
特斯拉都搞不定,车路协同是无人驾驶的终极解决方案吗?

新智元报道
新智元报道
编辑:好困 桃子
【新智元导读】先是万亿,后是1.2万亿,特斯拉市值不断创下新高。放眼望去,整个车企都在积极拥抱无人驾驶。但是目前的技术面临着的诸多瓶颈,却不得不让人们重新思考无人驾驶的中国道路在哪里?

车路协同VS单车智能
车路协同VS单车智能


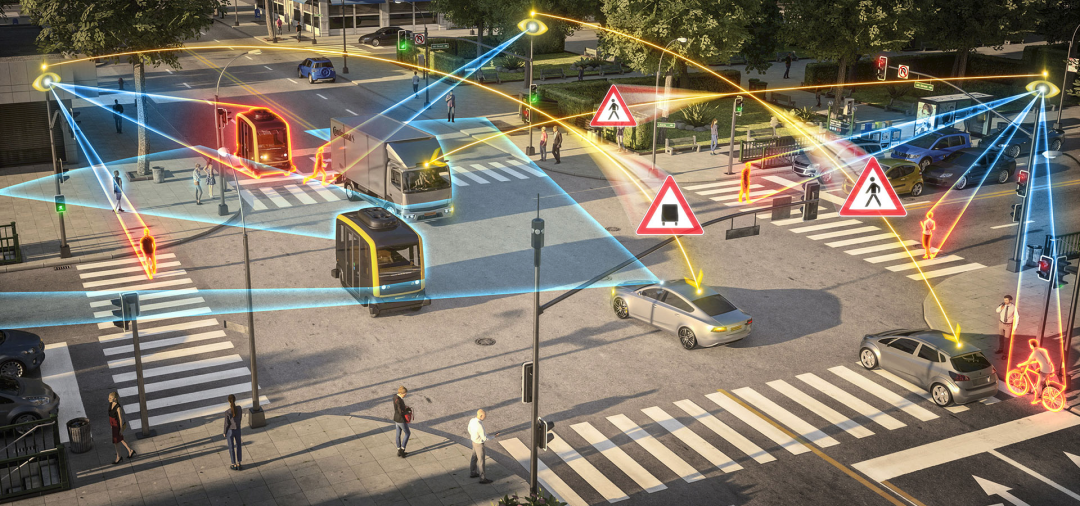
车路协同,顾名思义是由「车端」和「路端」两大关键部分组成,其实除了这两个看得见的部分外,还有看不见的“云端”来为车和路的协同配合来提供后台支持:
车端:可以联网且具有一定自动驾驶能力的车辆;
路端:包含智能感知设施(摄像头、毫米波雷达、激光雷达等)、路侧通信设施、计算控制设施(边缘计算节点等)等配套设备。
云端:包括计算平台和云控平台等后端平台,可以将车和路的信息进行实时收集、计算和处理,将车和路的协同能力调配到最优状态。
和单车智能仅靠车端来感知外界不同,「聪明的车」+「智慧的路」+「强大的云」,三者的协同结合将使得车路协同具备站得高、坐的稳、数据好、算得快的这几个技术优点。

站得「高」、看得远的「上帝视角」


数量大、质量高的数据收集
在无人驾驶中,系统对数据的收集效率和收集质量是解决应用落地最为重要的因素:只有收集到庞大和高质量数据来进行分析和学习,才更使系统更精准地进行优化。
这也是兰德公司早在2016年就提出,「L4级无人驾驶车辆的量产需要测试177亿公里(110亿英里)以上才能实现」的原因——毕竟驾驶行为是涉及到“人命关天”的大事,哪怕在驾驶行为的处理中有0.1%的概率出现问题,都有可能会造成车毁人亡的大事故。
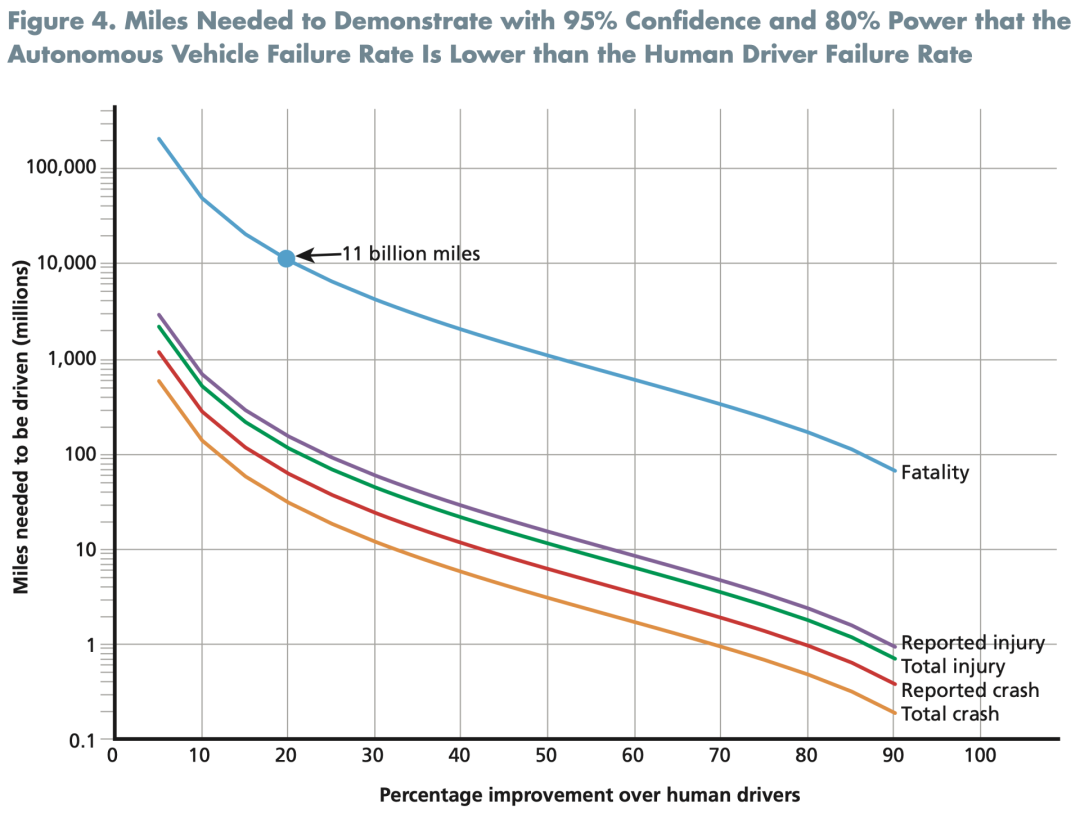
然而,在单车智能方案中,以Waymo为例,虽然背靠着谷歌这个大靠山,在投入了巨额的资金,十年的时间里才积累了3500万公里的真实路测数据,迟迟不能实现应用和落地。
这实际上是单车智能方案的共性问题:缓慢的数据收集能力使得学习能力变得缓慢;学习能力的缓慢也使得系统的优化提升变得缓慢;系统优化的缓慢导致了方案落地的缓慢。
比如,在2021年5月,面对着一个人类驾驶员很容易处理的情况,Waymo自动驾驶汽车却陷入了「三角锥难题」,以一己之力,连续数次堵住道路。出现这种情况的根本问题就是它从来没有遇到过这种情况,也从来没有解决这种情况的方案。

与此相对的则是车路协同方案在数据收集能力上的颠覆性的突破:除了收集「车」上的数据以外,还会以「路」为单位进行收集;除了收集无人车辆的行驶数据,还收集人类驾驶员的数据。
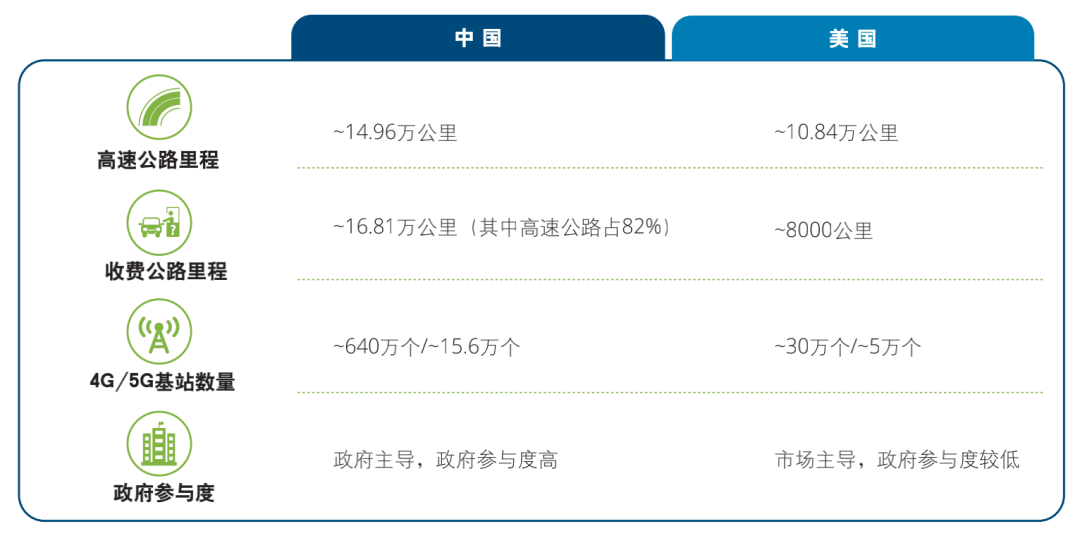
仅以苏州为例,在完成路端的改造后,在数据「量」上,全市公路里程1.2万公里,按450万辆汽车的真实行驶里程计算,每天可收集1.2亿公里的真实车辆行驶数据;在数据「质」上,「路端」的收集的数据不但全视角、可连续,而且还能够记录真实CornerCase发生的前因后。

大数据处理
算力大、计算快的「隐身英雄」
当然了,如此巨大的数据量也不是个善茬,带来的是对整个系统「算力」的极高要求。然而,单车智能搭载的芯片由于空间和功耗的限制,目前的算力最高只能达到1000+TOPS。 这是个什么概念? 
(来源:未来汽车日报) 从L3有条件的自动驾驶开始,车辆除了需要控制自身的转向和加速减速以外,还需要在行驶过程中对环境进行监测。 此时,车载芯片的算力起点就已经从L2的2Tops提升到了L3的24Tops。 进入到L4和L5阶段之后,还需要加入紧急事件触发接管机制,此时对算力的要求几乎是呈现「指数」级的上升,达到320TOPS和4000TOPS。 至少目前来看,单车智能在面对如此海量的数据时,只能选择「躺平」。 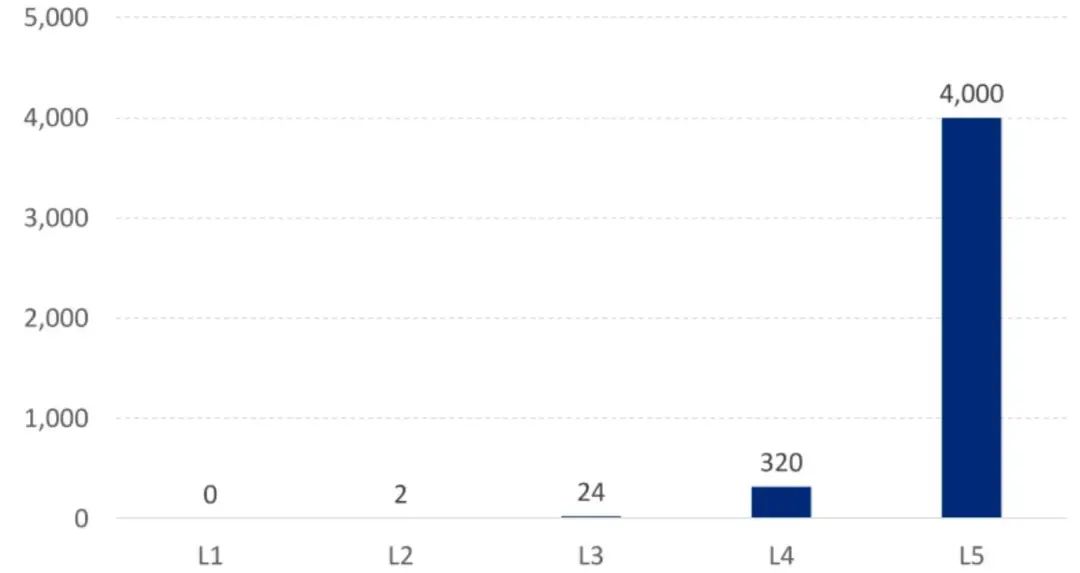
(来源:东兴证券研究所)
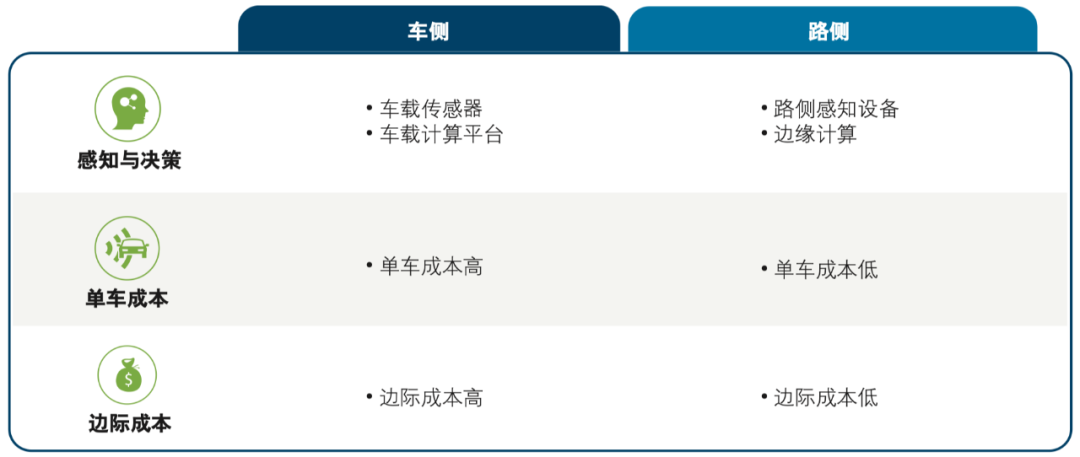
而相比来说,车路协同中的计算可以运用边缘计算和云计算技术,调用海量的算力来完成这些复杂运算,而不会受制于单车的算力。
不仅如此,车路协同算力设备部署更为稳定,不受行车规则的限制,5G通信可实时调用海量算力把车端路端算法互相反馈测试来验证结果。这些也都是单车智能在算力上所不具备的优势。
除了安全,还是安全
算力大、计算快的「隐身英雄」
除了安全,还是安全
这实际就是单车智能在安全问题上遇到的瓶颈。
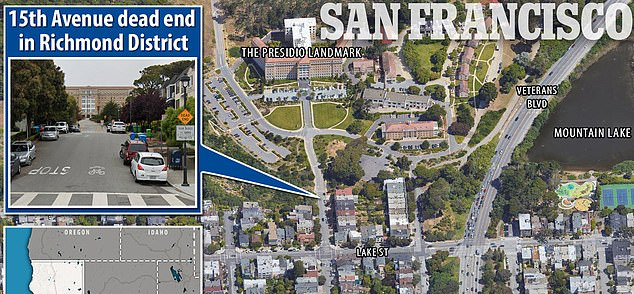
比如说被遮挡住的「STOP」指示牌,对于人类驾驶员来说,基本上可以轻松识别并很快作出行动反应。
但对单车智能来说,在有足够的数据和信息、并且系统足够优化之前,这些符号是难以识别的,毕竟它看到的不是具体的「STOP」,而是一堆无意义的数字代码。

车路协同所具备的信息收集和分析优势使得车路协同在安全性的保证上可以引入「多余度」的概念。
多余度一词源自飞机的设计之中,该技术通过使用多个相同的功能单元和模块来接受相同的信息。当主单元故障时,便会切换至备份单元工作,保障飞机的安全运行。
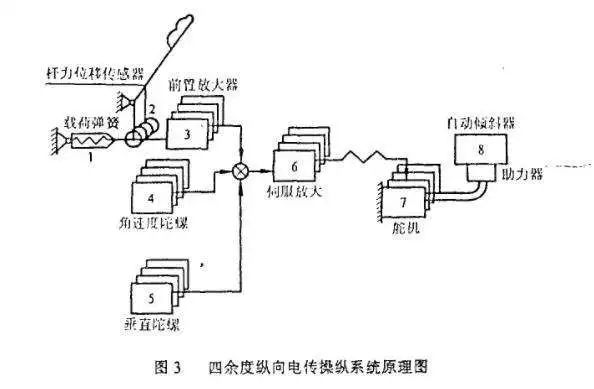

未来,每辆车都将成为信息的接收者、中转者、处理者和发出者,全局调配将在一张城市智慧网上运行,实现对信息的多重采集和判断,从而实现无人驾驶安全性上指数级的提升。
中国无人驾驶特色道路怎么走?

中智行All in车路协同


参考资料:
https://pdf.dfcfw.com/pdf/H3_AP202108131509805924_1.pdf?1628869939000.pdf
https://www.bilibili.com/read/cv8821840
https://www2.deloitte.com/content/dam/Deloitte/cn/Documents/consumer-business/deloitte-cn-cb-autonomous-driving-under-new-infrastructure-zh-210126.pdf
https://www.leiphone.com/category/transportation/cozGOy3epRSg7QK0.html
https://www.rand.org/content/dam/rand/pubs/research_reports/RR1400/RR1478/RAND_RR1478.pdf
https://www.vzkoo.com/read/11c32912f0dfacc9cc4058679905d772.html
