
KUOKUO的物理小游戏(三)
摘要
时间过的真快,阔阔工作之余录制的物理小游戏视频教程也已经更新到了14集!可能这就是对技术的热爱吧!本文就对教程做下阶段性的总结!
正文
使用版本
CocosCreator 版本 2.3.4
按钮动作&工具类Util(第5集)
按钮的动作我没有使用按钮组件,而是使用了节点事件监听;使用解构简化事件类型的书写:
const { TOUCH_START, TOUCH_END, TOUCH_CANCEL } = cc.Node.EventTypethis.startButton.on(TOUCH_START, () => {// 改变按钮节点的 scale}, this)
改变节点的动作可以封装到一个工具类里:
export class Util {static clickDownTween(node: cc.Node | undefined) {if (!node) { return }cc.tween(node).to(0.1, { scale: 0.9 }).start()}static clickUpTween(node: cc.Node | undefined) {if (!node) { return }cc.tween(node).to(0.1, { scale: 1 }).start()}}
优化后的代码:
this.startButton.on(TOUCH_START, () => {Util.clickDownTween(this.startButton)}, this)
动作后回调(第6集)
触摸开始是让节点缩放,松手是放大回正常尺寸,但是如果不等动作完成后触发事件,会出现事件触发时,按钮还在进行放大的现象。理应在动作结束后进行事件的触发,对 Util.clickUpTween() 进行改造:
static clickUpTween(node: cc.Node | undefined, callback?: () => void) {if (!node) { return }cc.tween(node).to(0.1, { scale: 1 }).call(() => {callback && callback()}).start()}
使用:
this.startButton.on(TOUCH_END, () => {Util.clickUpTween(this.startButton, () => {uiManager.gameStart()})}, this)
uiMap与枚举(第7集)
我们有 6 个 UI 要进行管理,每个 UI 都应该有显示与隐藏的方法,故抽出其共有属性与方法,实现一个 UIBase,让 6 个 UI 脚本去继承 UIBase,然后要对于实例化后的进行管理,采用了一个 map 数据结构:
private uiMap = new Map() UIType 是为了方便使用的枚举:
export enum UIType {ControlPanel,LevelInfo,LevelSelect,StartMenu,WinPanel,LossPanel}
关卡选择界面与逻辑(第8-9集)
关卡选择界面主要涉及一个列表,我这里距离了六关,也可以多放些使用 Scrollview 做成滚动的。如何识别每个关卡按钮,可以使用下标的形式,在创建时就按照顺序,这样从上到下就是对于 node.children 这个数组的下标:
button.on(TOUCH_END, () => {Util.clickUpTween(button, () => {// 从 1 开始const level = index + 1// 传入参数uiManager.gameStart(level)})}, this)
轮盘限位相似三角形原理(第10集)
轮盘这里注意两点,一个是触摸事件放在背景上,区域大点,方便定位;一个是限位处理,设置一个半径,如果手指触点到中心位置距离大于半径,根据相似原理乘以这个比例的倒数就会回到半径这个长度,然后把 x 和 y 乘以这个比率就是位置:
limitMidNodePos(pos: cc.Vec2): cc.Vec2 {const R = 130// 取当前位置长度,(x,y)=>lenconst len = pos.mag()// 计算 len 与 R 的关系,是内部还是外部,在外部,利用比例,限制回区域const ratio = len > R ? R / len : 1return cc.v2(pos.x * ratio, pos.y * ratio)}
食物刚体旋转位移控制逻辑(第11-13集)
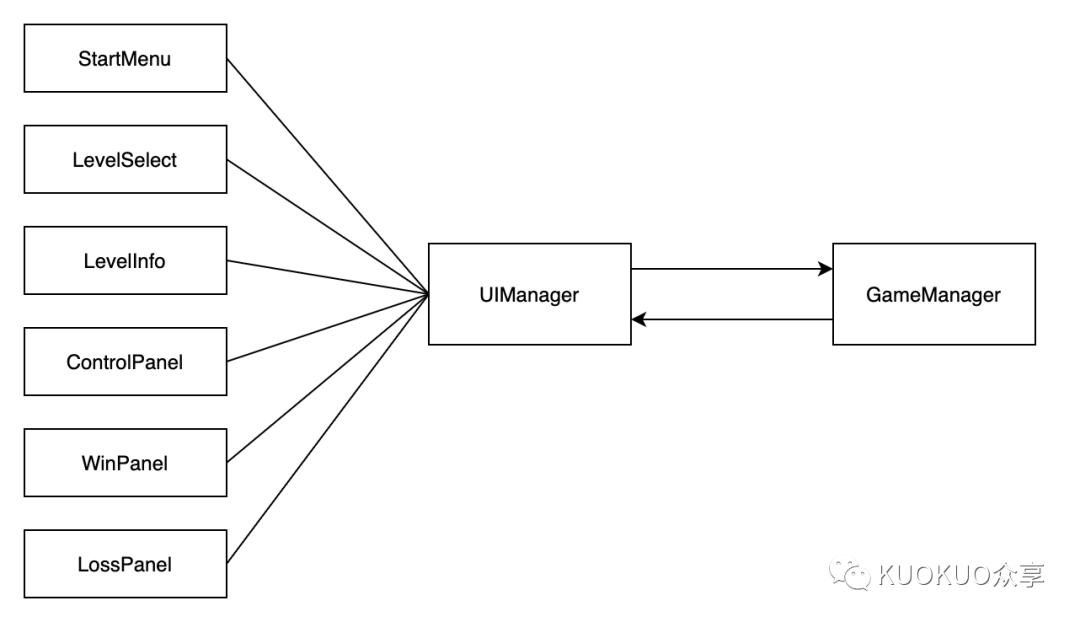
为了逻辑清晰,所有 UI 由 UIManager 管理,然后由其负责与 GameManager 通讯:
简单封装物理模块(第14集)
对于物理模块,封装这么五个方法:openPhysicsSystem() closePhysicsSystem() setRigidBodyStatic() setRigidBodyDynamic() setRigidBodyLinearVelocity() 顾名思义,分别是:开启物理系统、关闭物理系统、设置一个节点上的刚体类型为静态、设置一个节点上的刚体类型为动态、设置一个节点上的刚体线速度,以下为具体实现,都是比较简单的封装:
export class PhysicsManager {static openPhysicsSystem() {cc.director.getPhysicsManager().enabled = true}static closePhysicsSystem() {cc.director.getPhysicsManager().enabled = false}static setRigidBodyStatic(node: cc.Node) {const body = node.getComponent(cc.RigidBody)body.type = cc.RigidBodyType.Static}static setRigidBodyDynamic(node: cc.Node) {const body = node.getComponent(cc.RigidBody)body.type = cc.RigidBodyType.Dynamic}static setRigidBodyLinearVelocity(node: cc.Node, v: cc.Vec2) {const body = node.getComponent(cc.RigidBody)body.linearVelocity = v}}
结语
KUOKUO 会坚持更新视频哦,哔哩哔哩求关注,视频链接为:
https://www.bilibili.com/video/BV1ck4y167mR
2020!我们一起进步!O(∩_∩)O~~