
单片机数字滤波算法一些分享(附实践思考)
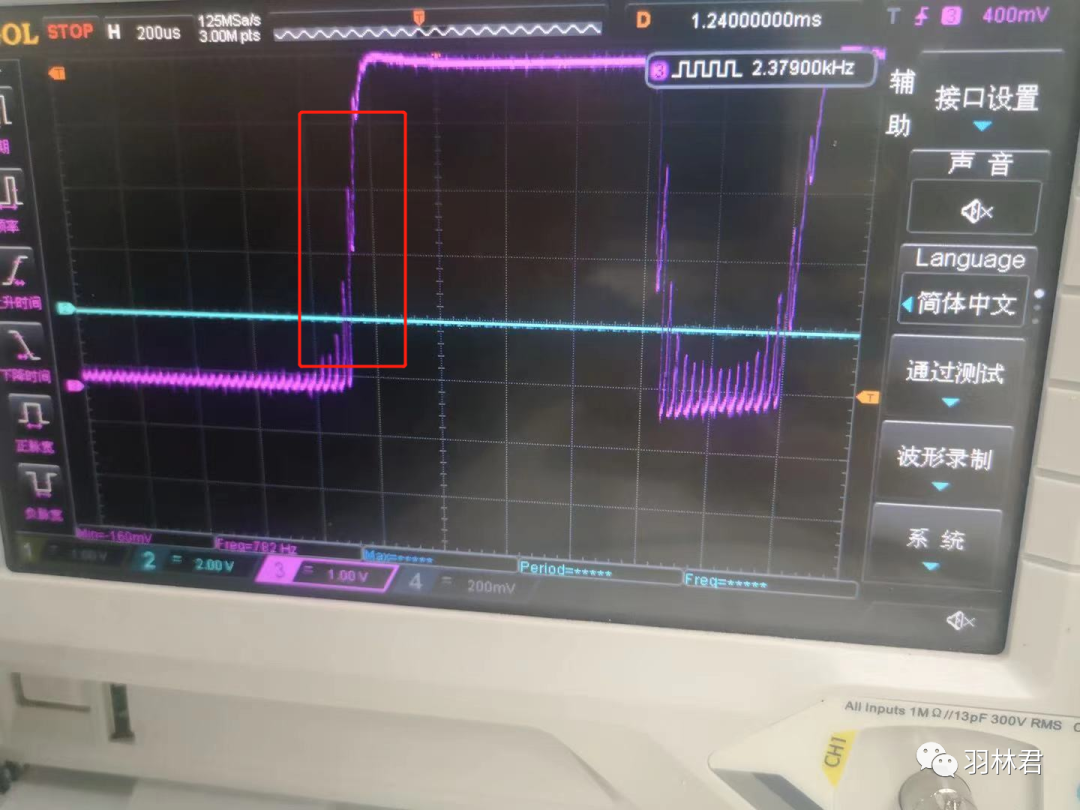
我们大多时候会使用一些别的厂家做的传感器,他们会按照我们要求去做,出现滤波使用的场景很少。但是当你碰到公司自己做的传感器的时候,你会和硬件工程师很多的配合。他会给你优化一些的硬件,但是有些时候不是完整按照你常规使用的传感器那样顺滑。你需要自己去看到硬件示波器的波形,脑海中自己去对应到一个单片机优化后的数据。
ID:技术让梦想更伟大
整理:李肖遥
 采用数字滤波算法克服随机干扰的误差具有以下优点:
采用数字滤波算法克服随机干扰的误差具有以下优点:数字滤波无需其他的硬件成本,只用一个计算过程,可靠性高,不存在阻抗匹配问题。尤其是数字滤波可以对频率很低的信号进行滤波,这是模拟滤波器做不到的。
数字滤波使用软件算法实现,多输入通道可共用一个滤波程序,降低系统开支。
只要适当改变滤波器的滤波程序或运算,就能方便地改变其滤波特性,这对于滤除低频干扰和随机信号会有较大的效果。
在单片机系统中常用的滤波算法有限幅滤波法、中值滤波法、算术平均滤波法、加权平均滤波法、滑动平均滤波等。
 限幅滤波算法
限幅滤波算法
1#define A //允许的最大差值
2
3char data; //上一次的数据
4
5char filter()
6
7{
8
9 char datanew; //新数据变量
10
11 datanew=get_data(); //获得新数据变量
12
13 if((datanew-data)>A||(data-datanew>A))
14
15 return data;
16
17 else
18
19 return datanew;
20
21}
 中值滤波算法
中值滤波算法
1#define N 11 //定义获得的数据个数 2 3char filter()
4
5{
6 7 char value_buff[N]; //定义存储数据的数组 8 9 char count,i,j,temp;
1011 for(count=0;count<N;count++)
1213 {
1415 value_buf[count]=get_data();
1617 delay(); //如果采集数据比较慢,那么就需要延时或中断1819 }
2021 for(j=0;j<N;j++)
2223 {
2425 if(value_buff[i]>value_buff[i+1])
2627 {
2829 temp=value_buff[i];
3031 value_buff[i]=value_buff[i+1];
3233 value_buff[i+1]=temp;
3435 }
3637 }
3839return value_buff[(N-1)/2];
4041}
 算术平均滤波算法
算术平均滤波算法
1char filter()
2
3{
4
5 int sum=0;
6
7 for(count=0;count<N;count++)
8
9 {
10
11 sum+=get_data();
12
13 delay():
14
15 }
16
17 return (char)(sum/N);
18
19}
 加权平均滤波算法
加权平均滤波算法
1char codejq[N]={1,2,3,4,5,6,7,8,9,10,11,12}; //code数组为加权系数表,存在程序存储区
2
3char codesum_jq=1+2+3+4+5+6+7+8+9+10+11+12;
4
5char filter()
6
7{
8
9 char count;
10
11 char value_buff[N];
12
13 int sum=0;
14
15 for(count=0;count<N;count++)
16
17 {
18
19 value_buff[count]=get_data();
20
21 delay();
22
23 }
24
25 for(count=0;count<N;count++)
26
27 sum+=value_buff[count]*jq[count];
28
29 return (char)(sum/sum_jq);
30
31}
 滑动平均滤波算法
滑动平均滤波算法
1char value_buff[N];
2
3char i=0;
4
5char filter()
6
7{
8
9 char count;
10
11 int sum=0;
12
13 value_buff[i++]=get_data();
14
15 if(i==N)
16
17 i=0;
18
19 for(count=0;count<N;count++)
20
21 sum +=value_buff[count];
22
23 return (char)(sum/N);
24
25}
 低通滤波
低通滤波
1Yn=a* Xn+(1-a) *Yn-1
2
3式中 Xn——本次采样值
4
5Yn-1——上次的滤波输出值;
6
7a——滤波系数,其值通常远小于1;
8
9Yn——本次滤波的输出值。
1fL=a/2Pit pi为圆周率3.14…
2
3式中 a——滤波系数;
4
5t——采样间隔时间;
6
7例如:当t=0.5s(即每秒2次),a=1/32时;
8
9fL=(1/32)/(2*3.14*0.5)=0.01Hz
结语
这就是我分享的一个简单的C++解析一些特殊符号的实践,如果大家有更好的想法和需求,也欢迎大家加我好友交流分享哈。
作者:良知犹存,白天努力工作,晚上原创公号号主。公众号内容除了技术还有些人生感悟,一个认真输出内容的职场老司机,也是一个技术之外丰富生活的人,摄影、音乐 and 篮球。关注我,与我一起同行。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
推荐阅读
【3】CPU中的程序是怎么运行起来的 必读
本公众号全部原创干货已整理成一个目录,回复[ 资源 ]即可获得。
评论