最全的工业机器人知识介绍,没有之一!
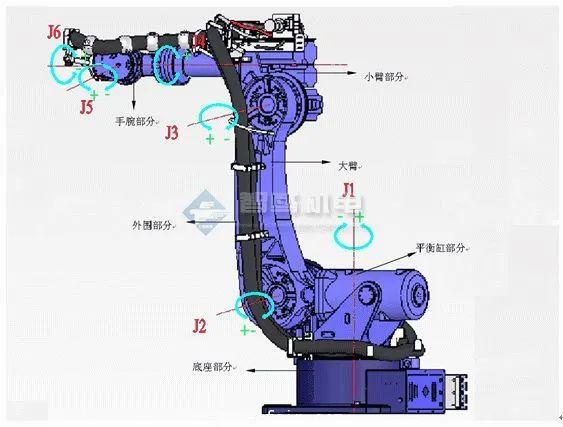
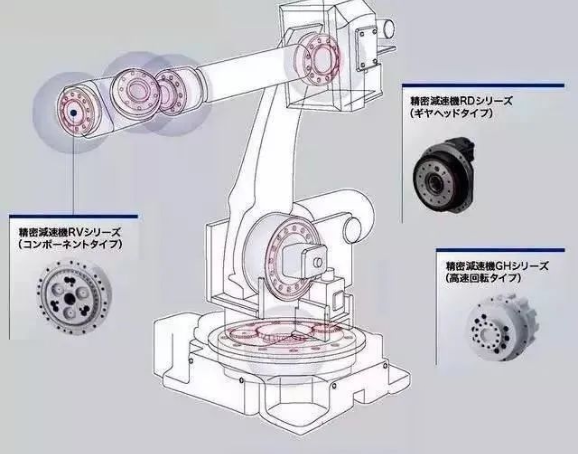
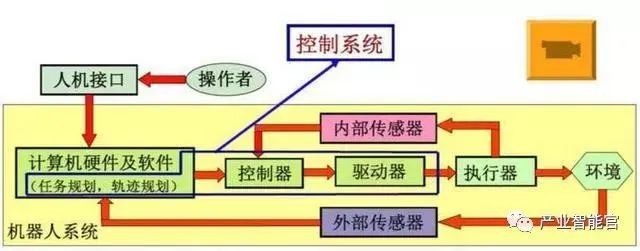
工业机器人广泛使用在产业制造上,汽车制造、电器、食品等,能替代反复机器式操纵工作,是靠本身动力和控制才能来实现种种功用的一种机器。它能够承受人类指挥,也能够按照事先编排的程序运转。今天我们讲讲工业机器人基本主要构成部分。




 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的,文章版权归原作者所有。如有不妥,请联系删除。
评论
 下载APP
下载APP工业机器人广泛使用在产业制造上,汽车制造、电器、食品等,能替代反复机器式操纵工作,是靠本身动力和控制才能来实现种种功用的一种机器。它能够承受人类指挥,也能够按照事先编排的程序运转。今天我们讲讲工业机器人基本主要构成部分。
End
声明:部分内容来源于网络,仅供读者学术交流之目的,文章版权归原作者所有。如有不妥,请联系删除。