
敏捷如黄蜂!MIT华人助理教授造出「厘米级」类昆虫机器人
新智元报道
新智元报道
来源:MIT News
编辑:LQ
【新智元导读】MIT华人助理教授Kevin Chen成功造出能够飞行的厘米级类昆虫机器人,不仅能飞,还能翻筋斗,实现了仿生昆虫无人机一大飞跃。
在你面前飞来飞去的蚊子,你挥手赶走,它还会回来,一次又一次,让你不胜其烦。
但你是否注意到蚊子在来来回回中表现出的惊人的飞行能力和适应力?
随时出现的一阵「风」就可能把它们吹走,随时可能撞上不明障碍物......
它们的环境充满了不确定性,但正是这样的生存环境让它们变得无比敏捷,具有韧性。
那么无人机能否从中借鉴一二呢?
近日,麻省理工学院的助理教授Kevin Yufeng Chen就设计出了接近昆虫敏捷度的机器人系统。
先来看视频了解一下:
类昆虫无人机
一般情况下,无人机需要在户外、开阔的地方操作,因为它不够敏捷,如果空间小,导航就会非常费力,另外,无人机也非常脆弱,一旦发生碰撞很可能就「坠毁」了。
而且,对于一些复杂、狭窄的环境,很多个头大的无人机也无法施展拳脚。
考虑到目前无人机这些限制,如果能造出类昆虫的无人机——个头小巧又敏捷,撞上障碍物也不影响飞行,那么无人机的应用将大大增加。
个头大的无人机通常由电动机驱动,但是电动机会因为缩小而失去效率。这对小型甚至微型的无人机来说就不可能了,只能找替代品。
目前,最主要的替代方案是采用压电陶瓷材料制成的小型刚性驱动器。虽然压电陶瓷已经在第一代微型无人机上成功应用,但它非常脆弱。
哈佛大学威斯研究所设计的史上最轻飞行机器人机器蜜蜂RoboBees
设计类昆虫机器人,很重要的一个目的就是要让它模仿昆虫的韧性——能承受一定的碰撞,自然界觅食的大黄蜂遭受碰撞的概率大约每秒一次。
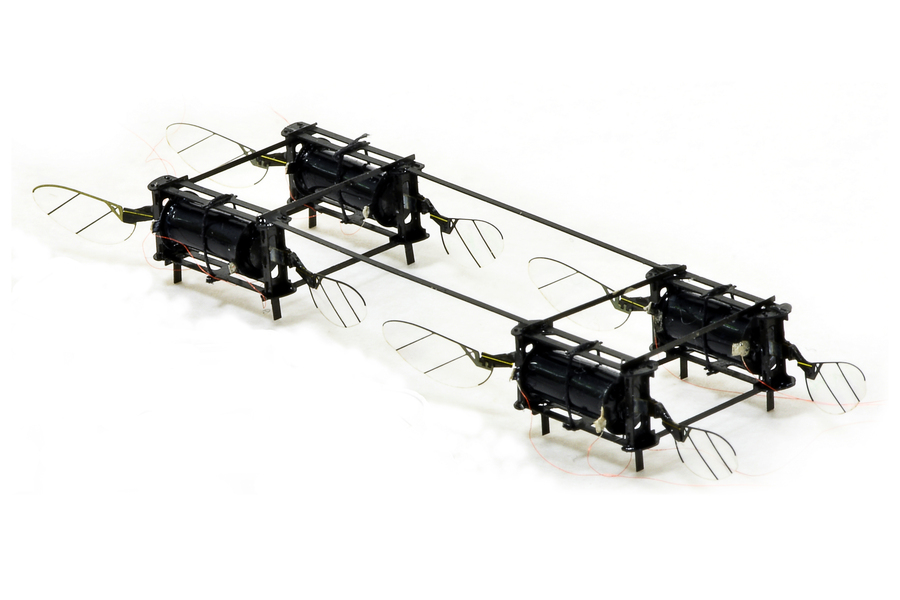
Chen找到了一种替代品——涂有碳纳米管的薄橡胶圆筒制成的软驱动器(如下图所示),当电压施加到碳纳米管上时,它们产生静电力,使橡胶圆筒挤压拉长。
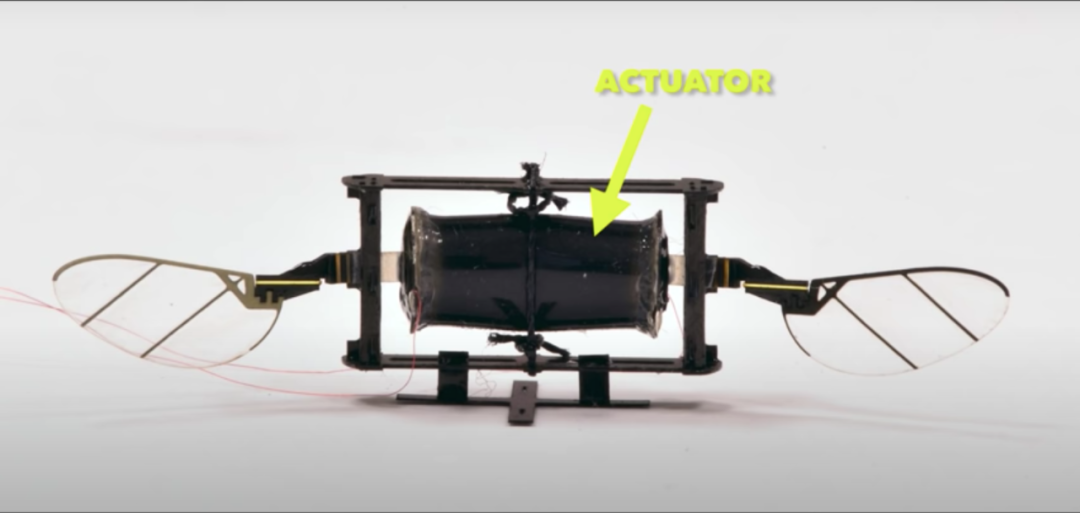
反复的伸长和收缩使机器人的翅膀快速振动。这种软驱动器可以实现每秒500次拍动,这就赋予了机器人昆虫般的弹性。
由于软驱动器固有的柔顺性,无人机就算受到撞击,它也可以迅速反弹,飞行不会受到严重影响。
这一特性非常适合在混乱、动态的环境中飞行。
不仅韧性强,Chen的类昆虫无人机还可以表演翻跟斗,0.16秒内完成翻转动作。
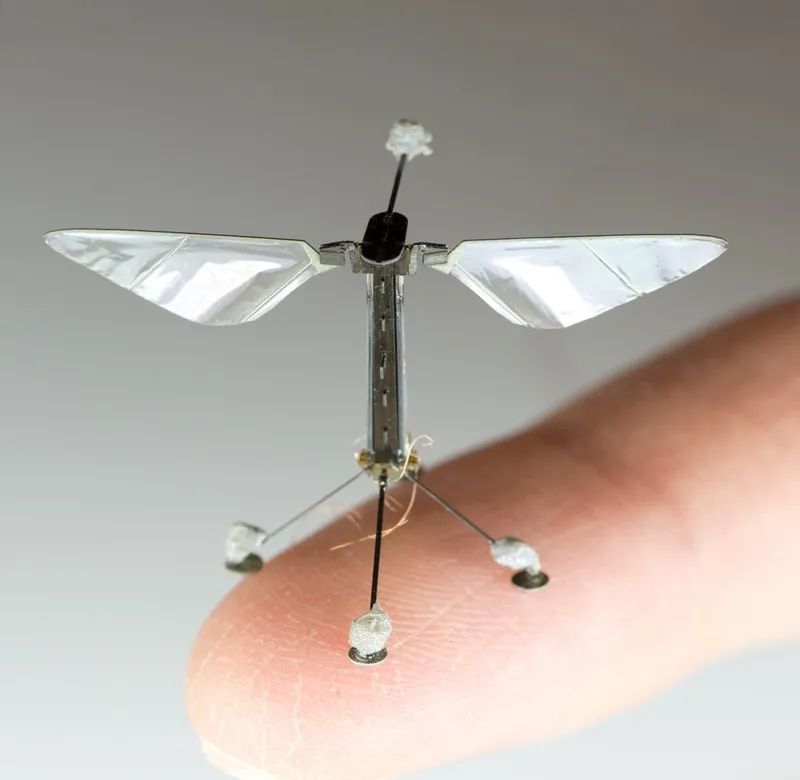
Chen的类昆虫机器人只有0.6克,和一只大黄蜂的重量相当。
外形看起来有点像一个带翅膀的小盒式磁带。
康奈尔大学的电子和计算机工程助理教授Farrell Helbling表示,「厘米级的机器人实现飞行总是一项令人印象深刻的壮举」。
这些应用的一个关键步骤将是从有线电源解除无人机的网络连接,而网络连接是目前所需的驱动器提供高工作电压。
「期待看到作者将如何降低运行电压,在现实环境中实现无线飞行。」
这样个头小巧,行动敏捷,韧性也高的无人机可以应用在复杂机械的检修(检查涡轮机板的裂纹),农作物授粉,或者自然灾害的搜救等环境中。
逆向工程解决生物学问题
逆向工程解决生物学问题
同时,类昆虫无人机可以为研究昆虫飞行的生物学和物理学打开一扇窗户,这也是研究人员长期探索的一个课题。Chen的工作通过一种逆向工程的方式来解决昆虫飞行问题。

「如果你想研究昆虫如何飞行,建立一个机器人模型是非常有指导意义的,你可以扰乱一些东西,看看机器人如何影响运动学或流体力量的变化。这将有助于你理解昆虫是如何飞行的。」
这次研究的相关论文发表在IEEE Xplore,论文作者还包括哈佛大学的博士生Siyi Xu,麻省理工学院的博士生Zhijian Ren,以及香港城市大学的机器人专家Pakpong chirarattanon.

他一直从事昆虫级机器人研究,曾登福布斯30岁以下精英榜
Kevin Yufeng Chen,2020年1月加入MIT电子工程与计算机科学系,任助理教授。
他本科在康奈尔大学获得应用物理学学士学位,在哈佛大学先后获得文理学硕士和工程科学博士学位,博士学习师从机器人专家Robert J. Wood教授,上文中提到的机器蜜蜂RoboBee项目就是Wood教授带领完成。

Robert J. Wood教授
随后Chen在哈佛大学做博士后研究,引领了高度敏捷、多功能和坚固的小型机器人的研发工作。
他的研究成果发表在包括《科学·机器人学》,《自然》和《自然通讯》等顶级期刊上。
他曾是2019年福布斯30位30岁以下精英榜(科学领域)一员,福布斯的介绍重点提及了他的类昆虫机器人研究。

他研究了毫米级的生物力学,提炼其中基本的物理原理,然后将这些发现应用于微型机器人的新功能。
他还对开发新的软驱动器以使微型机器人能够实现敏捷和稳定的运动等研究感兴趣。
另外,论文作者之一哈佛博士生Siyi Xu,目前主要研究软机器人。

另一名作者是MIT博士生Zhijian Ren,据Google Scholar的介绍,Ren目前主要研究软机器人、仿生机器人和控制理论。

还有香港城市大学的机器人专家、副教授Pakpong chirarattanon. 主要研究仿生机器人、微型飞行器、扑翼飞行等。
参考资料:
