
美国喷气推进实验室人工智能技术发展现状与分析

作为国际顶尖的航天强国,美国不仅建立了世界上首个全球卫星导航系统,其所发射的深空探测器足迹也遍及太阳系各大天体。美国后续航天任务具有两大特征:一是其所发射的航天器数目越来越多;二是其所探测的空间越来越远。显然,传统的依赖于航天器进行简单自动控制与地面人工干预、管理的方式难以满足其后续航天任务的要求,严重限制了其近地大规模航天器的运行效率及深空探测器的安全性和可靠性,因而对人工智能技术提出了迫切的需求。人工智能是一个很宽泛的概念,大体来说就是借助计算机和某些感知与执行单元完成某些与人类智能有关的复杂功能的能力。人类具有推理、语言、感知、规划、操控及学习等多种能力,为模拟人类的上述能力,人工智能技术也进一步发展了专家系统、自然语言理解与交流、计算机视觉、机器人学和机器学习等多个分支,如图1所示。

图1 人工智能技术的五大分支
航天任务对人工智能技术的需求主要体现在以下几个方面:
(1)自然灾害的智能监测与预警。对图像数据进行分析是人工智能技术最擅长的应用领域,利用人工智能对卫星所拍摄图像数据信息进行实时分析,对森林山火、火山喷发及洪水等自然灾害进行监测及有效预警具有重要意义。例如,目前全球约有8亿人口生活在距火山100km以内的地区,但其中只有不到10%的火山处于监控当中。借助于卫星对地观测所获取的海量数据,通过人工智能技术对地表温度、火山灰和气体排放等数据进行学习和分析,可以建立火山活动机器学习模型,实现对火山灾害的提前预警,以及在火山爆发时的灾害规划和疏散警告,从而可以显著降低自然灾害所造成的损失和人员伤亡。
(2)航天器与测控设施的智能故障预测与维护。目前近地在轨卫星总数约为7000多颗,而美国就占据了一半,已逾3500多颗。对于那些在轨服务时间长但无法得到及时检测的航天器系统来说,如何有效地运用人工智能技术来进行故障预测分析和预测维护将显得格外重要。此外,NASA在世界各地也建立了大量的地面测控设施,利用人工智能技术对测控设备进行持续的健康监测、潜在故障的提前预测及故障情况下的设备替换调度,对保障其地面测控设施的高效运行维护也具有重要意义。
(3)航天器任务的智能规划与调度。航天器是一个包含时间和资源信息等多种约束的复杂系统,而航天器任务的规划与调度是一项涉及多部门、多周期、多层次的系统工程。传统的航天器任务规划与调度方式需要依赖大量的设计人员和长时间的设计过程,人力和物力耗费极大,且其所设计的任务规划序列和资源的调度分配流程不具有最优性,因此,近年来随着NASA航天器数目的快速增长和航天工程复杂度的不断增加,传统的以设计人员决策为主体的任务规划和调度模式越来越难以适应其航天任务的需求。人工智能与航天器任务规划和调度技术的结合,不仅能够提供新的研究工具和设计手段,同时也能显著提升其设计效率和性能。
(4)航天器探测数据的在轨智能处理。目前大多数航天器尚不具备在轨数据处理能力,因此其只能不加甄别地下传飞行任务中所获取的信息。受航天器对地通信链路带宽的选择及通信时延的影响,这种将所有数据下传并基于地面设备进行分析、处理的方式极大限制了开展空间科学任务的效率。特别是未来的空间任务将对地球环境进行前所未有的监测,将产生更大量的科学数据。因此,迫切需要发展对航天器所获取数据进行在轨预处理或智能筛选、识别的智能技术。
(5)深空探测器智能感知与控制。由于深空复杂环境的准确信息难以通过地面提前观测获取,通常只能在探测器接近目标的过程中测量并将数据传回地面,而地面技术人员根据探测数据开展目标环境特征提取、数学建模及相应的分析和设计,并最终将地面所生成的控制指令通过数据链传回至探测器。由于深空探测器存在较大的测控时延,在对探测过程中的突发事件、稍纵即逝的目标天体和高动态未知环境等时间敏感场景进行探测时,测控时延会对此类探测任务的决策控制造成巨大影响。因此,通过探测器自身敏感器进行智能感知,准确实时把握未知探测环境、探测器状态及突发事件,并根据探测数据在线提取特征,实现相应的自主智能控制,是实现深空自主探测需要解决的首要问题。
(一)自然灾害的智能监测与预警
在自然灾害的智能在轨监测与预警方面,JPL实验室开展了泰国洪水传感网、火山传感网等多项研究。
1.泰国洪水传感网
泰国洪水传感网是JPL实验室与泰国科技部水文和农业信息科学研究所的合作研究项目,主要用于加强对泰国洪水灾害的监测。泰国洪水传感网的主要功能是调度遥感卫星获取特定地区的高分辨率图像,通过对图像的自动分析以检测洪水灾害区域,并提供预警信息。
2.火山传感网
火山传感网是由JPL实验室主导的全球火山活动检测项目,主要通过空间、地面和空中等多传感器组成传感网络,具有模块化、灵活的体系结构,便于传感器扩展、触发场景和进行相应的定制。JPL实验室利用“地球观测”1(EO-1)等卫星所搭载的分辨率成像光谱仪获取火山辐射热数据,可以在火山喷发前几个月甚至前几年进行预测。EO-1卫星是NASA于2000年发射的科学实验卫星,2003年,JPL实验室开始为该卫星配备人工智能软件程序,以开展对地智能观测,如图2所示。从2003年起,该系统已被用于自然灾害的全球监测计划,共发出300万多条指令,进行了6万多次观测,甚至在地面人员意识到灾害发生之前就能够拍摄图像,实现提前预测。由于EO-1卫星上的人工智能程序及火山传感器网络的存在,卫星所监测的数据被迅速下载到地面,并自动检测火山活动的“热点”特征。
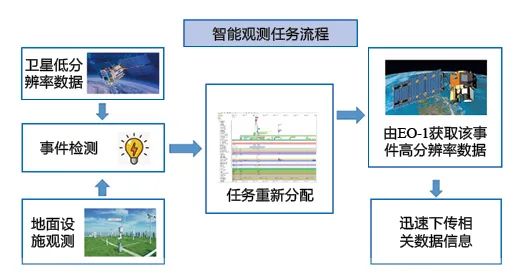
图2 智能对地观测任务流程
(二)航天器与测控设施的智能故障预测与维护
在航天器与测控设施的智能故障预测与维修方面,JPL实验室主要开展了深空网智能故障预测与维护等项目研究。深空网是NASA在美国加州的戈尔德斯通、西班牙的马德里和澳大利亚的堪培拉建立的深空通信综合设施,是目前世界上能力最强、规模最大的深空测控通信系统,其操作控制中心位于JPL实验室。自20世纪60年代至今,深空网一直是NASA深空通信的主要设施,长期支持近40个深空探测器任务。但由于它的多个主要天线建造于20世纪70年代,使用寿命已超40年,所以存在较为严重的设备老化等问题。为避免天线设备故障影响深空通信任务,JPL实验室通过深空网智能故障预测与维护项目,引入人工智能技术来预测天线是否损坏及何时需要维护,以确保可以提前切换天线设施并将其脱机维修,从而保障不会因为设备故障而失去与航天器的通信。
(三)航天器任务的智能规划与调度
早在20世纪末,JPL实验室就已开始研究航天器任务智能规划与调度技术,研发了多个智能任务规划与调度系统,并在多个航天项目中进行了实验验证或应用。
1.ASPEN规划与调度系统
ASPEN(Automated Scheduling and Planning Environment)是JPL实验室开发的一个模块化的、支持多种类型的应用程序,其设计思想是将领域知识的描述与搜索控制知识分离开来,采用的人工智能方法主要包括启发式搜索、迭代修复和时间推理等。ASPEN架构具有通用性,支持不同算法的选择和动态组合。ASPEN是在地面运行的规划和调度系统,主要通过接收航天器所发送的信息,利用系统内部的模型和算法产生航天器的飞行计划及其各子系统的指令序列。ASPEN系统已成功应用在NASA的多个任务中,包括深空网任务规划和调度、EO-1任务规划等。
2.ASPEN-RSSC规划与调度系统
ASPEN-RSSC是JPL实验室为“罗塞塔”彗星探测器科学仪器调度规划所开发的定制软件。“罗塞塔”彗星探测器是欧空局于2004年所发射的深空探测器,其主要科学任务是探测67P/Churyumov-Gerasimenko彗星的成分。“罗塞塔”探测器携带二次离子质谱仪等11种科学仪器,其科学仪器调度规划过程极为复杂,一方面每个仪器都需进行多种探测活动,另一方面也要求探测器本身满足几何、光照、位置、航天器指向等多种严苛的约束要求。ASPEN-RSSC系统基于ASPEN系统的二次定制开发而成,通过优先级调度等算法成功完成“罗塞塔”探测器长期、中期及短期探测计划的多次任务规划和调度。
3.CLASP规划与调度系统
CLASP(Compressed Large-scale Activity Scheduling and Planning)系统是JPL实验室所开发的航天器任务重规划和执行软件,它主要基于迭代修复等智能方法实现。该程序包括现有目标设置、状态和预期结果模型等,其中实时状态允许随时更新。该更新可以是任何事,从简单的时间处理调整到未预期的事件。基于CLASP系统,航天器可以对环境中的意外变化做出更灵敏的响应,并显著减少对预测模型的依赖。
4.MEXEC规划与调度系统
MEXEC是JPL实验室所开发的一款轻量级、多任务规划和调度软件,旨在提高航天器的自主性和效率,如图3所示。MEXEC最初是为“木卫二快帆”(Europa Clipper)探测器原型样机验证而创建的,作为故障操作需求的潜在解决方案。Europa Clipper探测器是美国NASA正在开发的一个行星际探测器,计划于2024年发射,其主要任务是对木卫二进行多次近距离飞越,以收集有关该卫星大气层、表面和内部的数据。MEXEC规划与调度系统的主要功能是在探测器出现计算机重置等情况下,保证飞行软件能够将航天器带回安全状态,并尽快恢复科学操作,以减少科学损失。MEXEC系统能够有效应对意外变化,并允许探测器在解决问题的同时能够继续执行安全任务,是Europa Clipper探测器的重要组成部分。
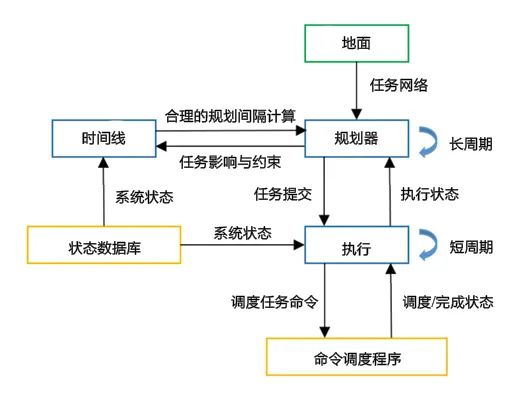
图3 MEXEC原型飞行软件
(四)航天器探测数据的在轨智能处理
在航天器探测数据的在轨智能处理方面,JPL实验室开展了星载科学算法和HyspIRI智能载荷模块等研究。
1.星载科学算法
星载科学算法的主要功能是对数据图像进行智能分析,主要采用机器学习和模式识别等智能方法。基于星载科学算法,可以识别出最有价值的科学数据并将之下传到地面,从而能够从根本上解决下传数据链路资源不足的问题。
2.HyspIRI智能载荷模块
高光谱红外成像(HyspIRI)任务是NASA于2007年启动的实地研究项目,主要包括一个可见光至短波红外VSWIR成像光谱仪和一个热红外TIR多光谱成像仪,以及对数据进行快速下行和在轨处理的智能有效载荷模块。其中,智能载荷模块的主要功能是按照HyspIRI任务制定过程的要求,执行星载数据处理,并在时间敏感节点为用户提供灾难响应、干旱监测,以及地面现场实验和校正/验证活动等服务。
在HyspIRI智能载荷模块中进行星载数据处理面临以下几个难点问题:首先,航天器上所获取的数据存在一定失真,需要进行在轨校准或校正;其次,星载计算资源与地面中心相比通常有限,如2020年所发射的美国“毅力”火星探测器,其所载计算机的主频和内存分别约为200MHz及256M,与地面高性能计算机相比差距极大;此外,航天器执行任务过程中会产生大量的数据,这些数据的速率需要匹配高效的算法、简化的数据流和优化的系统工程。HyspIRI智能载荷模块的解决方案是采用两个处理器,一个用于命令和数据处理,另一个用于科学数据处理;此外,其所采用的智能方法一般为轻量型算法,如决策树分类器、SVM分类器和回归、分类和回归树(CART)、贝叶斯最大似然分类器等。
(五)深空探测器智能感知与控制
在深空探测器智能感知与控制方面,JPL实验室开展了“火星2020”探测任务智能感知与控制系统研究。
1.“火星2020”探测任务智能感知与控制系统
“火星2020”是美国火星探测计划的火星探测器任务,其中包括“毅力”火星车和“机智”无人直升机。其火星探测器于2020年7月发射,并于2021年2月抵达火星。JPL实验室为“毅力”火星车开发了人工智能套件,以应对火星车与地面通信机会有限及其部分性能难以预测等所带来的难题。智能感知与控制系统主要包括以下3个方面:
(1)火星车的智能自动行驶。人工智能技术使得“毅力”火星车在陌生的星球环境中具备环境智能识别、目标智能分析及路径智能规划等能力,在保证其安全性能的基础上能够有效提升其行驶速度。
(2)火星岩石成分的智能收集分析。JPL实验室开发的自主探索收集增强型科学系统(AEGIS)允许任务工程师远程瞄准和控制其SuperCam摄像头。该摄像头也是一种激光光谱仪,通过发射激光照射在岩石上以蒸发其表面成分,并同时对生成的岩石等离子体进行智能分析,以确定岩石的元素。
(3)科学仪器的智能调度规划。“毅力”火星车携带7种科学仪器、3个摄像头、2个麦克风,任务计划探测耶泽罗撞击坑附近的火星表面。科学仪器的智能调度规划系统是火星车进行长时间、无人自主科学探测的重要支撑。
2.行星洞穴探测机器人
JPL实验室是NASA机器人研发的主要研究机构,在过去数十年间,其研制了“好奇”火星车、“毅力”火星车、“机智”无人直升机等多种机器人,并长期致力于将更先进的机器人派往太阳系的其他天体,代替人类完成深空极端环境下的探测任务。由于行星洞穴能够保护生命免受宇宙辐射或太阳系周围极端温度波动的影响,因此是寻找行星生命迹象的重要突破口,同时对认识行星的演化过程具有重要意义;此外,行星洞穴也能为未来星际移民提供天然的庇护所。行星洞穴环境复杂多变,例如,火星上的洞穴可能长达数百米,因而导致在洞穴内与地球之间的通信交流受到限制,此时只能依赖于具有自主行动能力和智能决策能力的机器人进行深入探测。因此,JPL实验室提出了两种多机器人协同探测的方案,其目的是使机器人尽可能深入洞穴,同时将尽可能多的数据发送回行星表面基站。
第一种方案采用多机器人协同接力探测的策略,这种方案分为两个阶段:第一阶段先指定分派洞穴探测机器人,保证其相互之间的通信距离,然后单向传输数据直至探测机器人失联;第二阶段是通过放宽通信距离的限制,让机器人在洞穴中进一步获取科学数据并传出洞穴。第二种方案采用侦察兵策略,在该方案中,一组仅携带少数科学探测仪器的漫游机器人采用巡游的方式探测尽可能大的洞穴区域,在找到潜在科学目标后,由功能更强大的科学探测机器人进行更进一步探测。
在美国政府向国会提交的2023财年预算报告中,NASA获得了有史以来最高的财年预算(约260亿美元),比2022年的拨款高出约8%。2022财年NASA关于行星科学的预算额度高达32亿美元,其中包括“毅力”火星车后续任务——火星样品返回任务、NASA商业月球载荷服务项目系列任务,以及对近地潜在危险小行星探测任务。2023财年NASA的大部分预算都划拨给“阿尔忒弥斯”(Artemis)登月计划。这些后续深空探测任务对人工智能技术提出更高的需求。
通过对JPL实验室在研人工智能项目进行研究分析可以发现,其未来人工智能技术发展主要有以下几个特征:
(1)JPL实验室正在将人工智能的7种模式更广泛地应用于近地轨道卫星和深空探测器的多个分系统。人工智能的7种模式包括超个性化、识别、模式与异常、交流与人机互动、自主系统、预测分析与决策支持、目标驱动系统(见图4),其中超个性化是将每一个航天器都作为独立的个体,发展定制化的智能方法;识别、模式与异常能够利用航天器所携带的各种传感器对飞行环境、探测对象和航天器自身状态进行智能感知和识别;交流与人机互动使得航天器能够像人类一样与航天员或地面技术人员进行通信和人机交互;自主系统使得航天器在不依赖或无法依赖地面技术人员的情况下实现自主的规划、决策和操控;预测、分析与决策支持使得航天器在对过去数据和行为进行学习的基础上能够实现对未来的预测,包括故障预测、飞行轨迹预测等;目标驱动系统借助强化学习等机器学习,通过航天器与环境的交互、试错过程进行学习。上述人工智能7种模式的广泛应用将大幅提升航天器的自主能力和智能化水平。

图4 人工智能的7种模式
(2)功能各异的智能机器人是JPL实验室近期发展的重点。未来的航天任务不仅需要在行星表面进行巡游探测、资源勘查、矿产开采、原料运输和设施建造的机器人,也需要在行星洞穴、行星海洋中进行深入探测的机器人。不同功能、不同构型的机器人不仅分工明确,而且具有协同合作的能力。智能机器人技术作为JPL实验室的战略性关键技术,对未来月球、行星的资源开发和星际移民具有非常重要的意义。
(3)JPL实验室的航天器智能技术正在从单一智能向集群智能发展。目前JPL实验室所研究的智能规划与调度、智能感知与控制、智能预测与维护等技术基本都是针对单一航天器所发展的,具有功能单一、智能化程度较低等缺陷。随着航天器技术的快速发展,航天器也逐渐向小型化、低成本的方向发展,多个航天器协同工作完成复杂太空探索任务的航天器集群探测模式必然会成为深空探索和空间应用领域的主流方式。特别是在行星洞穴探测和大型行星设施建造任务中,唯有机器人集群协同工作才能完成预定任务,因此JPL实验室在发展单一航天器人工智能技术的基础上,正在全力拓展航天器集群智能技术的研究和应用。
(4)JPL实验室的航天器智能技术呈现出从应用探索向基础理论迈进的趋势。航天器智能技术是人工智能应用在航天工程这一特殊领域及学科交叉融合过程中所涌现的新问题和关键难题,其基础理论研究尚薄弱,有待于进一步加强和深入发展;其现有研究方法先天不足,亟需新的研究思路和研究手段,以实现其技术瓶颈的突破。JPL实验室现阶段的智能技术研究主要集中在人工智能在航天器对象中的可应用性问题方面,仍处于从无到有的探索阶段。随着人工智能技术在多个航天任务中的成功应用,从有到优逐渐成为其下一阶段的重心。
在过去的20年间,美国JPL实验室的人工智能技术快速发展,并在“罗塞塔”彗星探测、“火星2020”等多个航天任务中得以成功应用。目前,我国航天领域的人工智能技术尚处于起步阶段,研究、分析国际顶尖实验室人工智能技术的发展现状和发展趋势,对加快我国航天系统人工智能技术的发展、推进空间探测模式的转变和提升地外深空天体资源开发利用能力具有参考意义。
>>>
充满激情的新时代,
充满挑战的新疆域,
与踔厉奋发的引领者,
卓尔不群的企业家,
一起开拓,
一起体验,
一起感悟,
共同打造更真品质,
共同实现更高价值,
共同见证商业航天更大的跨越!
——《卫星与网络》,观察,记录,传播,引领。
>>>
· 《卫星与网络》特别顾问:王兆耀
· 《卫星与网络》编辑委员会
高级顾问:王国玉、吴炜琦、刘程、童旭东、相振华、王志义、杨烈
编辑委员:曹志刚、陈嵩辉、邓中亮、荆继武、景贵飞、郎燕、刘进军、刘天雄、宁振波、秦智、汪春霆、吴季、徐小舒、阎丽娟、赵敏、肇启明、周建华、朱铎先
· 《卫星与网络》创始人:刘雨菲
· 《卫星与网络》副社长:袁鸿翼
· 《卫星与网络》常务副社长:冉承新