实践教程 | 面向小白的ResNet50复现笔记!

来源 | FightingCV
编辑 | 极市平台
极市导读
本文从 Residual net(残差网络)的结构、ResNet50模型基本构成、总体的网络结构和代码复现四部分展开。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
一、残差结构
Residual net(残差网络)
将靠前若干层的某一层数据输出直接跳过多层引入到后面数据层的输入部分。
意味着后面的特征层的内容会有一部分由其前面的某一层线性贡献。
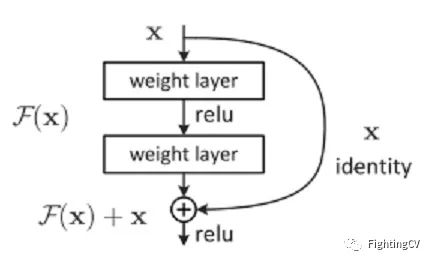
深度残差网络的设计是为了克服由于网络深度加深而产生的学习效率变低与准确率无法有效提升的问题。
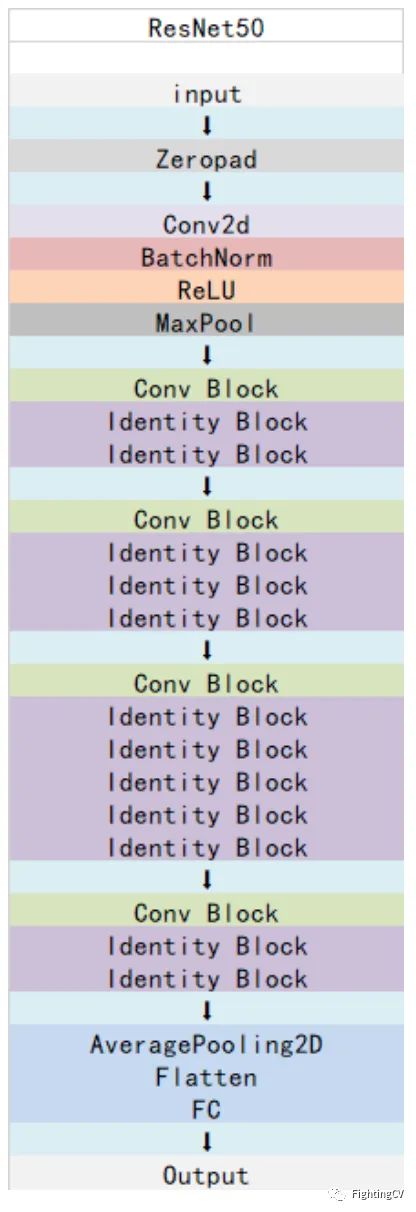
二、ResNet50模型基本构成
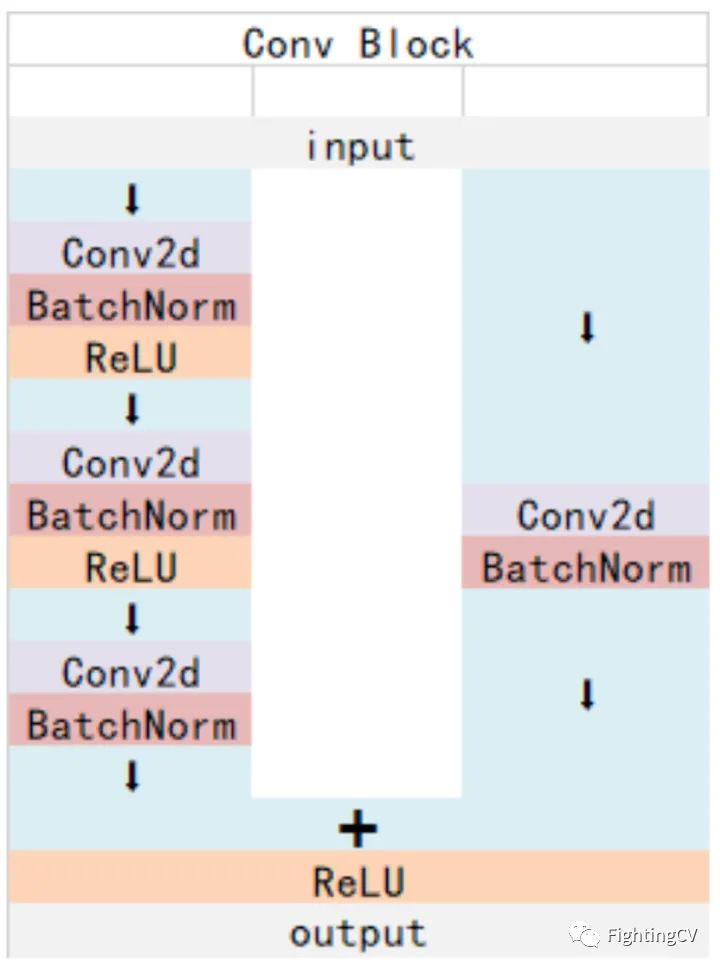
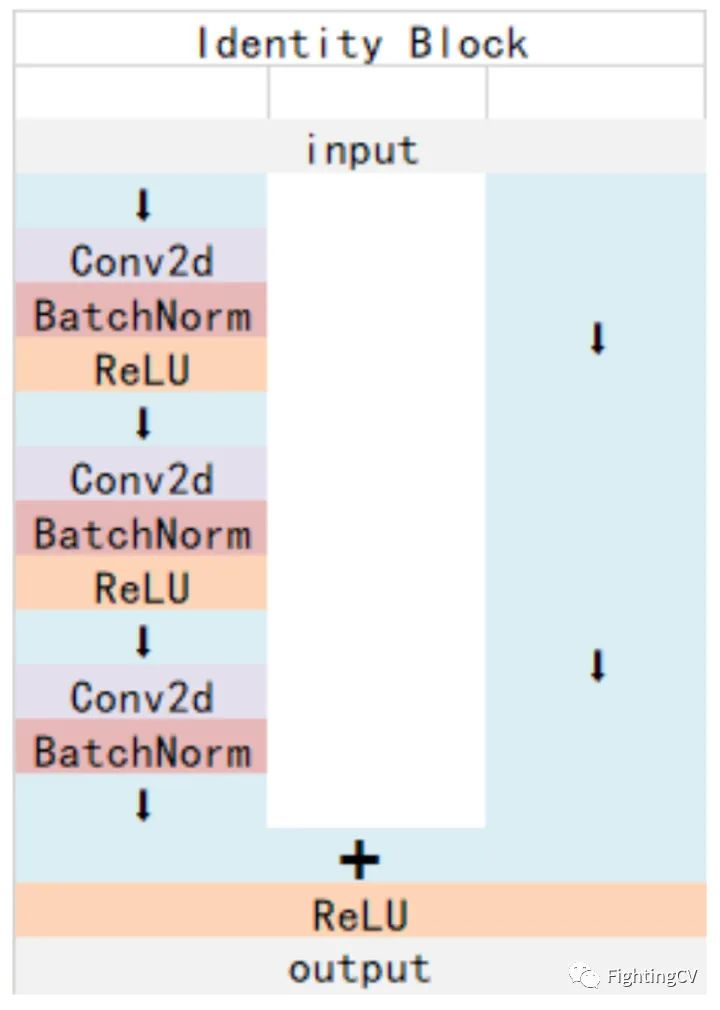
ResNet50有两个基本的块,分别名为Conv Block和Identity Block
Conv Block输入和输出的维度(通道数和size)是不一样的,所以不能连续串联,它的作用是改变网络的维度;
Identity Block输入维度和输出维度(通道数和size)相同,可以串联,用于加深网络的。
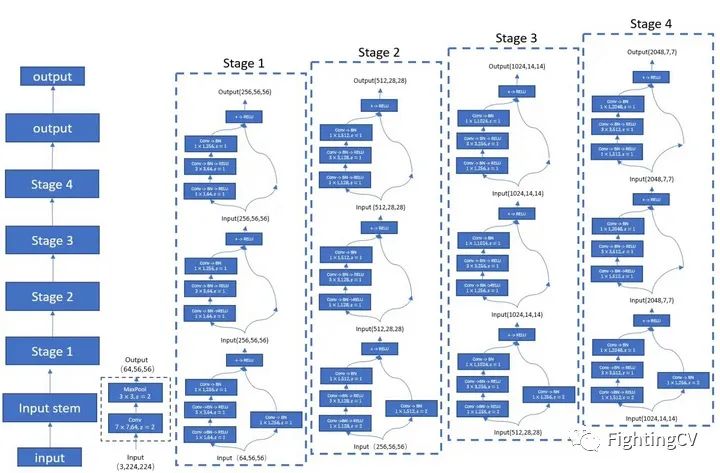
三、总体的网络结构
四、代码复现
1.导库
import torch
from torch import nn
2.写Block类
'''
Block的各个plane值:
inplane:输出block的之前的通道数
midplane:在block中间处理的时候的通道数(这个值是输出维度的1/4)
midplane*self.extention:输出的维度
'''
class Bottleneck(nn.Module):
#每个stage中维度拓展的倍数
extention=4
#定义初始化的网络和参数
def __init__(self,inplane,midplane,stride,downsample=None):
super(Bottleneck,self).__init__()
self.conv1=nn.Conv2d(inplane,midplane,kernel_size=1,stride=stride,bias=False)
self.bn1=nn.BatchNorm2d(midplane)
self.conv2=nn.Conv2d(midplane,midplane,kernel_size=3,stride=1,padding=1,bias=False)
self.bn2=nn.BatchNorm2d(midplane)
self.conv3=nn.Conv2d(midplane,midplane*self.extention,kernel_size=1,stride=1,bias=False)
self.bn3=nn.BatchNorm2d(midplane*self.extention)
self.relu=nn.ReLU(inplace=False)
self.downsample=downsample
self.stride=stride
def forward(self,x):
#参差数据
residual=x
#卷积操作
out=self.relu(self.bn1(self.conv1(x)))
out=self.relu(self.bn2(self.conv2(out)))
out=self.relu(self.bn3(self.conv3(out)))
#是否直连(如果时Identity block就是直连;如果是Conv Block就需要对参差边进行卷积,改变通道数和size)
if(self.downsample!=None):
residual=self.downsample(x)
#将参差部分和卷积部分相加
out+=residual
out=self.relu(out)
return out
3.写Resnet结构
class ResNet(nn.Module):
#初始化网络结构和参数
def __init__(self,block,layers,num_classes=1000):
#self.inplane为当前的fm的通道数
self.inplane=64
super(ResNet,self).__init__()
#参数
self.block=block
self.layers=layers
#stem的网络层
self.conv1=nn.Conv2d(3,self.inplane,kernel_size=7,stride=2,padding=3,bias=False)
self.bn1=nn.BatchNorm2d(self.inplane)
self.relu=nn.ReLU()
self.maxpool=nn.MaxPool2d(kernel_size=3,padding=1,stride=2)
#64,128,256,512是指扩大4倍之前的维度,即Identity Block的中间维度
self.stage1=self.make_layer(self.block,64,self.layers[0],stride=1)
self.stage2=self.make_layer(self.block,128,self.layers[1],stride=2)
self.stage3=self.make_layer(self.block,256,self.layers[2],stride=2)
self.stage4=self.make_layer(self.block,512,self.layers[3],stride=2)
#后续的网络
self.avgpool=nn.AvgPool2d(7)
self.fc = nn.Linear(512 * block.extention, num_classes)
def forward(self,x):
#stem部分:conv+bn+relu+maxpool
out=self.conv1(x)
out=self.bn1(out)
out=self.relu(out)
out=self.maxpool(out)
#block
out=self.stage1(out)
out=self.stage2(out)
out=self.stage3(out)
out=self.stage4(out)
#分类
out=self.avgpool(out)
out = torch.flatten(out, 1)
out=self.fc(out)
return out
def make_layer(self,block,midplane,block_num,stride=1):
'''
block:block模块
midplane:每个模块中间运算的维度,一般等于输出维度/4
block_num:重复次数
stride:Conv Block的步长
'''
block_list=[]
#先计算要不要加downsample模块
downsample=None
if(stride!=1 or self.inplane!=midplane*block.extention):
downsample=nn.Sequential(
nn.Conv2d(self.inplane,midplane*block.extention,stride=stride,kernel_size=1,bias=False),
nn.BatchNorm2d(midplane*block.extention)
)
#Conv Block
conv_block=block(self.inplane,midplane,stride=stride,downsample=downsample)
block_list.append(conv_block)
self.inplane=midplane*block.extention
#Identity Block
for i in range(1,block_num):
block_list.append(block(self.inplane,midplane,stride=1))
return nn.Sequential(*block_list)
4.调用
resnet = ResNet(Bottleneck, [3, 4, 6, 3])
x=torch.randn(1,3,224,224)
x=resnet(x)
print(x.shape)
复现之后resnet的图
链接: https://pan.baidu.com/s/1pazTBDtVMb68tECRR1sM4Q 密码: ps9c
复现之后resnet的代码
链接: https://pan.baidu.com/s/1SKfgCnx_excnc-AzvfK8IQ 密码: fi1w
零、复现参考图:
参考
https://blog.csdn.net/weixin_44791964/article/details/102790260
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“CVPR21检测”获取CVPR2021目标检测论文下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~