
5分钟掌握 Python 随机爬山算法

爬山是用于功能优化的随机局部搜索算法。 如何在Python中从头开始实现爬山算法。 如何应用爬山算法并检查算法结果。
爬山算法 爬山算法的实现 应用爬山算法的示例
# objective function
def objective(x):
return 0
# define range for input
bounds = asarray([[-5.0, 5.0]])
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
“ n_iterations”的算法的预定义迭代次数,例如100或1,000。# run the hill climb
for i in range(n_iterations):
“ step_size”参数,该参数相对于搜索空间的边界。我们将采用高斯分布的随机步骤,其中均值是我们的当前点,标准偏差由“ step_size”定义。这意味着大约99%的步骤将在当前点的(3 * step_size)之内。# take a step
candidate = solution + randn(len(bounds)) * step_size
# take a step
candidate = solution + rand(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size):
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
for i in range(n_iterations):
# take a step
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solution, solution_eval]
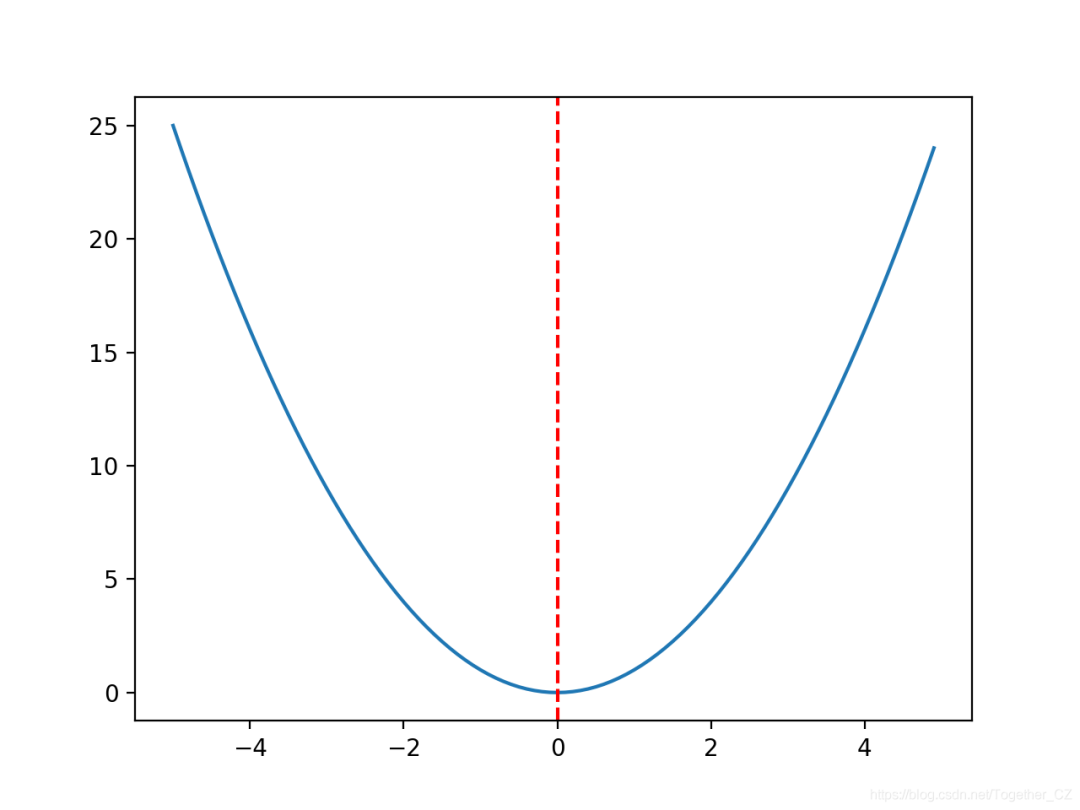
f(0.0)= 0.0处的最佳值。# convex unimodal optimization function
from numpy import arange
from matplotlib import pyplot
# objective function
def objective(x):
return x[0]**2.0
# define range for input
r_min, r_max = -5.0, 5.0
# sample input range uniformly at 0.1 increments
inputs = arange(r_min, r_max, 0.1)
# compute targets
results = [objective([x]) for x in inputs]
# create a line plot of input vs result
pyplot.plot(inputs, results)
# define optimal input value
x_optima = 0.0
# draw a vertical line at the optimal input
pyplot.axvline(x=x_optima, ls='--', color='red')
# show the plot
pyplot.show()
# seed the pseudorandom number generator
seed(5)
n_iterations = 1000
# define the maximum step size
step_size = 0.1
# perform the hill climbing search
best, score = hillclimbing(objective, bounds, n_iterations, step_size)
print('Done!')
print('f(%s) = %f' % (best, score))
# hill climbing search of a one-dimensional objective function
from numpy import asarray
from numpy.random import randn
from numpy.random import rand
from numpy.random import seed
# objective function
def objective(x):
return x[0]**2.0
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size):
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
for i in range(n_iterations):
# take a step
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solution, solution_eval]
# seed the pseudorandom number generator
seed(5)
# define range for input
bounds = asarray([[-5.0, 5.0]])
# define the total iterations
n_iterations = 1000
# define the maximum step size
step_size = 0.1
# perform the hill climbing search
best, score = hillclimbing(objective, bounds, n_iterations, step_size)
print('Done!')
print('f(%s) = %f' % (best, score))
>1 f([-2.74290923]) = 7.52355
>3 f([-2.65873147]) = 7.06885
>4 f([-2.52197291]) = 6.36035
>5 f([-2.46450214]) = 6.07377
>7 f([-2.44740961]) = 5.98981
>9 f([-2.28364676]) = 5.21504
>12 f([-2.19245939]) = 4.80688
>14 f([-2.01001538]) = 4.04016
>15 f([-1.86425287]) = 3.47544
>22 f([-1.79913002]) = 3.23687
>24 f([-1.57525573]) = 2.48143
>25 f([-1.55047719]) = 2.40398
>26 f([-1.51783757]) = 2.30383
>27 f([-1.49118756]) = 2.22364
>28 f([-1.45344116]) = 2.11249
>30 f([-1.33055275]) = 1.77037
>32 f([-1.17805016]) = 1.38780
>33 f([-1.15189314]) = 1.32686
>36 f([-1.03852644]) = 1.07854
>37 f([-0.99135322]) = 0.98278
>38 f([-0.79448984]) = 0.63121
>39 f([-0.69837955]) = 0.48773
>42 f([-0.69317313]) = 0.48049
>46 f([-0.61801423]) = 0.38194
>48 f([-0.48799625]) = 0.23814
>50 f([-0.22149135]) = 0.04906
>54 f([-0.20017144]) = 0.04007
>57 f([-0.15994446]) = 0.02558
>60 f([-0.15492485]) = 0.02400
>61 f([-0.03572481]) = 0.00128
>64 f([-0.03051261]) = 0.00093
>66 f([-0.0074283]) = 0.00006
>78 f([-0.00202357]) = 0.00000
>119 f([0.00128373]) = 0.00000
>120 f([-0.00040911]) = 0.00000
>314 f([-0.00017051]) = 0.00000
Done!
f([-0.00017051]) = 0.000000
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size):
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
scores = list()
scores.append(solution_eval)
for i in range(n_iterations):
# take a step
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# keep track of scores
scores.append(solution_eval)
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solution, solution_eval, scores]
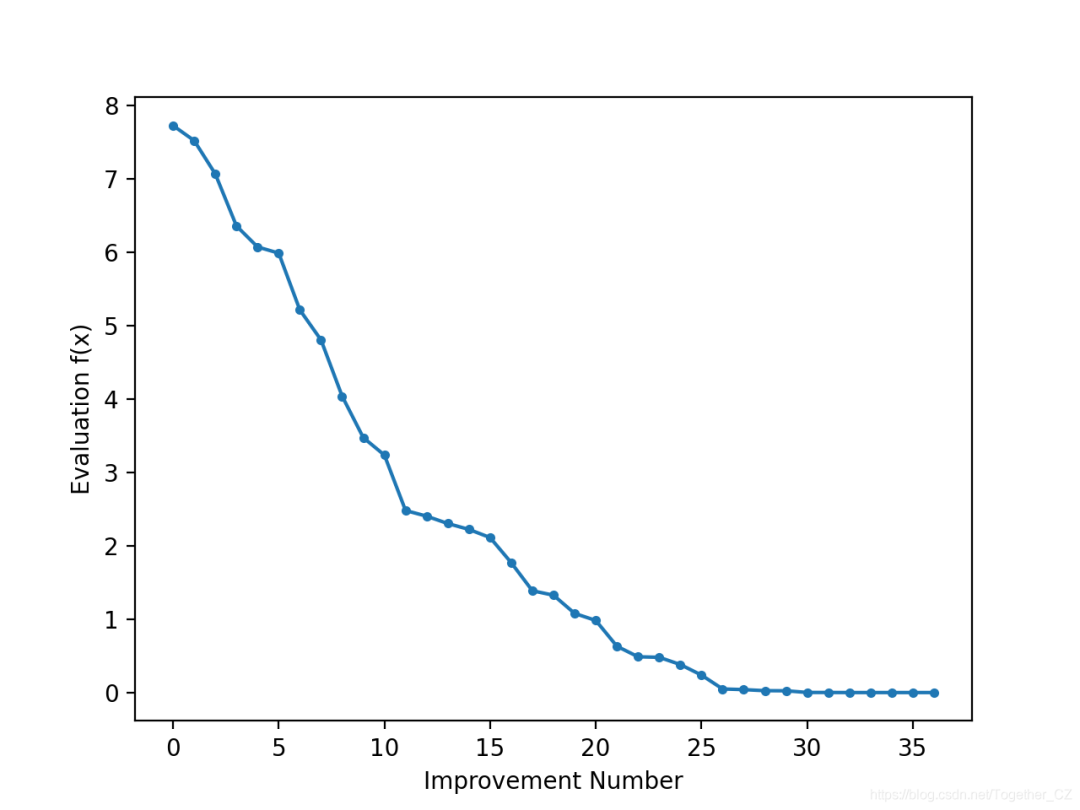
# line plot of best scores
pyplot.plot(scores, '.-')
pyplot.xlabel('Improvement Number')
pyplot.ylabel('Evaluation f(x)')
pyplot.show()
# hill climbing search of a one-dimensional objective function
from numpy import asarray
from numpy.random import randn
from numpy.random import rand
from numpy.random import seed
from matplotlib import pyplot
# objective function
def objective(x):
return x[0]**2.0
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size):
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
scores = list()
scores.append(solution_eval)
for i in range(n_iterations):
# take a step
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# keep track of scores
scores.append(solution_eval)
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solution, solution_eval, scores]
# seed the pseudorandom number generator
seed(5)
# define range for input
bounds = asarray([[-5.0, 5.0]])
# define the total iterations
n_iterations = 1000
# define the maximum step size
step_size = 0.1
# perform the hill climbing search
best, score, scores = hillclimbing(objective, bounds, n_iterations, step_size)
print('Done!')
print('f(%s) = %f' % (best, score))
# line plot of best scores
pyplot.plot(scores, '.-')
pyplot.xlabel('Improvement Number')
pyplot.ylabel('Evaluation f(x)')
pyplot.show()
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size):
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
solutions = list()
solutions.append(solution)
for i in range(n_iterations):
# take a step
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# keep track of solutions
solutions.append(solution)
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solution, solution_eval, solutions]
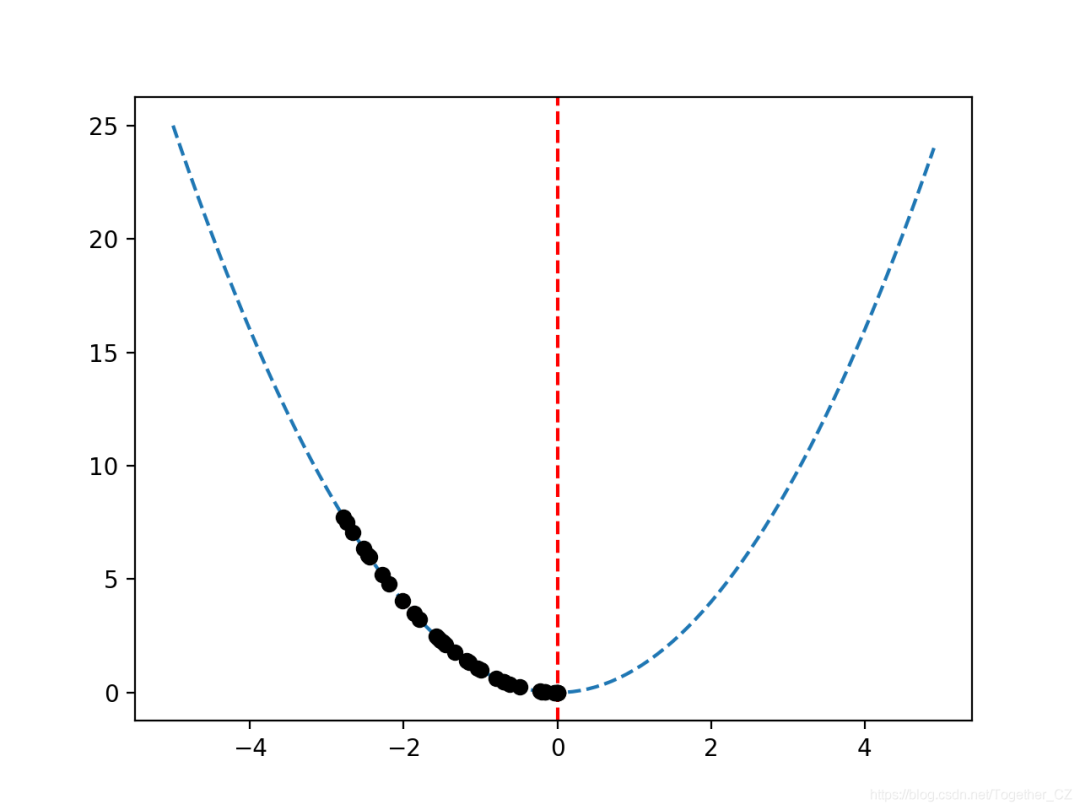
# sample input range uniformly at 0.1 increments
inputs = arange(bounds[0,0], bounds[0,1], 0.1)
# create a line plot of input vs result
pyplot.plot(inputs, [objective([x]) for x in inputs], '--')
# draw a vertical line at the optimal input
pyplot.axvline(x=[0.0], ls='--', color='red')
# plot the sample as black circles
pyplot.plot(solutions, [objective(x) for x in solutions], 'o', color='black')
# hill climbing search of a one-dimensional objective function
from numpy import asarray
from numpy import arange
from numpy.random import randn
from numpy.random import rand
from numpy.random import seed
from matplotlib import pyplot
# objective function
def objective(x):
return x[0]**2.0
# hill climbing local search algorithm
def hillclimbing(objective, bounds, n_iterations, step_size):
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# evaluate the initial point
solution_eval = objective(solution)
# run the hill climb
solutions = list()
solutions.append(solution)
for i in range(n_iterations):
# take a step
candidate = solution + randn(len(bounds)) * step_size
# evaluate candidate point
candidte_eval = objective(candidate)
# check if we should keep the new point
if candidte_eval <= solution_eval:
# store the new point
solution, solution_eval = candidate, candidte_eval
# keep track of solutions
solutions.append(solution)
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solution, solution_eval, solutions]
# seed the pseudorandom number generator
seed(5)
# define range for input
bounds = asarray([[-5.0, 5.0]])
# define the total iterations
n_iterations = 1000
# define the maximum step size
step_size = 0.1
# perform the hill climbing search
best, score, solutions = hillclimbing(objective, bounds, n_iterations, step_size)
print('Done!')
print('f(%s) = %f' % (best, score))
# sample input range uniformly at 0.1 increments
inputs = arange(bounds[0,0], bounds[0,1], 0.1)
# create a line plot of input vs result
pyplot.plot(inputs, [objective([x]) for x in inputs], '--')
# draw a vertical line at the optimal input
pyplot.axvline(x=[0.0], ls='--', color='red')
# plot the sample as black circles
pyplot.plot(solutions, [objective(x) for x in solutions], 'o', color='black')
pyplot.show()
作者:沂水寒城,CSDN博客专家,个人研究方向:机器学习、深度学习、NLP、CV
Blog: http://yishuihancheng.blog.csdn.net
赞 赏 作 者
更多阅读
特别推荐

点击下方阅读原文加入社区会员
评论