
实战:车牌识别之车牌定位
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自|3D视觉工坊
从本节起,我们开始尝试做一下车牌识别中的算法部分。从上一节的基本框架图中,可以看到,要想做车牌识别,第一步还是要知道车牌在图片中的位置!
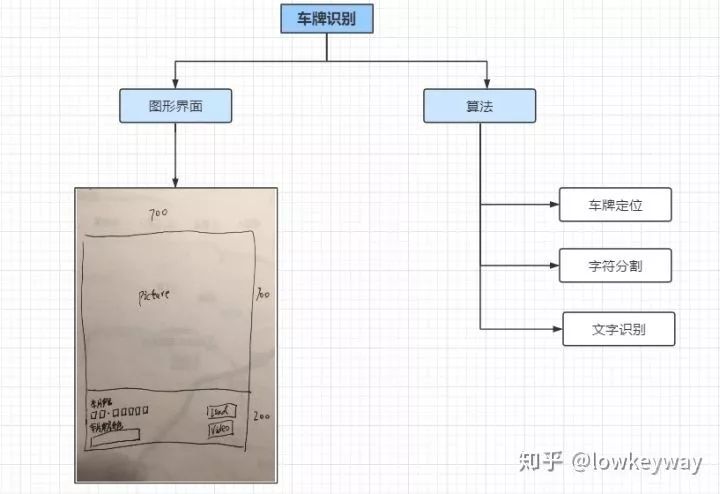
所以,万里长征第一步,我们先从车牌定位开始吧。
车牌定位
寻找车牌对于人脑来说真是小事一桩,这也是经过千锤百炼的结果。但是对于计算机来说可能就没有这么简单了。我们先来看看在物理世界什么是车牌,以及他们有什么特征。
我们以中国车牌为例,车牌的种类也是繁杂得很。从汽车类型上分有:
小型车号牌
大型车号牌
挂车号牌
使、领馆汽车号牌
港澳出境车号牌
教练号牌
警车号牌
消防号牌
等等。。。
从车牌底色上看有:
蓝色
黄色
绿色
白色
黑色
黄色+绿色
面对如此众多的分类,最怕的就是一开始就想做一个大而全的系统。敏捷开发才是王道,我们以其中一个最普通的小型车号牌+蓝色为例,找一找它的特征点:

1. 尺寸
宽440mm×高140mm的矩形
2. 颜色
背景为蓝色,显示内容为白色
3. 内容
以“沪A-88888”为例,格式为“汉字(省/直辖市缩写)”+“大写字母(市/区缩写)”+“点(-)”+“5位大写字母和数字的组合(随机车牌号)”
好了,了解过了车牌的基本内容,我们就要开始思考如何在一张数字图像上找到车牌。这里我们只利用两个有用信息尺寸和颜色(内容部分比较难,放在后面)。
尺寸因为图片大小和车牌远近的问题,只能用到它的比例和矩形特征。我们可以尝试找到符合宽高比在(2, 4)之间的矩形。那么车牌就在这些矩形里了。
颜色部分可以用来做精调,可以在上面的矩形里找到符合蓝色覆盖比例的部分。这样一可以剔除那些非蓝色的矩形,而来可以缩小矩形范围提炼精确的车牌内容。
为了实现上面两个大思路,再具体一些可以分成如下七步:
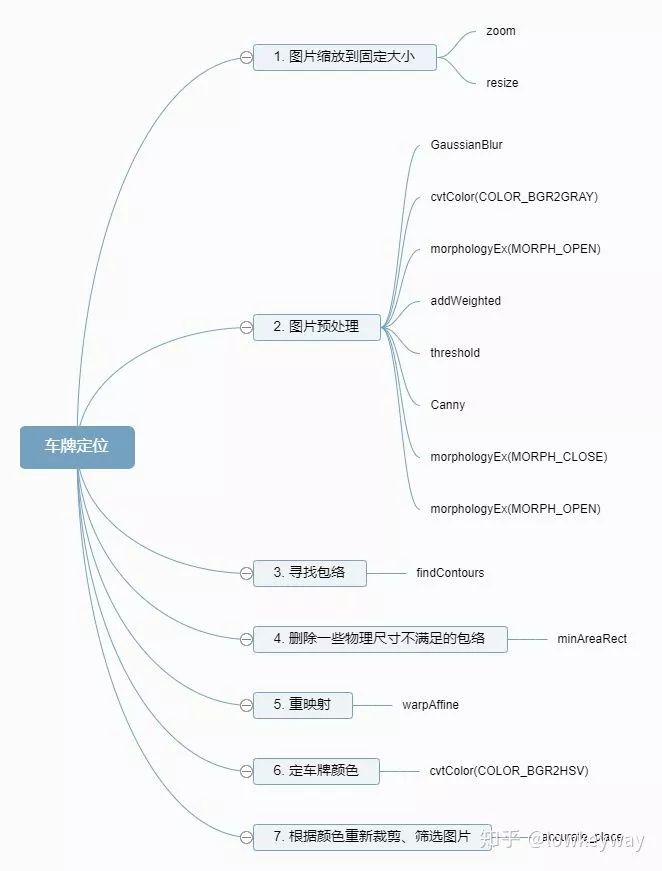
1. 图片缩放到固定的大小
由于加载图片大小的差异,缩放到固定大小的最重要的原因是方便后面的模糊、开、闭操作,可以用一个统一的内核大小处理不同的图片了。
def zoom(w, h, wMax, hMax):
# if w <= wMax and h <= hMax:
# return w, h
widthScale = 1.0 * wMax / w
heightScale = 1.0 * hMax / h
scale = min(widthScale, heightScale)
resizeWidth = int(w * scale)
resizeHeight = int(h * scale)
return resizeWidth, resizeHeight
# Step1: Resize
img = np.copy(self.imgOri)
h, w = img.shape[:2]
imgWidth, imgHeight = zoom(w, h, self.maxLength, self.maxLength)
print(w, h, imgWidth, imgHeight)
img =cv.resize(img, (imgWidth, imgHeight), interpolation=cv.INTER_AREA)
cv.imshow("imgResize", img) 
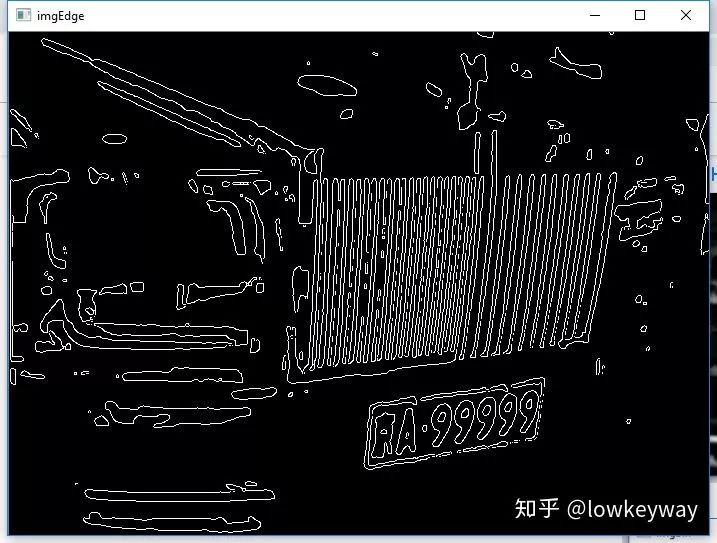
2. 图片预处理
图片预处理部分是最重要的,这里面所有做的操作都是给有效地寻找包络服务的,其中用到了高斯模糊来降低噪声,开操作和加权来强化对比度,二值化和Canny边缘检测来找到物体轮廓,用先闭后开操作找到整块整块的矩形。
# Step2: Prepare to find contours
img = cv.GaussianBlur(img, (3, 3), 0)
imgGary = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow("imgGary", imgGary)
kernel = np.ones((20, 20), np.uint8)
imgOpen = cv.morphologyEx(imgGary, cv.MORPH_OPEN, kernel)
cv.imshow("imgOpen", imgOpen)
imgOpenWeight = cv.addWeighted(imgGary, 1, imgOpen, -1, 0)
cv.imshow("imgOpenWeight", imgOpenWeight)
ret, imgBin = cv.threshold(imgOpenWeight, 0, 255, cv.THRESH_OTSU + cv.THRESH_BINARY)
cv.imshow("imgBin", imgBin)
imgEdge = cv.Canny(imgBin, 100, 200)
cv.imshow("imgEdge", imgEdge)
kernel = np.ones((10, 19), np.uint8)
imgEdge = cv.morphologyEx(imgEdge, cv.MORPH_CLOSE, kernel)
imgEdge = cv.morphologyEx(imgEdge, cv.MORPH_OPEN, kernel)
cv.imshow("imgEdgeProcessed", imgEdge) 




3. 寻找包络
有了上面的处理,寻找包络就简单多了。OpenCV的一个接口findContours就搞定!
# Step3: Find Contours
image, contours, hierarchy = cv.findContours(imgEdge, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
contours = [cnt for cnt in contours if cv.contourArea(cnt) > self.minArea] 4. 删除一些物理尺寸不满足的包络
轮询所有包络,通过minAreaRect找到他们对应的最小矩形。先通过宽、高比来删除一些不符合条件的。
# Step4: Delete some rects
carPlateList = []
imgDark = np.zeros(img.shape, dtype = img.dtype)
for index, contour in enumerate(contours):
rect = cv.minAreaRect(contour) # [中心(x,y), (宽,高), 旋转角度]
w, h = rect[1]
if w < h:
w, h = h, w
scale = w/h
if scale > 2 and scale < 4:
# color = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255))
color = (255, 255, 255)
carPlateList.append(rect)
cv.drawContours(imgDark, contours, index, color, 1, 8)
box = cv.boxPoints(rect) # Peak Coordinate
box = np.int0(box)
# Draw them out
cv.drawContours(imgDark, [box], 0, (0, 0, 255), 1)
cv.imshow("imgGaryContour", imgDark)
print("Vehicle number: ", len(carPlateList)) 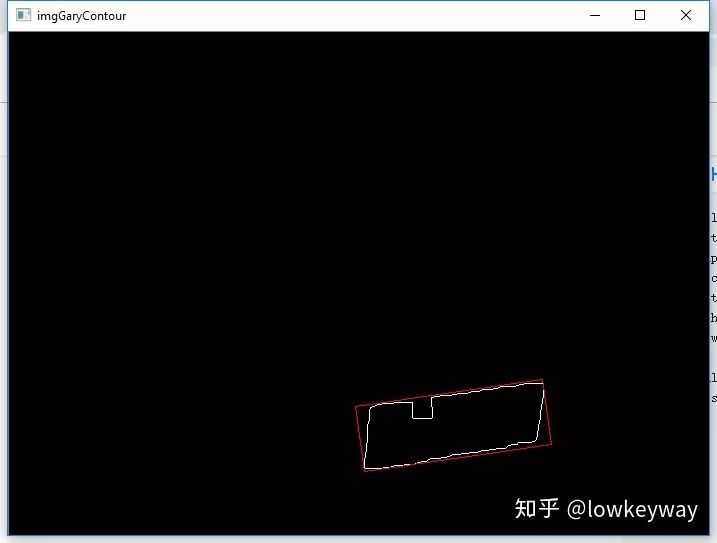
5. 重映射
这里做的是仿射变换,为什么要做这个呢?原因是因为拍摄角度的原因,我们得到的矩形通常是由写偏角的,这里希望把它们摆正。
# Step5: Rect rectify
imgPlatList = []
for index, carPlat in enumerate(carPlateList):
if carPlat[2] > -1 and carPlat[2] < 1:
angle = 1
else:
angle = carPlat[2]
carPlat = (carPlat[0], (carPlat[1][0] + 5, carPlat[1][1] + 5), angle)
box = cv.boxPoints(carPlat)
# Which point is Left/Right/Top/Bottom
w, h = carPlat[1][0], carPlat[1][1]
if w > h:
LT = box[1]
LB = box[0]
RT = box[2]
RB = box[3]
else:
LT = box[2]
LB = box[1]
RT = box[3]
RB = box[0]
for point in [LT, LB, RT, RB]:
pointLimit(point, imgWidth, imgHeight)
# Do warpAffine
newLB = [LT[0], LB[1]]
newRB = [RB[0], LB[1]]
oldTriangle = np.float32([LT, LB, RB])
newTriangle = np.float32([LT, newLB, newRB])
warpMat = cv.getAffineTransform(oldTriangle, newTriangle)
imgAffine = cv.warpAffine(img, warpMat, (imgWidth, imgHeight))
cv.imshow("imgAffine" + str(index), imgAffine)
print("Index: ", index)
imgPlat = imgAffine[int(LT[1]):int(newLB[1]), int(newLB[0]):int(newRB[0])]
imgPlatList.append(imgPlat)
cv.imshow("imgPlat" + str(index), imgPlat) 
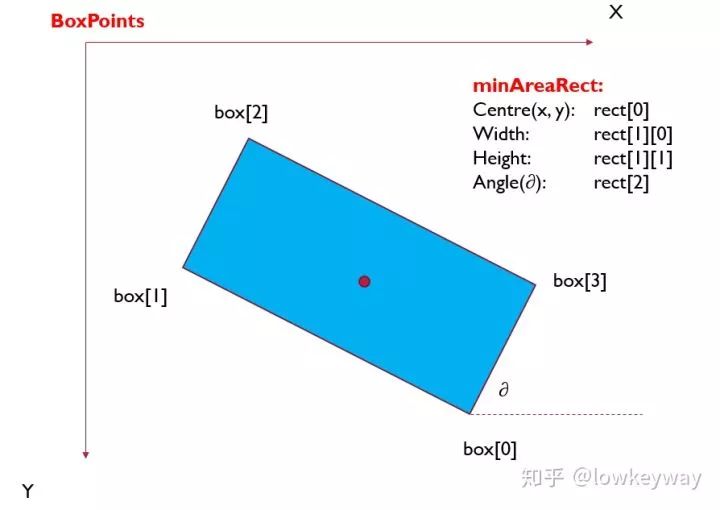
需要注意的是这里用了boxPoints接口获取了矩形的四个点的坐标,需要通过这四个点坐标对应矩形的左上、右上、左下、右下四个点,才能给后面的warpAffine仿射变换做铺垫。
函数 cv2.minAreaRect() 返回一个Box2D结构rect:(最小外接矩形的中心(x,y),(宽度,高度),旋转角度),但是要绘制这个矩形,我们需要矩形的4个顶点坐标box, 通过函数 cv2.cv.BoxPoints() 获得,返回形式[ [x0,y0], [x1,y1], [x2,y2], [x3,y3] ]。得到的最小外接矩形的4个顶点顺序、中心坐标、宽度、高度、旋转角度(是度数形式,不是弧度数)的对应关系如下:
6. 定车牌颜色
基本思路就是把上面重映射后的图片转换到HSV空间,然后通过统计全部像素的个数以及单个颜色对应的个数,如果满足蓝色占了全部像素的1/3及以上的时候,就认为这是一个蓝色车牌。
#Step6: Find correct place by color.
colorList = []
for index, imgPlat in enumerate(imgPlatList):
green = yellow = blue = 0
imgHsv = cv.cvtColor(imgPlat, cv.COLOR_BGR2HSV)
rows, cols = imgHsv.shape[:2]
imgSize = cols * rows
color = None
for row in range(rows):
for col in range(cols):
H = imgHsv.item(row, col, 0)
S = imgHsv.item(row, col, 1)
V = imgHsv.item(row, col, 2)
if 11 < H <= 34 and S > 34:
yellow += 1
elif 35 < H <= 99 and S > 34:
green += 1
elif 99 < H <= 124 and S > 34:
blue += 1
limit1 = limit2 = 0
if yellow * 3 >= imgSize:
color = "yellow"
limit1 = 11
limit2 = 34
elif green * 3 >= imgSize:
color = "green"
limit1 = 35
limit2 = 99
elif blue * 3 >= imgSize:
color = "blue"
limit1 = 100
limit2 = 124
print("Image Index[", index, '], Color:', color)
colorList.append(color)
print(blue, green, yellow, imgSize)
if color is None:
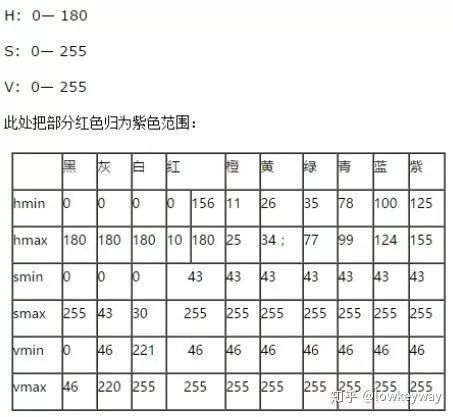
continue 附:
HSV空间下的颜色判断关系表。
7. 根据颜色重新裁剪、筛选图片
我们知道了车牌颜色之后,就可以通过逐行、逐列扫描,把车牌精确到更小的范围,这样还可以通过宽高比剔除一些不正确的矩形,而且还得到了精确唯一车牌图像内容!
def accurate_place(self, imgHsv, limit1, limit2, color):
rows, cols = imgHsv.shape[:2]
left = cols
right = 0
top = rows
bottom = 0
# rowsLimit = 21
rowsLimit = rows * 0.8 if color != "green" else rows * 0.5 # 绿色有渐变
colsLimit = cols * 0.8 if color != "green" else cols * 0.5 # 绿色有渐变
for row in range(rows):
count = 0
for col in range(cols):
H = imgHsv.item(row, col, 0)
S = imgHsv.item(row, col, 1)
V = imgHsv.item(row, col, 2)
if limit1 < H <= limit2 and 34 < S:# and 46 < V:
count += 1
if count > colsLimit:
if top > row:
top = row
if bottom < row:
bottom = row
for col in range(cols):
count = 0
for row in range(rows):
H = imgHsv.item(row, col, 0)
S = imgHsv.item(row, col, 1)
V = imgHsv.item(row, col, 2)
if limit1 < H <= limit2 and 34 < S:# and 46 < V:
count += 1
if count > rowsLimit:
if left > col:
left = col
if right < col:
right = col
return left, right, top, bottom
# Step7: Resize vehicle img.
left, right, top, bottom = self.accurate_place(imgHsv, limit1, limit2, color)
w = right - left
h = bottom - top
if left == right or top == bottom:
continue
scale = w/h
if scale < 2 or scale > 4:
continue
needAccurate = False
if top >= bottom:
top = 0
bottom = rows
needAccurate = True
if left >= right:
left = 0
right = cols
needAccurate = True
# imgPlat[index] = imgPlat[top:bottom, left:right] \
# if color != "green" or top < (bottom - top) // 4 \
# else imgPlat[top - (bottom - top) // 4:bottom, left:right]
imgPlatList[index] = imgPlat[top:bottom, left:right]
cv.imshow("Vehicle Image " + str(index), imgPlatList[index]) 
好了,我们终于拿到了最终结果,下一步就是把这里面的内容提取出来吧!
目前遇到的问题:
1. 获取矩形如果倾斜有角度,仿射变换后更偏了,不知道后面内容提取容易分离不。
全部代码:
import cv2 as cv
import numpy as np
from numpy.linalg import norm
import matplotlib.pyplot as plt
import sys, os, json, random
class LPRAlg:
maxLength = 700
minArea = 2000
def __init__(self, imgPath = None):
if imgPath is None:
print("Please input correct path!")
return None
self.imgOri = cv.imread(imgPath)
if self.imgOri is None:
print("Cannot load this picture!")
return None
# cv.imshow("imgOri", self.imgOri)
def accurate_place(self, imgHsv, limit1, limit2, color):
rows, cols = imgHsv.shape[:2]
left = cols
right = 0
top = rows
bottom = 0
# rowsLimit = 21
rowsLimit = rows * 0.8 if color != "green" else rows * 0.5 # 绿色有渐变
colsLimit = cols * 0.8 if color != "green" else cols * 0.5 # 绿色有渐变
for row in range(rows):
count = 0
for col in range(cols):
H = imgHsv.item(row, col, 0)
S = imgHsv.item(row, col, 1)
V = imgHsv.item(row, col, 2)
if limit1 < H <= limit2 and 34 < S:# and 46 < V:
count += 1
if count > colsLimit:
if top > row:
top = row
if bottom < row:
bottom = row
for col in range(cols):
count = 0
for row in range(rows):
H = imgHsv.item(row, col, 0)
S = imgHsv.item(row, col, 1)
V = imgHsv.item(row, col, 2)
if limit1 < H <= limit2 and 34 < S:# and 46 < V:
count += 1
if count > rowsLimit:
if left > col:
left = col
if right < col:
right = col
return left, right, top, bottom
def findVehiclePlate(self):
def zoom(w, h, wMax, hMax):
# if w <= wMax and h <= hMax:
# return w, h
widthScale = 1.0 * wMax / w
heightScale = 1.0 * hMax / h
scale = min(widthScale, heightScale)
resizeWidth = int(w * scale)
resizeHeight = int(h * scale)
return resizeWidth, resizeHeight
def pointLimit(point, maxWidth, maxHeight):
if point[0] < 0:
point[0] = 0
if point[0] > maxWidth:
point[0] = maxWidth
if point[1] < 0:
point[1] = 0
if point[1] > maxHeight:
point[1] = maxHeight
if self.imgOri is None:
print("Please load picture frist!")
return False
# Step1: Resize
img = np.copy(self.imgOri)
h, w = img.shape[:2]
imgWidth, imgHeight = zoom(w, h, self.maxLength, self.maxLength)
print(w, h, imgWidth, imgHeight)
img =cv.resize(img, (imgWidth, imgHeight), interpolation=cv.INTER_AREA)
cv.imshow("imgResize", img)
# Step2: Prepare to find contours
img = cv.GaussianBlur(img, (3, 3), 0)
imgGary = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow("imgGary", imgGary)
kernel = np.ones((20, 20), np.uint8)
imgOpen = cv.morphologyEx(imgGary, cv.MORPH_OPEN, kernel)
cv.imshow("imgOpen", imgOpen)
imgOpenWeight = cv.addWeighted(imgGary, 1, imgOpen, -1, 0)
cv.imshow("imgOpenWeight", imgOpenWeight)
ret, imgBin = cv.threshold(imgOpenWeight, 0, 255, cv.THRESH_OTSU + cv.THRESH_BINARY)
cv.imshow("imgBin", imgBin)
imgEdge = cv.Canny(imgBin, 100, 200)
cv.imshow("imgEdge", imgEdge)
kernel = np.ones((10, 19), np.uint8)
imgEdge = cv.morphologyEx(imgEdge, cv.MORPH_CLOSE, kernel)
imgEdge = cv.morphologyEx(imgEdge, cv.MORPH_OPEN, kernel)
cv.imshow("imgEdgeProcessed", imgEdge)
# Step3: Find Contours
image, contours, hierarchy = cv.findContours(imgEdge, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
contours = [cnt for cnt in contours if cv.contourArea(cnt) > self.minArea]
# Step4: Delete some rects
carPlateList = []
imgDark = np.zeros(img.shape, dtype = img.dtype)
for index, contour in enumerate(contours):
rect = cv.minAreaRect(contour) # [中心(x,y), (宽,高), 旋转角度]
w, h = rect[1]
if w < h:
w, h = h, w
scale = w/h
if scale > 2 and scale < 4:
# color = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255))
color = (255, 255, 255)
carPlateList.append(rect)
cv.drawContours(imgDark, contours, index, color, 1, 8)
box = cv.boxPoints(rect) # Peak Coordinate
box = np.int0(box)
# Draw them out
cv.drawContours(imgDark, [box], 0, (0, 0, 255), 1)
cv.imshow("imgGaryContour", imgDark)
print("Vehicle number: ", len(carPlateList))
# Step5: Rect rectify
imgPlatList = []
for index, carPlat in enumerate(carPlateList):
if carPlat[2] > -1 and carPlat[2] < 1:
angle = 1
else:
angle = carPlat[2]
carPlat = (carPlat[0], (carPlat[1][0] + 5, carPlat[1][1] + 5), angle)
box = cv.boxPoints(carPlat)
# Which point is Left/Right/Top/Bottom
w, h = carPlat[1][0], carPlat[1][1]
if w > h:
LT = box[1]
LB = box[0]
RT = box[2]
RB = box[3]
else:
LT = box[2]
LB = box[1]
RT = box[3]
RB = box[0]
for point in [LT, LB, RT, RB]:
pointLimit(point, imgWidth, imgHeight)
# Do warpAffine
newLB = [LT[0], LB[1]]
newRB = [RB[0], LB[1]]
oldTriangle = np.float32([LT, LB, RB])
newTriangle = np.float32([LT, newLB, newRB])
warpMat = cv.getAffineTransform(oldTriangle, newTriangle)
imgAffine = cv.warpAffine(img, warpMat, (imgWidth, imgHeight))
cv.imshow("imgAffine" + str(index), imgAffine)
print("Index: ", index)
imgPlat = imgAffine[int(LT[1]):int(newLB[1]), int(newLB[0]):int(newRB[0])]
imgPlatList.append(imgPlat)
cv.imshow("imgPlat" + str(index), imgPlat)
#Step6: Find correct place by color.
colorList = []
for index, imgPlat in enumerate(imgPlatList):
green = yellow = blue = 0
imgHsv = cv.cvtColor(imgPlat, cv.COLOR_BGR2HSV)
rows, cols = imgHsv.shape[:2]
imgSize = cols * rows
color = None
for row in range(rows):
for col in range(cols):
H = imgHsv.item(row, col, 0)
S = imgHsv.item(row, col, 1)
V = imgHsv.item(row, col, 2)
if 11 < H <= 34 and S > 34:
yellow += 1
elif 35 < H <= 99 and S > 34:
green += 1
elif 99 < H <= 124 and S > 34:
blue += 1
limit1 = limit2 = 0
if yellow * 3 >= imgSize:
color = "yellow"
limit1 = 11
limit2 = 34
elif green * 3 >= imgSize:
color = "green"
limit1 = 35
limit2 = 99
elif blue * 3 >= imgSize:
color = "blue"
limit1 = 100
limit2 = 124
print("Image Index[", index, '], Color:', color)
colorList.append(color)
print(blue, green, yellow, imgSize)
if color is None:
continue
# Step7: Resize vehicle img.
left, right, top, bottom = self.accurate_place(imgHsv, limit1, limit2, color)
w = right - left
h = bottom - top
if left == right or top == bottom:
continue
scale = w/h
if scale < 2 or scale > 4:
continue
needAccurate = False
if top >= bottom:
top = 0
bottom = rows
needAccurate = True
if left >= right:
left = 0
right = cols
needAccurate = True
# imgPlat[index] = imgPlat[top:bottom, left:right] \
# if color != "green" or top < (bottom - top) // 4 \
# else imgPlat[top - (bottom - top) // 4:bottom, left:right]
imgPlatList[index] = imgPlat[top:bottom, left:right]
cv.imshow("Vehicle Image " + str(index), imgPlatList[index])
if __name__ == '__main__':
L = LPRAlg("3.jfif")
L.findVehiclePlate()
cv.waitKey(0)下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~