
OpenVINO实时人脸表面3D点云提取
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自|OpenCV学堂
人脸3D点云提取网络

2019出现的一个可以在移动端实时运行的人脸3D表面提取模型-FaceMesh,被很多移动端AR应用作为底层算法实现人脸检测与人脸3D点云生成。相关的论文标题为:
《Real-time Facial Surface Geometry from Monocular Video on Mobile GPUs》github有pytorch版本的实现地址如下:
https://github.com/thepowerfuldeez/facemesh.pytorch已经提供了预训练模型文件pth,可以用Netron打开查看。它的输入与输出显示截图如下:
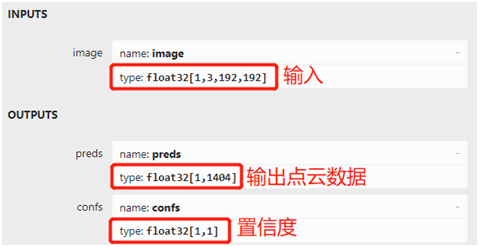
图-2
最终输出的点云数据是468个3D坐标人脸点云坐标,输入人脸的ROI区域,大小为192x192。使用Pytorch支持的脚本可以把该模型转换为ONNX格式模型,转换的脚本与代码如下:
from facemesh import FaceMeshimport torchnet = FaceMesh()net.load_weights("facemesh.pth")torch.onnx.export(net, torch.randn(1, 3, 192, 192, device='cpu'), "facemesh.onnx",input_names=("image", ), output_names=("preds", "confs"), opset_version=9)
这样我们就得到了ONNX版本的模型文件。
OpenVINO调用facemesh模型
OpenVINO2020.x版本以后均支持直接读取ONNX格式模型文件,实现模型加载与推理调用。这里以OpenVINO2021.2版本为例。我们的基本思路是首先通过OpenVINO自带的人脸检测模型实现人脸检测,然后截取人脸ROI区域再送到facemesh模型中实现人脸3D表面点云468个点提取。人脸检测这里我们选择了OpenVINO自带的face-detection-0202模型文件,该模型是基于MobileNet SSDv版本,输入格式如下:
NCHW = 1x3x384x384输出格式为:
1x1xNx7通道的顺序是:BGR
从图-2得知人脸3D点云提取模型facemesh的输入格式为1x3x192x192,输出层有两个分别是preds与confs,其中preds是点云数据,confs表示置信度。preds的1404表示的是468个点每个点的三维坐标,总计468x3=1404。代码演示部分的步骤与运行结果详解说明与步骤。加载模型与获取输入与输出信息:
# 加载人脸检测模型
net = ie.read_network(model=model_xml, weights=model_bin)
input_blob = next(iter(net.input_info))
out_blob = next(iter(net.outputs))
# 人脸检测的输入格式
n, c, h, w = net.input_info[input_blob].input_data.shape
print(n, c, h, w)
exec_net = ie.load_network(network=net, device_name="CPU")
# 加载人脸3D点云预测模型
face_mesh_onnx = "facemesh.onnx"
mesh_face_net = ie.read_network(model=face_mesh_onnx)
# 输入格式
em_input_blob = next(iter(mesh_face_net.input_info))
en, ec, eh, ew = mesh_face_net.input_info[em_input_blob].input_data.shape
print(en, ec, eh, ew)
em_exec_net = ie.load_network(network=mesh_face_net, device_name="CPU")人脸检测与获取人脸ROI然后提取人脸3D点云数据,然后显示:
# 设置输入图像与人脸检测模型推理预测
image = cv.resize(frame, (w, h))
image = image.transpose(2, 0, 1)
inf_start = time.time()
res = exec_net.infer(inputs={input_blob: [image]})
ih, iw, ic = frame.shape
res = res[out_blob]
# 解析人脸检测,获取ROI
for obj in res[0][0]:
if obj[2] > 0.75:
xmin = int(obj[3] * iw)
ymin = int(obj[4] * ih)
xmax = int(obj[5] * iw)
ymax = int(obj[6] * ih)
if xmin < 0:
xmin = 0
if ymin < 0:
ymin = 0
if xmax >= iw:
xmax = iw - 1
if ymax >= ih:
ymax = ih - 1
# 截取人脸ROI,提取3D表面点云数据
roi = frame[ymin:ymax, xmin:xmax, :]
roi_img = cv.resize(roi, (ew, eh))
roi_img = np.float32(roi_img) / 127.5
roi_img = roi_img.transpose(2, 0, 1)
em_res = em_exec_net.infer(inputs={em_input_blob: [roi_img]})
# 转换为468个3D点云数据, 然后显示
prob_mesh = em_res["preds"]
prob_mesh= np.reshape(prob_mesh, (-1, 3))
cv.rectangle(frame, (xmin, ymin), (xmax, ymax), (0, 255, 255), 2, 8)
sx, sy= ew / roi.shape[1], eh / roi.shape[0]
for i in range(prob_mesh.shape[0]):
x, y = int(prob_mesh[i, 0] / sx), int(prob_mesh[i, 1] / sy)
cv.circle(frame, (xmin + x, ymin + y), 1, (0, 0, 255), 1)
# 计算帧率与显示点云结果
inf_end = time.time() - inf_start
cv.putText(frame, "infer time(ms): %.3f, FPS: %.2f" % (inf_end * 1000, 1 / inf_end), (10, 50),
cv.FONT_HERSHEY_SIMPLEX, 1.0, (255, 0, 255), 2, 8)
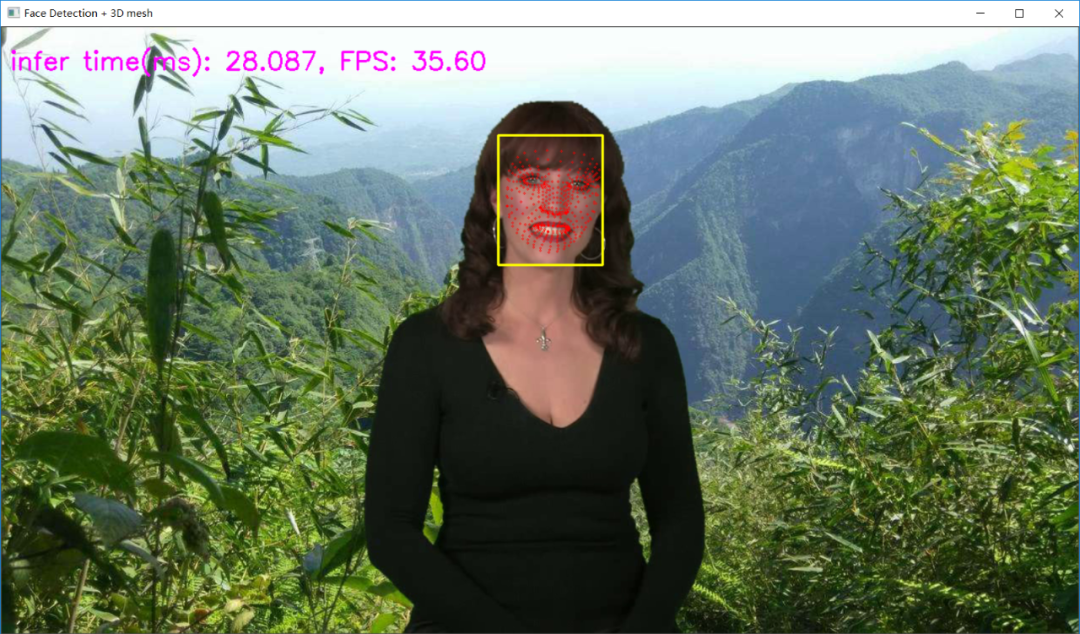
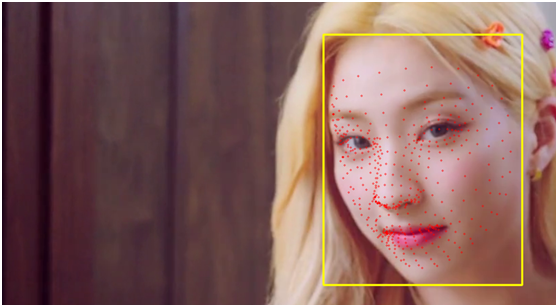
cv.imshow("Face Detection + 3D mesh", frame)运行显示结果如下:

下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~