Detection
论文链接:https://arxiv.org/abs/1711.07767
核心解析:
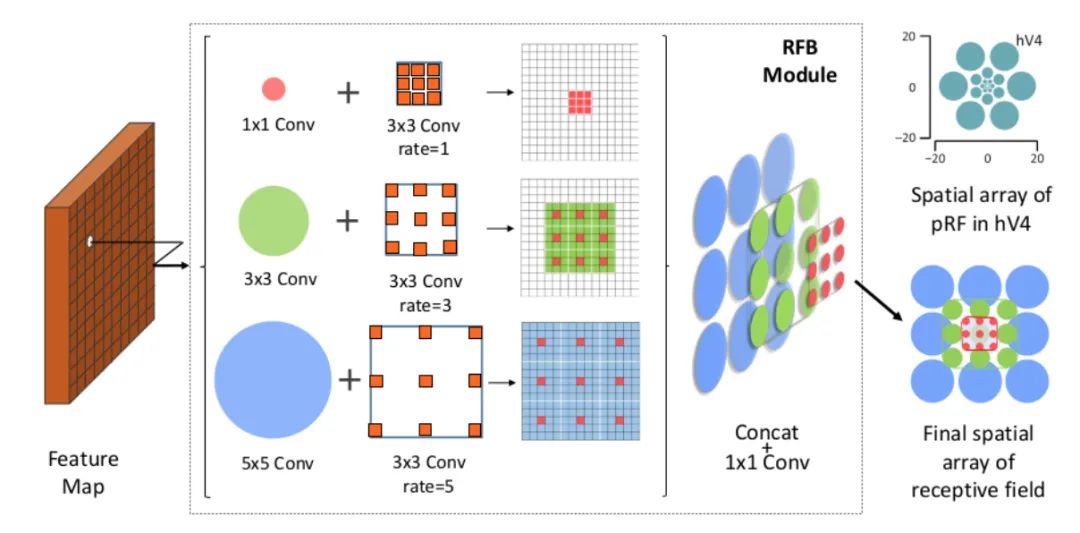
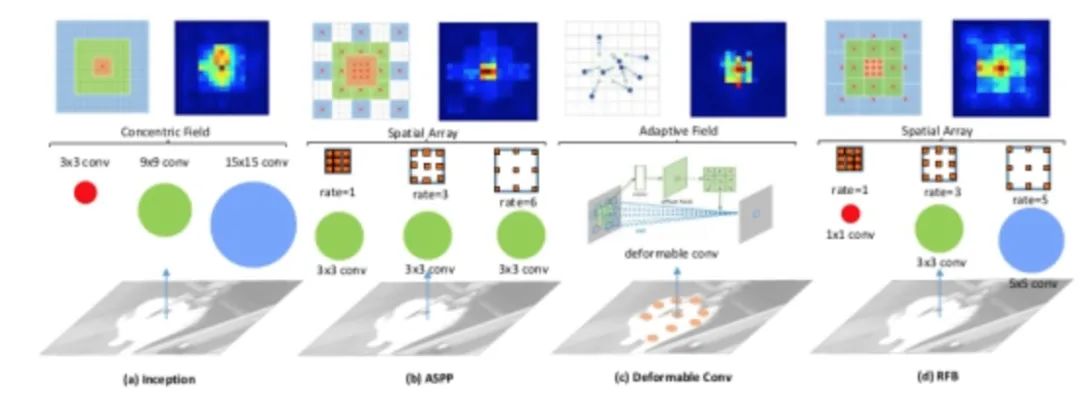
论文发现目标区域要尽量靠近感受野中心,这会有助于提升模型对小尺度空间位移的鲁棒性。因此受人类视觉RF结构的启发,本文提出了感受野模块(RFB),加强了CNN模型学到的深层特征的能力,使检测模型更加准确。RFB可以作为一种通用模块嵌入到绝大多数网路当中。下图可以看出其和inception、ASPP、DCN的区别,可以看作是inception+ASPP的结合。
具体实现如下图,其实和ASPP类似,不过是使用了不同大小的卷积核作为空洞卷积的前置操作。
核心代码:
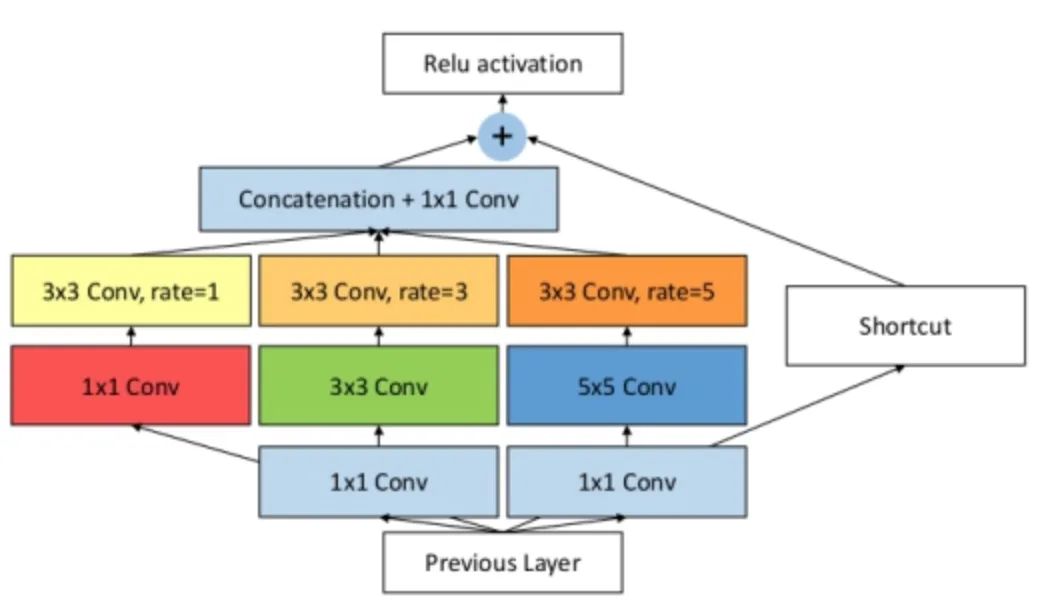
class RFB(nn.Module):def __init__(self, in_planes, out_planes, stride=1, scale = 0.1, visual = 1):super(RFB, self).__init__()self.scale = scaleself.out_channels = out_planesinter_planes = in_planes // 8self.branch0 = nn.Sequential(conv_bn_relu(in_planes, 2*inter_planes, 1, stride),conv_bn_relu(2*inter_planes, 2*inter_planes, 3, 1, visual, visual, False))self.branch1 = nn.Sequential(conv_bn_relu(in_planes, inter_planes, 1, 1),conv_bn_relu(inter_planes, 2*inter_planes, (3,3), stride, (1,1)),conv_bn_relu(2*inter_planes, 2*inter_planes, 3, 1, visual+1,visual+1,False))self.branch2 = nn.Sequential(conv_bn_relu(in_planes, inter_planes, 1, 1),conv_bn_relu(inter_planes, (inter_planes//2)*3, 3, 1, 1),conv_bn_relu((inter_planes//2)*3, 2*inter_planes, 3, stride, 1),conv_bn_relu(2*inter_planes, 2*inter_planes, 3, 1, 2*visual+1, 2*visual+1,False) )self.ConvLinear = conv_bn_relu(6*inter_planes, out_planes, 1, 1, False)self.shortcut = conv_bn_relu(in_planes, out_planes, 1, stride, relu=False)self.relu = nn.ReLU(inplace=False)def forward(self,x):x0 = self.branch0(x)x1 = self.branch1(x)x2 = self.branch2(x)out = torch.cat((x0,x1,x2),1)out = self.ConvLinear(out)short = self.shortcut(x)out = out*self.scale + shortout = self.relu(out)return out
11 ASFF
插件全称:Adaptively Spatial Feature Fusion
出自论文:Adaptively Spatial Feature Fusion Learning Spatial Fusion for Single-Shot Object Detection
论文链接:https://arxiv.org/abs/1911.09516v1
核心解析:
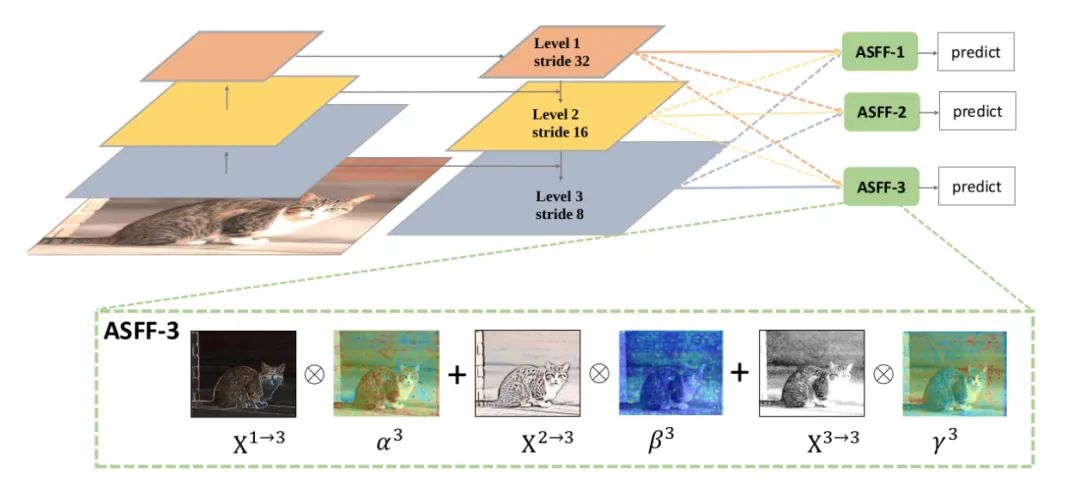
为了更加充分的利用高层语义特征和底层细粒度特征,很多网络都会采用FPN的方式输出多层特征,但是它们都多用concat或者element-wise这种融合方式,本论文认为这样不能充分利用不同尺度的特征,所以提出了Adaptively Spatial Feature Fusion,即自适应特征融合方式。FPN输出的特征图经过下面两部分的处理:
Feature Resizing:特征图的尺度不同无法进行element-wise融合,因此需要进行resize。对于上采样:首先利用1X1卷积进行通道压缩,然后利用插值的方法上采样特征图。对于1/2的下采样:利用stride=2的3X3卷积同时进行通道压缩和特征图缩小。对于1/4的下采样:在stride=2的3X3的卷积之前插入tride=2的maxpooling。
Adaptive Fusion:特征图自适应融合,公式如下
其中x n→l表示在(i,j)位置的特征向量,来自n特征图,经过上述resize到l尺度。Alpha。Beta,gamma为空间注意力权重,经过softmax处理,如下:
代码解析:
class ASFF(nn.Module):def __init__(self, level, rfb=False):super(ASFF, self).__init__()self.level = level# 输入的三个特征层的channels, 根据实际修改self.dim = [512, 256, 256]self.inter_dim = self.dim[self.level]# 每个层级三者输出通道数需要一致if level==0:self.stride_level_1 = conv_bn_relu(self.dim[1], self.inter_dim, 3, 2)self.stride_level_2 = conv_bn_relu(self.dim[2], self.inter_dim, 3, 2)self.expand = conv_bn_relu(self.inter_dim, 1024, 3, 1)elif level==1:self.compress_level_0 = conv_bn_relu(self.dim[0], self.inter_dim, 1, 1)self.stride_level_2 = conv_bn_relu(self.dim[2], self.inter_dim, 3, 2)self.expand = conv_bn_relu(self.inter_dim, 512, 3, 1)elif level==2:self.compress_level_0 = conv_bn_relu(self.dim[0], self.inter_dim, 1, 1)if self.dim[1] != self.dim[2]:self.compress_level_1 = conv_bn_relu(self.dim[1], self.inter_dim, 1, 1)self.expand = add_conv(self.inter_dim, 256, 3, 1)compress_c = 8 if rfb else 16self.weight_level_0 = conv_bn_relu(self.inter_dim, compress_c, 1, 1)self.weight_level_1 = conv_bn_relu(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = conv_bn_relu(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c*3, 3, 1, 1, 0)# 尺度大小 level_0 < level_1 < level_2def forward(self, x_level_0, x_level_1, x_level_2):# Feature Resizing过程if self.level==0:level_0_resized = x_level_0level_1_resized = self.stride_level_1(x_level_1)level_2_downsampled_inter =F.max_pool2d(x_level_2, 3, stride=2, padding=1)level_2_resized = self.stride_level_2(level_2_downsampled_inter)elif self.level==1:level_0_compressed = self.compress_level_0(x_level_0)level_0_resized =F.interpolate(level_0_compressed, 2, mode='nearest')level_1_resized =x_level_1level_2_resized =self.stride_level_2(x_level_2)elif self.level==2:level_0_compressed = self.compress_level_0(x_level_0)level_0_resized =F.interpolate(level_0_compressed, 4, mode='nearest')if self.dim[1] != self.dim[2]:level_1_compressed = self.compress_level_1(x_level_1)level_1_resized = F.interpolate(level_1_compressed, 2, mode='nearest')else:level_1_resized =F.interpolate(x_level_1, 2, mode='nearest')level_2_resized =x_level_2# 融合权重也是来自于网络学习level_0_weight_v = self.weight_level_0(level_0_resized)level_1_weight_v = self.weight_level_1(level_1_resized)level_2_weight_v = self.weight_level_2(level_2_resized)levels_weight_v = torch.cat((level_0_weight_v, level_1_weight_v,level_2_weight_v),1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1) # alpha产生# 自适应融合fused_out_reduced = level_0_resized * levels_weight[:,0:1,:,:]+\level_1_resized * levels_weight[:,1:2,:,:]+\level_2_resized * levels_weight[:,2:,:,:]out = self.expand(fused_out_reduced)return out
结语
本文盘点了近年来比较精巧而又实用的CNN插件,希望大家活学活用,用在自己的实际项目中。
往期精彩: