
移动机器人定位导航方式的演进
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自:新机器视觉
在过去二十年时间里,移动机器人逐步进入到工业和商用场景,工业物流搬运、最后一公里配送、安防巡逻、电力巡检等等应用。一方面,是整体产业需求的演进,产业结构的调整,另一方面,与移动机器人定位导航方式的进化息息相关。
移动机器人导航方式从磁条导航、二维码导航、激光导航再到视觉导航,每次导航方式的提升都带来了新的产业机会。本文将从定位导航方式演进的角度,分析其带来的市场应用的变化。
磁条导航是最常见的移动机器人定位与导航方式,在过去二十年时间发挥了巨大的作用。我们看到当年移动机器人领域大的玩家,例如新松、华晓、昆船、机科等,都将磁导航发挥到了极致,特别是在汽车领域。

图1 磁导引AGV

图2 某汽车工厂大件直送方案(注:来自于华晓官网)
在这些领域的推广过程,大多是产线相对比较稳定,物流搬运的路线相对比较统一,将人力不好搬运的组装生产零件变成自动化的解决方案,以提高运行效率。磁导引在这个过程中,也充分发挥了其成本低、易于实施、定制方便以及稳定性高等诸多优点,因此可以在市面上看到很多磁导引移动机器人的应用。
但在过去的十余年间,磁导引的一些问题也逐渐显现,路线固定、现场实施后不易调整、磁条容易受到现场金属等物体的破坏等等,也给用户带来了很多的困扰。新的应用也在催生新的导航方式。
二维码导航的应用,是由Kiva带火的,亚马逊在2012年斥资7.75亿美元收购Kiva systems公司的机器人项目,这家公司专注于如何利用机器人在仓库里完成网上大量的订单派发工作,将二维码导引带进了人们的视野。
我是在14年的时候第一次看到亚马逊仓库里跑满了Kiva机器人的视频,是非常震撼的,集群化的作业调度和整体系统化的改造令人震惊。
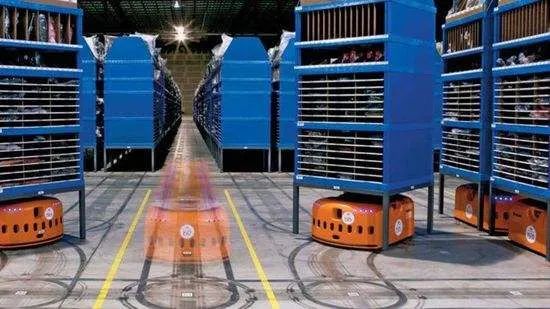 图3 Kiva机器人在仓储环节的应用
图3 Kiva机器人在仓储环节的应用国内涌现了大量围绕在仓储的移动机器人公司,如快仓、Geek+、牧星,当然还有快速入局的海康威视,以及去年被旷视收购的艾瑞斯,先后在阿里巴巴、京东、申通等电商物流场景中投入使用。
虽然电视媒体报导的很多,智慧物流等概念提了一波又一波,但是这一整套的实施成本是非常高的,不仅仅是机器人本身,更多是整个业务系统的调整。
二维码导航的原理,并不复杂,是通过二维码相机扫描地面上的二维码信息,获得其ID,由ID的索引map得到位置信息。市面上,相对稳定且量大的二维码传感器也就是倍加福和海康威视,目前国内大部分二维码导引的机器人公司都是用这两家的传感器。
二维码导引的方式,成本低、部署容易、线路也方便调整,但是最大的问题还在于贴在地上的二维码容易被磨损,需要定期维护,当然对于地面平整度要求也很高。所以二维码导引用在一次没有其他干预的场景是非常合适的,比如电商仓储,或者地面情况好的无人车间。
 图4 Youibot Corgi 兼容二维码和激光导航
图4 Youibot Corgi 兼容二维码和激光导航激光导航这个技术由来很久了,提到激光导航,不得不说起SLAM技术。SLAM(simultaneous localization and mapping), 即时定位与地图构建。机器人进入未知环境遇到的第一个问题,是路径规划及许多其他任务的前提,是实现机器人自主性的关键。我们将其称之为机器人的“内外兼修”。
激光SLAM的理论体系发展,在上世纪基本就相对成熟了,但是其工程化的落地也在最近几年才得以稳定实现并推广。
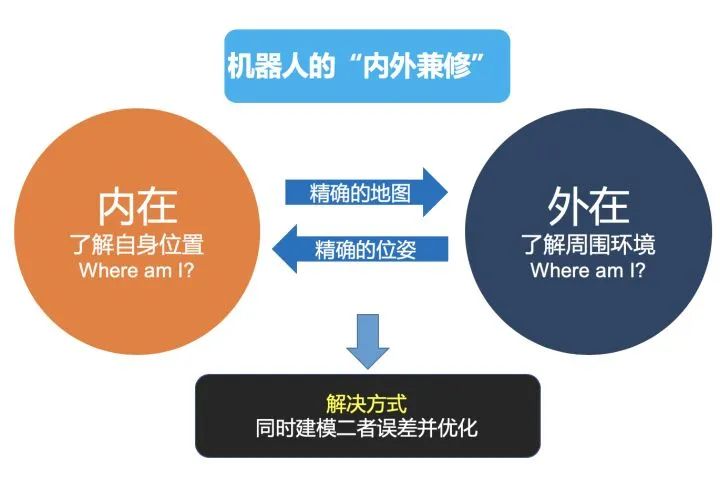
图5 SLAM与机器人
最早国外NDC科尔摩根、ANT等激光导航模块供应商在市场投入使用,给印刷、包装、医疗、机床和机器人等行业的OEM机器制造商提供了解决方案。但市场并没有快速的推广使用,其原因有很多,成本高、实施门槛高等等。
当然这里面的最核心问题还是市场应用没有快速起来,在过去的5~10年时间内,之前工厂使用移动机器人的思考逻辑还是怎么去使用移动机器人去搬运人不好搬的东西,所以我们能看到早期的AGV都是重载类型的;同样的原因,是商用服务以及专业服务的需求还没有大量的产生。
尽管在2015-2017年服务机器人市场非常活跃,但真正需要跑起来的服务机器人少之又少,基本上是一个摆件,那时候说SLAM的服务机器人厂家基本都在瞎扯,其实其本质还在于语音与业务系统的交互。

图6 YouiPilot 激光SLAM后端系统
在这几年的发展,我们关注到制造业特别是离散制造行业,飞机、汽车配件、3C半导体等行业,尝试将工厂的物质流进行联通,所带来的效果是整体效率的提升,保证生产过程的稳定、连续和可控。
激光导引方式,其适应性好、不需要对环境进行额外的改造、部署效率高、任务调整快等优点,使得其在制造和更多场景带来了新的应用可能。移动机器人AMR在这个过程中发挥的作用远远不止代替人类做搬运,而产生了更大的价值。

图7 Trans 200在发动机生产线
激光SLAM的AMR带来了更多任务的可能,基本可以实现【备料仓-生产线-成品仓】整个物流环节的转运。

图8 YouiTMS直接生产材料过程转运
除了直接的生产材料过程转运,在间接生产材料车间的配送,也发挥了巨大的价值。
 图9 YouiTMS间接生产材料车间配送
图9 YouiTMS间接生产材料车间配送不仅仅在制造行业,在专用服务行业,激光导航也发挥了其优点,特别是在电力电厂等巡检场景。一般这种巡检场景是,范围大、精度要求高(不然看不到仪表)、现场不易改造或者改造成本高,这种刚好是激光导引最擅长的。
 图10 激光SLAM在巡检及操作场景的应用
图10 激光SLAM在巡检及操作场景的应用当然,激光导航还有其成本高等缺点,主要也是围绕在激光雷达整体的价格原因,导致其在民用等场景中的使用难度。因此,大家也在积极探索视觉导航等方式。
视觉SLAM是过去几年间,无论学术还是产业都很热门的一个方向,MonoSLAM、Orb-SLAM、LSD-SLAM、KinectFusion等等。我们都深知视觉SLAM的未来应用的潜力,其成本低、环境信息更丰富、不需要对环境进行任何改造,都会使得其应用的范围更广,比如用在更多的服务机器人身上。
但现实非常骨感,目前视觉SLAM不成熟、不稳定、不可靠、对光线等环境因素依赖性大,一般用在扫地机器人,对精度和稳定性没有任何要求的场景。
视觉SLAM用在工业里面的,大多都是视觉路标(在墙上贴二维码)的方式,如果硬说是视觉SLAM,我也知道只能说特别特别牵强了。在这个里面,我们有大量的问题还没有解决,任重而道远。
 图11 形形色色的服务机器人
图11 形形色色的服务机器人导航只是一个工具或者说方法而已,在不同的场景选择最合适的方案服务客户和产生价值才是王道!希望我们每个从事这个行业的科研、产业人士能够回归本质,以价值为纲。
转载于“知乎作者张三疯的《移动机器人定位导航方式的演进与市场应用的变化》一文”。
 End
End
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~