
图像采集:机器视觉中图像采集优化方法介绍
重磅干货,第一时间送达

机器视觉在不同的复杂技术领域有着广泛应用。在简单的应用中(例如,利用背光检测不透明物体的轮廓),成像系统可在宽松的系统参数条件下可靠地运行。但在要求较高的应用中(比如检测镜面的表面缺陷),必须将主要参数设置在较小的公差范围内,或使用成本更高的高精度硬件,成像系统才能稳定运行。
成像系统中涉及的主要参数的数量,随着成像应用复杂度的提高而增加。Edmund Optics东京成像实验室对此进行了研究,对于要求较高的成像应用,需要精确调整的参数大约多达20个。
本文主要讨论图像采集优化(以下称为OIA),即:将成像系统中的所有主要参数调整到能够获得最佳图像的过程。完成OIA后,获得的图像具有以下共同特点:
1)在成像系统物理条件限制下,所拍摄的图像获得尽可能多的有用信息;
2)尽可能多地利用相机传感器的有效像素,让待测工件在视野范围内(FOV)最大呈现,仅受工件几何形状和位置变化的限制;
3)在不使用降噪算法的情况下,图像具有最高的信噪比,仅受传感器的参数限制;
4)图像的动态范围接近最大值,没有达到饱和;
5)图像中没有来自其他外部环境产生的不必要影像(例如未使用扩散片的环形光产生的亮斑)。
为达成OIA,需要对所有主要参数进行精确调整。经过OIA调整后的成像系统,为机器视觉系统集成商提供了以下优势:
1)高性价比
成像系统中的关键组件(成像镜头、相机、照明光源和光机结构)充分发挥作用,实现了具有成本效益的解决方案。
2)最少的图像运算处理和分析,最低的软件复杂度
由于OIA可以获得高还原度、高对比度和低噪声的图像,因此对图像处理算法(例如降噪、直方图均衡、膨胀/腐蚀)的需要降至最低,从而显著减少了开发周期、测试时间和硬件成本。
3)显著降低误判率,高质量的图像减少了测试错误
已经调整好的成像系统可以满足以下条件,如图1和图2所示:
1)像平面(传感器面)和物面(检查工件表面)平行;
2)被检查的工件表面位于工作距离(WD)最佳聚焦位置;
3)被检查的工件,接近FOV拍摄矩形成像区域大小,但不超过FOV;
4)工件中心位于镜头的光轴上;
5)被检查工件的浅色(白色、浅灰色等)区域特征,其成像亮度接近像素灰度饱和值(例如8位格式为255,灰度值可以达到220),但未达到饱和。
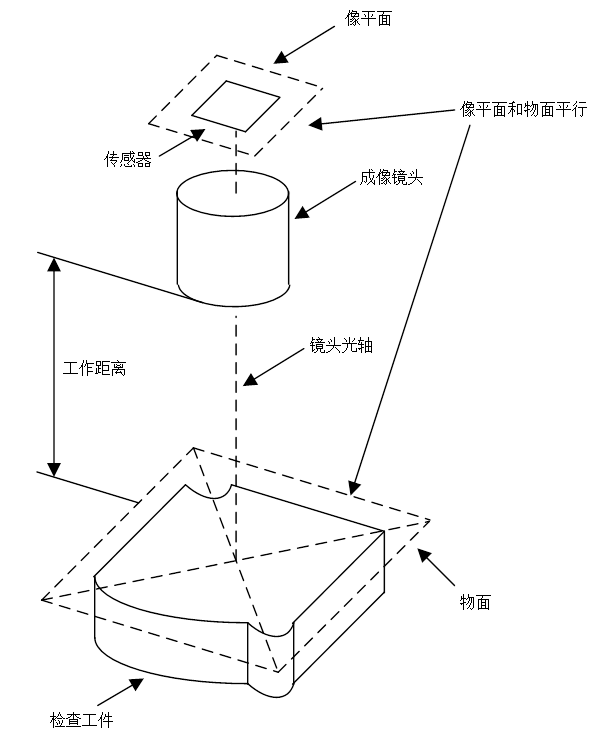
图1:成像系统调整要求,透视图
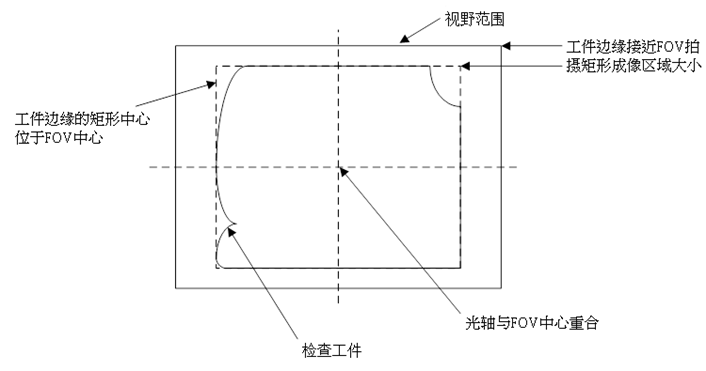
图2:成像系统调整要求,上视图
通常的调整方法是:操作人员通过相机观察图像,以主观判断完成。由Edmund Optics 日本分公司开发的调整应用程序,可对成像系统中的11-17个参数(取决于硬件条件)进行即时测量,从而为操作人员提供实时量化的参数以进行判断。
以下案例中,使用的是西门子星标测试板(产品编号58835)。将星标测试板的标刻面朝向成像系统,并使其与待测物平面重合。
使用EO开发的EORTM(Edmund Optics Real-Time Metrology)软件,实时运算和分析拍摄到的测试板图像。EORTM可以在精确调整至少8组硬件参数(光学机械平台的六个自由度、光源亮度和相机曝光时间)的过程中,给操作人员提供实时闭环反馈。
借助EORTM,在高精度机器视觉应用中调整参数的时间,从大约数小时减少到20分钟甚至更短,但是精度却提高了至少2倍,因为它提供精确可量化指标,而不是依靠主观判断。
一旦所有硬件调整都在软件设定的允许范围内,EORTM将显示如图3所示的全部通过状态,并且判定图像系统已调整完成。
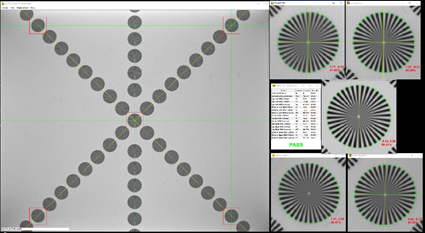
图3:使用EORTM软件和西门子星标测试板进行微调
硬件配置包含一个6维自由度调整平台和相关的光机结构件,以及照明光源和测试板,完全由EO产品目录中的标准产品组成,如图4所示。
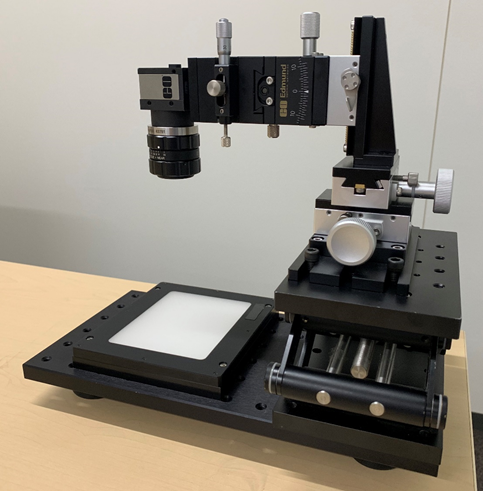
图4:Edmund Optics 6维调整定位平台用于成像系统调整
为了达到OIA,需要精确调整近20种光学、机械、电子和软件参数。表1中列出了这些参数,根据其需要调整的频率归类为:
1)设计阶段(DT):一次,系统规划选型时;
2)设置阶段(ST):一次,相机初始化安装时;
3)实时调整(RT):多次,在OIA调整过程中视需要,可通过可视化或使用软件实时测量获得反馈。
表1:OIA调整过程的主要参数
# | 类别 | 硬件 | 参数 | 调整阶段 |
1 | 电子 | 相机 | 像素数量1 | DT |
2 | 传感器大小 2 | |||
3 | 照明 | 峰值波长 | ||
4 | 光谱分布 | |||
5 | 光学 | 光束发散角 | ||
6 | 镜头 | 视场大小 | ||
7 | MTF | |||
8 | 软件
| 相机 | 图像锐化 | ST |
9 | 噪声处理 | |||
10 | 增益设定 | |||
11 | Gamma曲线校正 | |||
12 | 暗阶设定 | |||
13 | 软件/电子 | 曝光时间 | RT | |
14 | 照明 | 照度 | ||
15 | 光机 | X轴位移 | ||
16 | Y轴位移 | |||
17 | Z轴位移 | |||
18 | X角度倾斜 | |||
19 | Y角度倾斜 | |||
20 | 成像系统 | X轴位移 | ||
21 | Y轴位移 | |||
22 | Z轴位移 | |||
23 | X角度倾斜 | |||
24 | Y角度倾斜 | |||
25 | Z角度倾斜 |
注:1:通常也称为分辨率;2:像素大小代表图像分辨率,这里没有列出,因为它可以根据像素数量和传感器尺寸计算得出。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~