
扔掉源码,15张图带你彻底理解java AQS
java中AQS是AbstractQueuedSynchronizer类,AQS依赖FIFO队列来提供一个框架,这个框架用于实现锁以及锁相关的同步器,比如信号量、事件等。
在AQS中,主要有两部分功能,一部分是操作state变量,第二部分是实现排队和阻塞机制。
注意,AQS并没有实现任何同步接口,它只是提供了类似acquireInterruptible的方法,调用这些方法可以实现锁和同步器。
管程模型
java使用MESA管程模型来管理类的成员变量和方法,让这个类的成员变量和方法的操作是线程安全的。下图是MESA管程模型,里面除了定义共享变量外,还定义了条件变量和条件变量等待队列:
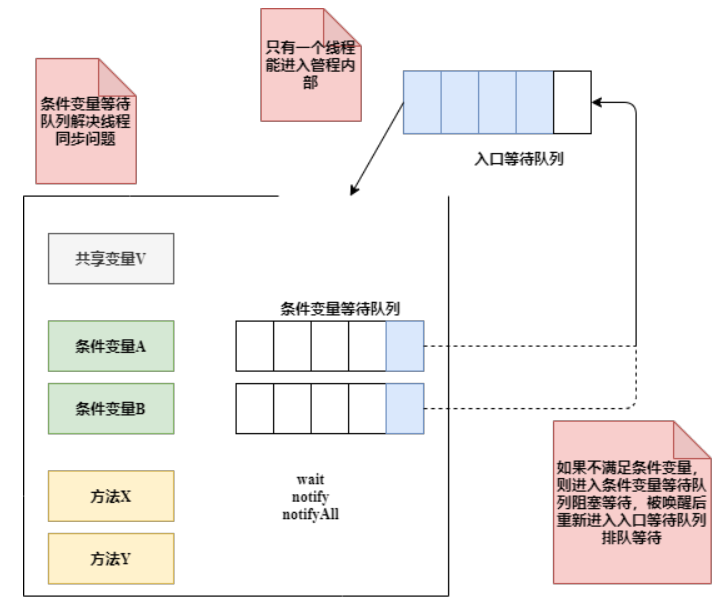
java中的MESA模型有一点改进,就是管程内部只有一个条件变量和一个等待队列。下图是AQS的管程模型:
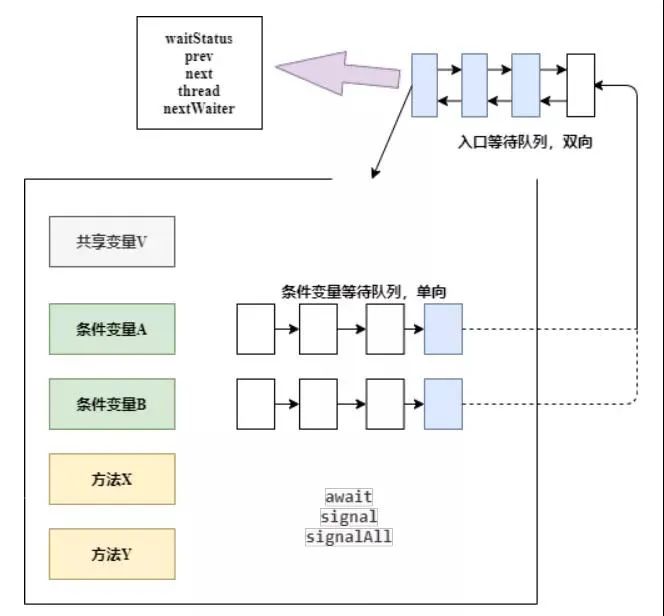
AQS的管程模型依赖AQS中的FIFO队列实现入口等待队列,而ConditionObject则实现了条件队列,这个队列可以创建多个。本文主要讲解入口等待队列获取锁的几种方式。参考1[1]
获取独占锁
独占, 忽略interrupts
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
这里的tryAcquire是抽象方法,有AQS的子类来实现,因为每个子类实现的锁是不一样的。
入队
上面的代码可以看到,获取锁失败后,会先执行addWaiter方法加入队列,然后执行acquireQueued方法自旋地获取锁直到成功。
addWaiter代码逻辑如下图,简单说就是把node入队,入队后返回node参数给acquireQueued方法:
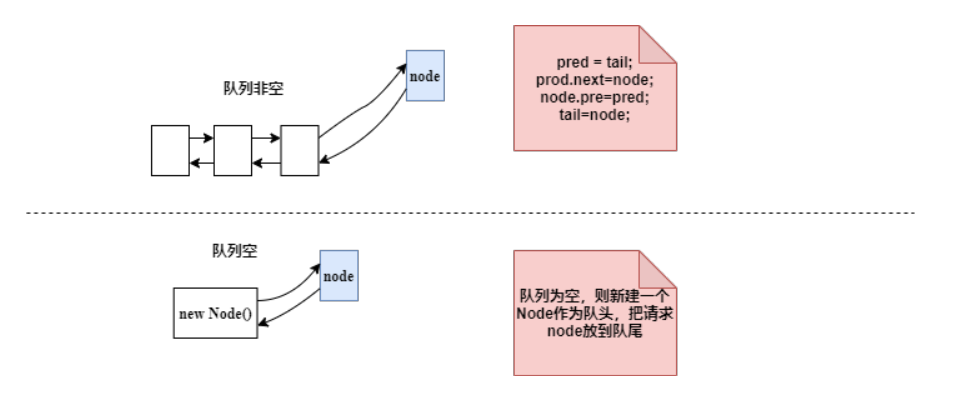
这里有一个点需要注意,如果队列为空,则新建一个Node作为队头。
入队后获取锁
acquireQueued自旋获取锁逻辑如下图:
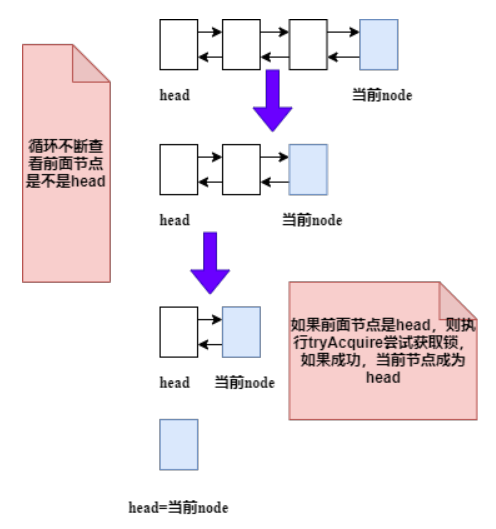
这里有几个细节:
1.waitStatus
CANCELLED(1):当前节点取消获取锁。当等待超时或被中断(响应中断),会触发变更为此状态,进入该状态后节点状态不再变化。 SIGNAL(-1):后面节点等待当前节点唤醒。 CONDITION(-2):Condition中使用,当前线程阻塞在Condition,如果其他线程调用了Condition的signal方法,这个结点将从等待队列转移到同步队列队尾,等待获取同步锁。 PROPAGATE(-3):共享模式,前置节点唤醒后面节点后,唤醒操作无条件传播下去。 0:中间状态,当前节点后面的节点已经唤醒,但是当前节点线程还没有执行完成。
2.获取锁失败后挂起
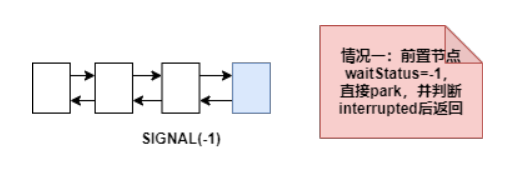
如果前置节点不是头节点,或者前置节点是头节点但当前节点获取锁失败,这时当前节点需要挂起,分三种情况,
前置节点waitStatus=-1,如下图:
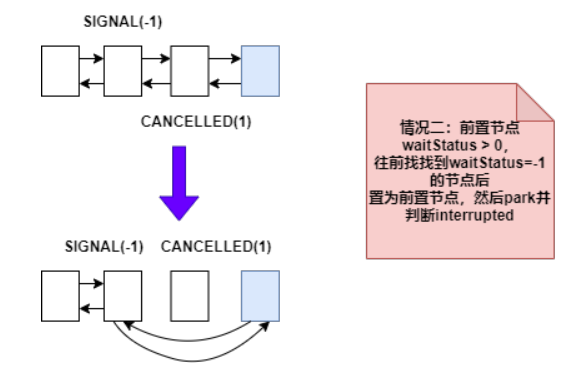
前置节点waitStatus > 0,如下图:
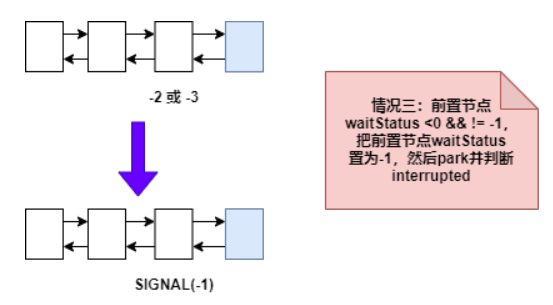
前置节点waitStatus < 0 但不等于 -1,如下图:
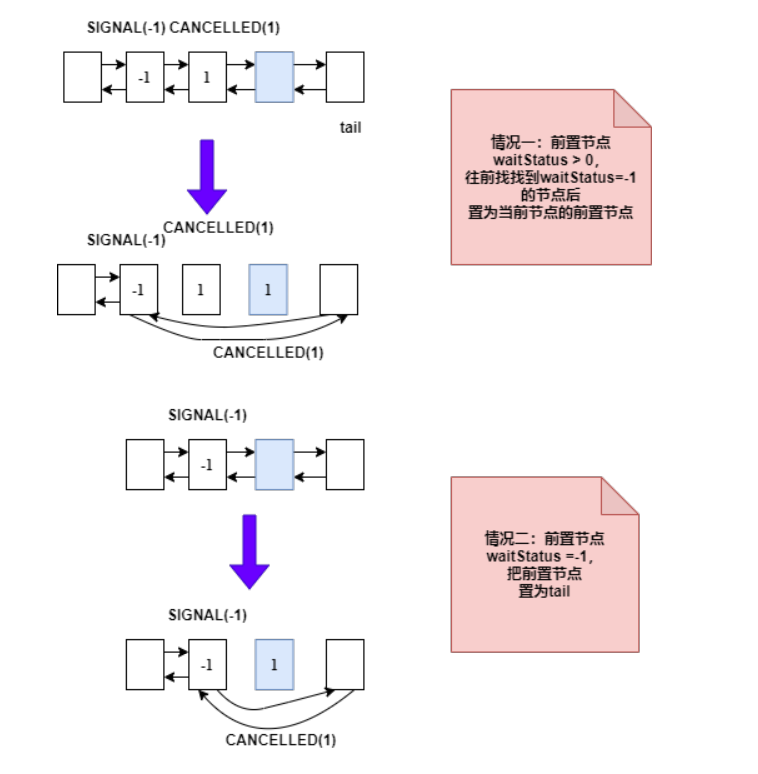
3.取消获取锁
如果获取锁抛出异常,则取消获取锁,如果当前节点是tail节点,分两种情况如下图:
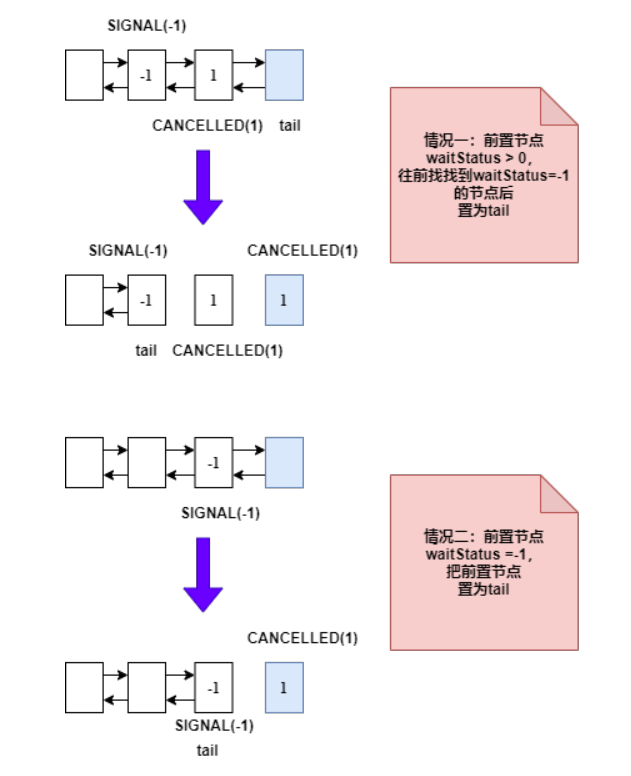
如果当前节点不是tail节点,也分两种情况,如下图:
4.对中断状态忽略
5.如果前置节点的状态是 0 或 PROPAGATE,会被当前节点自旋过程中更新成-1,以便之后通知当前节点。
独占 + 响应中断
对应方法acquireInterruptibly(int arg)。
跟忽略中断(acquire方法)不同的是要响应中断,下面两个地方响应中断:
获取锁之前会检查当前线程是否中断。 获取锁失败入队,在队列中自旋获取锁的过程中也会检查当前线程是否中断。
如果检查到当前线程已经中断,则抛出InterruptedException,当前线程退出。
独占 + 响应中断 + 考虑超时
对应方法tryAcquireNanos(int arg, long nanosTimeout)。
这个方法具备了独占 + 响应中断 + 超时的功能,下面2个地方要判断是否超时:
自旋获取锁的过程中每次获取锁失败都要判断是否超时 获取锁失败park之前要判断超时时间是否大于自旋的阈值时间**(spinForTimeoutThreshold = 1ns)**
另外,park线程的操作使用parkNanos传入阻塞时间。
释放独占锁
独占锁释放分两步:释放锁,唤醒后继节点。
释放锁的方法 tryRelease 是抽象的,由子类去实现。
我们看一下唤醒后继节点的逻辑,首先需要满足两个条件:
head节点不等于 null head节点waitStatus不等于0
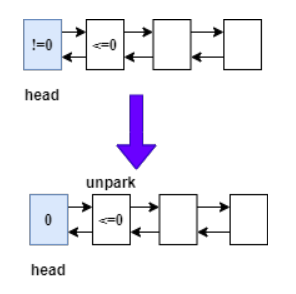
这里有两种情况(在方法unparkSuccessor):
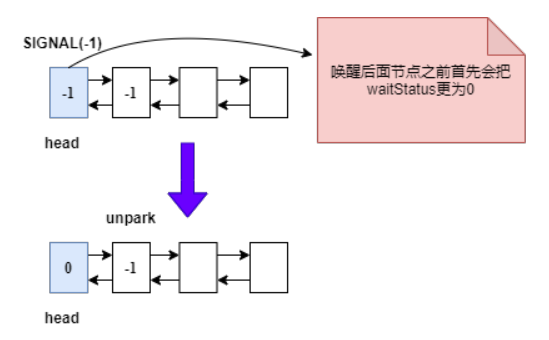
情况一,后继节点waitStatus <= 0,直接唤醒后继节点,如下图:
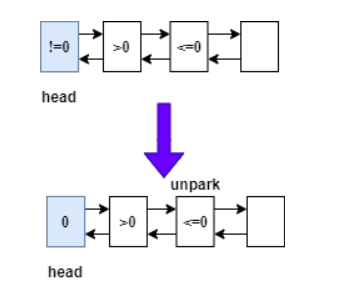
情况二:后继节点为空或者waitStatus > 0,从后往前查找最接近当前节点的节点进行唤醒,如下图:
获取共享锁
之前我们讲了独占锁,这一小节我们谈共享锁,有什么不同呢?
共享,忽略interrupts
对应方法acquireShared,代码如下:
public final void acquireShared(int arg) {
if (tryAcquireShared(arg) < 0)
doAcquireShared(arg);
}
tryAcquireShared
这里获取锁使用的方法是tryAcquireShared,获取的是共享锁。获取共享锁跟获取独占锁不同的是,会返回一个整数值,说明如下:
返回负数:获取锁失败。 返回0:获取锁成功但是之后再由线程来获取共享锁时就会失败。 返回正数:获取锁成功而且之后再有线程来获取共享锁时也可能会成功。所以需要把唤醒操作传播下去。
tryAcquireShared获取锁失败后(返回负数),就需要入队后自旋获取,也就是执行方法doAcquireShared。
doAcquireShared
怎么判断队列中等待节点是在等待共享锁呢?nextWaiter == SHARED,这个参数值是入队新建节点的时候构造函数传入的。
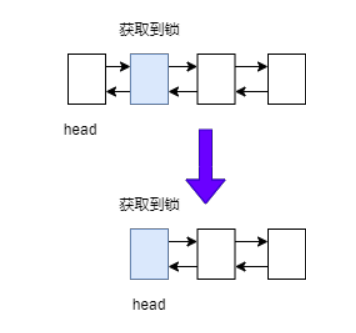
自旋过程中,如果获取锁成功(返回正数),首先把自己设置成新的head节点,然后把通知传播下去。如下图:net/anlian523/article/details/106319294/
之后会唤醒后面节点并保证唤醒操作可以传播下去。但是需要满足四个条件中的一个:
tryAcquireShared返回值大于0,有多余的锁,可以继续唤醒后继节点 旧的head节点waitStatus < 0,应该是其他线程释放共享锁过程中把它的状态更新成了-3 新的hade节点waitStatus < 0,只要不是tail节点,就可能是-1
这里会造成不必要的唤醒,因为唤醒后获取不到锁只能继续入队等待
当前节点的后继节点是空或者非空但正在等待共享锁
唤醒后面节点的操作,其实就是释放共享锁,对应方法是doReleaseShared,见释放共享锁一节。
共享 + 响应中断
对应方法acquireSharedInterruptibly(int arg)。
跟共享忽略中断(acquireShared方法)不同的是要响应中断,下面两个地方响应中断:
获取锁之前会检查当前线程是否中断。 获取锁失败入队,在队列中自旋获取锁的过程中也会检查当前线程是否中断。
如果检查到当前线程已经中断,则抛出InterruptedException,当前线程退出。
共享 + 响应中断 + 考虑超时
对应方法tryAcquireSharedNanos(int arg, long nanosTimeout)。
这个方法具备了共享 + 响应中断 + 超时的功能,下面2个地方要判断是否超时:
自旋获取锁的过程中每次获取锁失败都要判断是否超时 获取锁失败park之前要判断超时时间是否大于自旋的阈值时间(spinForTimeoutThreshold = 1ns)
另外,park线程的操作使用parkNanos传入阻塞时间。
释放共享锁
释放共享锁代码如下:
public final boolean releaseShared(int arg) {
if (tryReleaseShared(arg)) {
doReleaseShared();
return true;
}
return false;
}
首先尝试释放共享锁,tryReleaseShared代码由子类来实现。释放成功后执行AQS中的doReleaseShared方法,是一个自旋操作。
自旋的条件是队列中至少有两个节点,这里分三种情况。
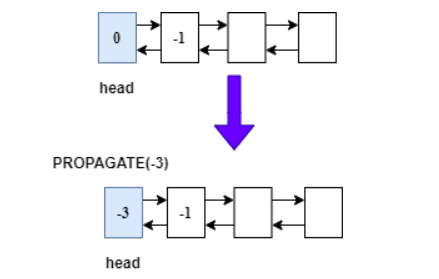
情况一:当前节点waitStatus是-1,如下图:
情况二:当前节点waitStatus是0(被其他线程更xin新成了中间状态),如下图:
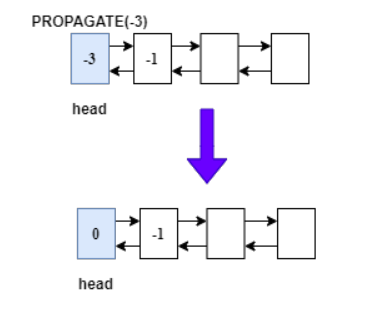
情况三:当前节点waitStatus是-3,为什么会这样呢?需要解释一下,head节点唤醒后继节点之前waitStatus已经被更新中间态0了,唤醒后继节点动作还没有执行,又被其他线程更成了-3,也就是其他线程释放锁执行了上面情况二。这时需要先把waitStatus再更成0(在方法unparkSuccessor),如下图:
抽象方法
上面的讲解可以看出,如果要基于AQS来实现并发锁,可以根据需求重写下面四个方法来实现,这四个方法在AQS中没有具体实现:
tryAcquire(int arg):获取独占锁 tryRelease(int arg):释放独占锁 tryAcquireShared(int arg):获取共享锁 tryReleaseShared(int arg):释放共享锁 参考2[2]
AQS的子类需要重写上面的方法来修改state值,并且定义获取锁或者释放锁时state值的变化。子类也可以定义自己的state变量,但是只有更新AQS中的state变量才会对同步起作用。
还有一个判断当前线程是否持有独占锁的方法 isHeldExclusively,也可以供子类重写后使用。
获取/释放锁的具体实现放到下篇文章讲解。
总结
AQS使用FIFO队列实现了一个锁相关的并发器模板,可以基于这个模板来实现各种锁,包括独占锁、共享锁、信号量等。
AQS中,有一个核心状态是waitStatus,这个代表节点的状态,决定了当前节点的后续操作,比如是否等待唤醒,是否要唤醒后继节点。
·············· END ··············
欢迎大家加我微信,围观朋友圈,做点赞之交,一起进步。想要进技术交流群的朋友,加我微信回复进群。
参考资料
参考1: https://blog.csdn.net/it_lihongmin/article/details/109609023
[2]参考2: https://mp.weixin.qq.com/s/u_0fAgTUtC0YUz-SIxlL7Q