
手眼标定的两种方式
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自:新机器视觉
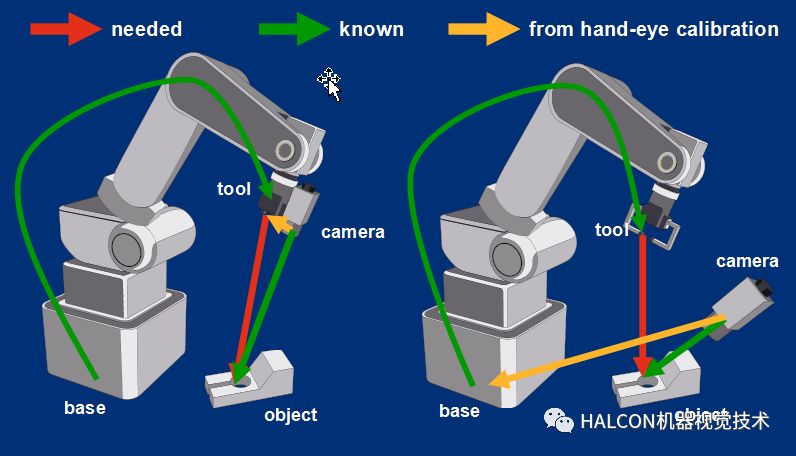
首先讲一下在工业应用中,手和眼(摄像机)的两种位置关系,第一种是将摄像机(眼)固定在机械手(手)上面,眼随手移动;第二种是摄像机(眼)和机械手(手)分离,眼的位置相对于手是固定的,下面用网上的两张图来说明下:
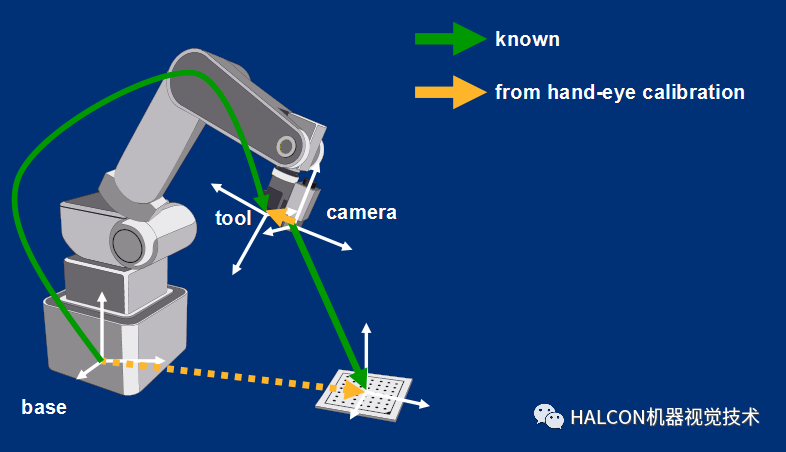
一种情况:相机移动
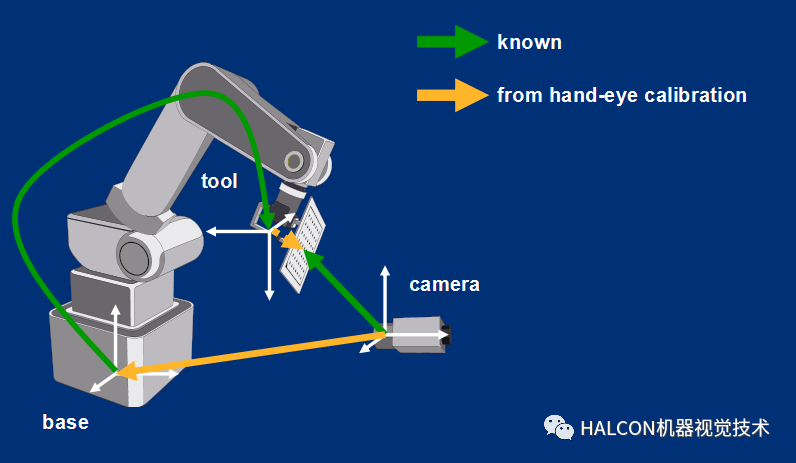
第二种情况:相机固定
从上面两副示意图可以看出,第一种情况中我们要求的是相机坐标系和机械手坐标系的转化关系;第二种情况中要求的是相机坐标系和基础坐标系的关系;下面分别阐述其求解过程。
在推导过程中,我们会用到四个坐标系,分别是基础坐标系,机械手坐标系,相机坐标系,以及标定物坐标系,下面先给出示意图:
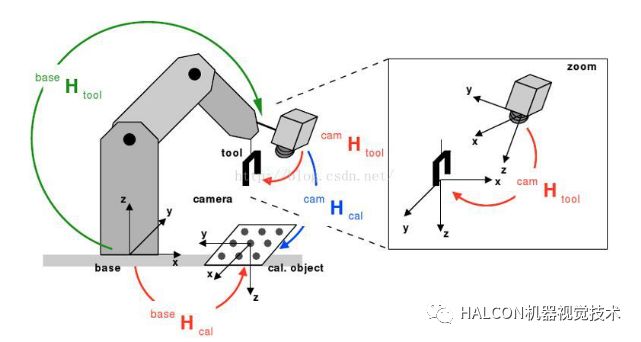
坐标系示意图
其中baseHcal表示基础坐标系到标定物坐标系的转化关系,包括旋转矩阵和平移向量;camHtool表示相机坐标系到机械手坐标系的转化关系;这两个转化关系在机械手移动过程中是不变的;camHcal可以由相机标定求出;baseHtool可以由机器人系统中得出。
接下来控制机器手从位置 1 移动到位置 2:
base = baseHtool (1)* tool(1)
tool(1) = inv(camHtool)*cam(1)
cam(1) = camHcal(1)*obj
联合上面三个公式:
base = baseHtool (1)* inv(camHtool)* camHcal(1)*obj
移动到机械手臂到位置2后:
base = baseHtool (2)* inv(camHtool)* camHcal(2)*obj
因为base和obj是固定的所以:
baseHtool (1)* inv(camHtool)* camHcal(1)=baseHtool (2)* inv(camHtool)* camHcal(2)
其中只有camHtool是未知量,具体求解过程将放在下篇文章。
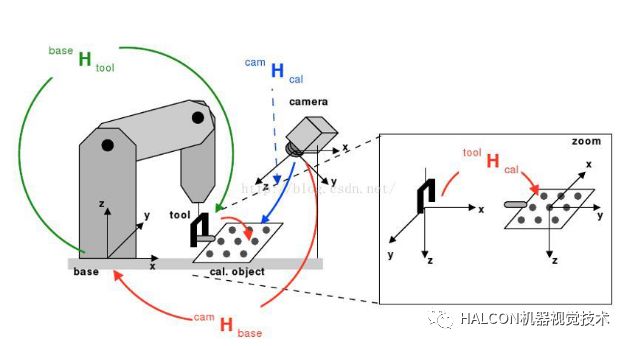
坐标系示意图
对于固定相机的情况,还是控制机械手从位置1移动到位置2:
obj(1) = inv(camHcal(1)) *cam
cam = camHbase *base
base = baseHtool(1) * tool(1)
合并上面三个公式:
obj(1) = inv(camHcal(1)) * camHbase* baseHtool(1) *tool(1)
移动到位置2后:
obj(2) = inv(camHcal(2)) * camHbase* baseHtool(2) *tool(2)
因为obj和tool的相对位置是不变的,所以不管怎么移动:
inv(camHcal(1)) * camHbase* baseHtool(1)= inv(camHcal(2)) * camHbase* baseHtool(2)
其中变量只有camHbase,也就是我们要求的。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~