
(附论文&代码)LaneATT:最快250fps的高性能车道线检测算法
点击左上方蓝字关注我们

CVPR 2021 车道线检测方向论文:Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection 。
论文:
https://arxiv.org/pdf/2010.12035.pdf
代码:
https://github.com/lucastabelini/LaneATT
动机
车道线检测是自动驾驶领域非常重要的子任务之一。作者提出了一个实时、高性能的车道线检测算法,将其命名为LaneATT。
该方法基于anchor实现,且应用了注意力机制,轻量级版本的推理速度达到250FPS。
网络结构
1.1 总体流程
算法总体流程如下图所示:
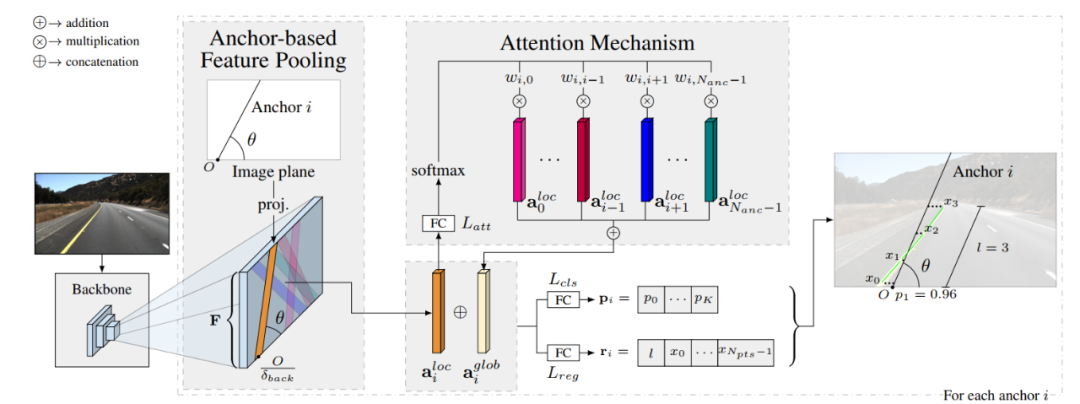
1.2 车道线和anchor的表示方法
车道线的表示
1.3 Backbone
使用诸如ResNet的通用网络作为LaneATT的backbone;将backbone的输出特征记作。
1.4 feature pooling
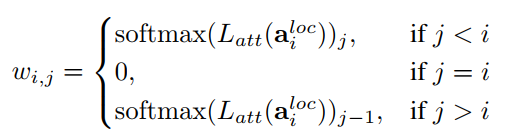
1.5 注意力机制
1.6 prediction head
1.7 NMS
模型训练
2.1 训练
2.2 模型加速
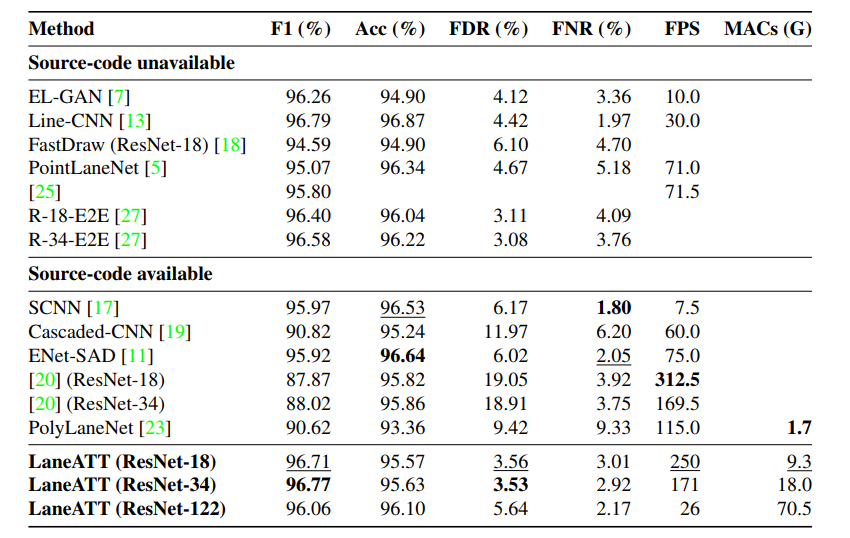
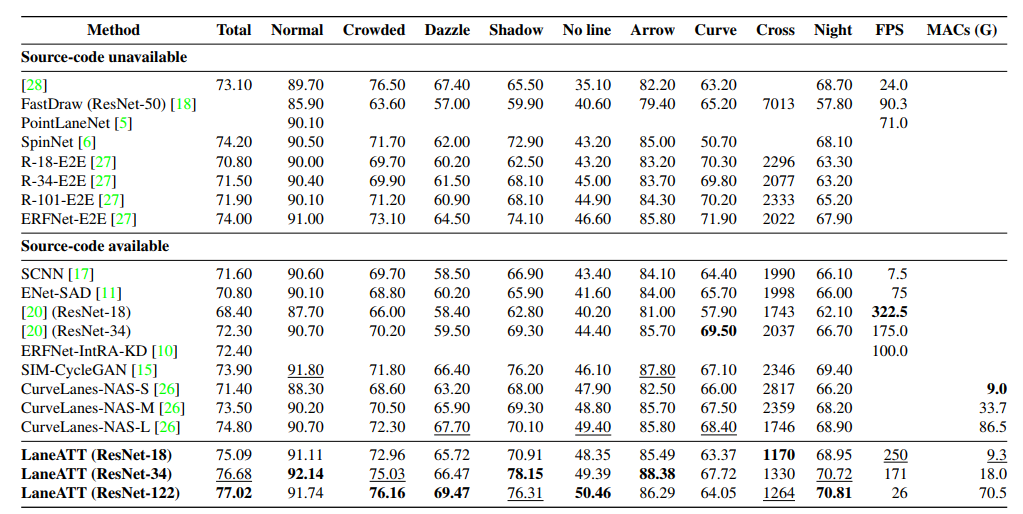
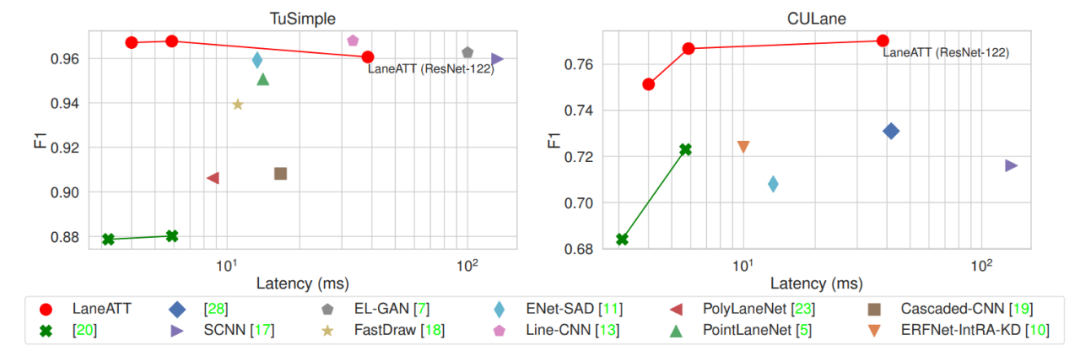
实验结果
在训练时,网络输入图片分辨率为,使用translation、rotation、scaling和horizontal flip用于数据增强。设置,,,。

总结
提出了实时、单阶段、基于anchor的高性能车道线检测算法LaneATT;
在LaneATT中应用注意力机制,提高算法性能;
LaneATT能够很好地平衡精度和推理速度。
END
整理不易,点赞三连↓
评论