
NG多次!波士顿动力Atlas跑酷是这样「摔」出来的
新智元报道
新智元报道
来源:venturebeat
编辑:yaxin
【新智元导读】近日,波士顿动力Atlas学会了新的跑酷技能,着实震撼了一波网友。看着这套行云流水的动作,背后到底有没有「预设程序」?波士顿动力工程师带你揭秘Atlas的背后技术。
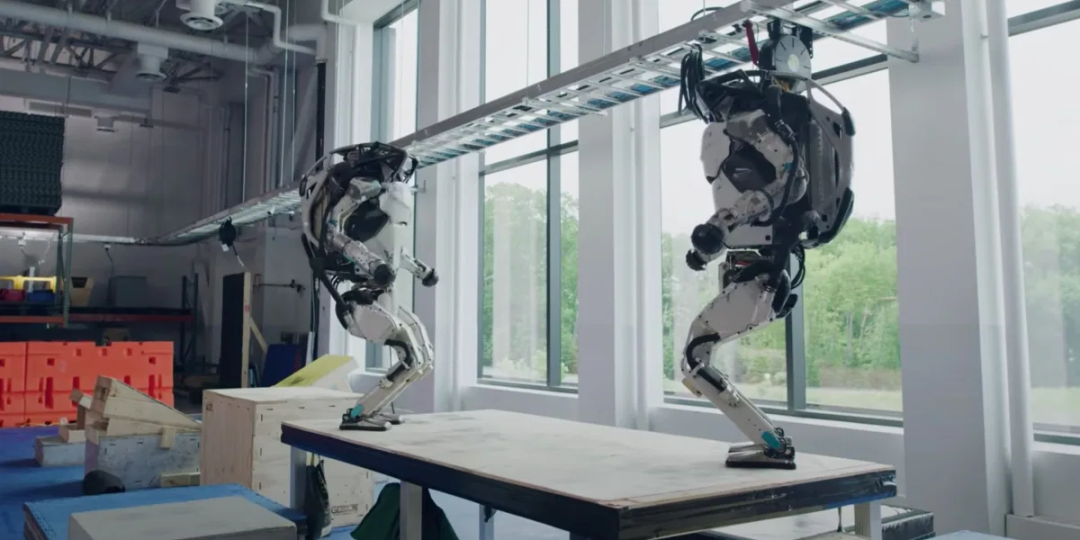
波士顿动力机器人get跑酷技能,吸引了一大波网友。
当你了解工程师们如何开发和训练Atlas进行跑酷,就会真的被震撼到!

一心只想搞研发
2013年,Atlas首次公布,被认为是世界上最先进的双足机器人。
波士动力公司研发近十年。一直以来,他们对Atlas目前的研发定位明确,
只称自己的产品是研发工具:Atlas只是推动机器人技术前沿的一种方式,但尚未接近商业部署。

这并不是因为双足机器人在商业上没有用处。
如果两足机器人能像我们一样行走表面和操作物体,那么它将拥有无限的实用价值,成为机器人行业最赚钱的商机之一。
相对于目前的移动机器人,它有很大的不足之处,因为移动机器人仅限于特定的环境 (平地、均匀的照明、平面物体等) ,或者需要改变环境以适应它们的限制性。
然而,双足机器人的制造更是难上加难。
即使是迄今为止最先进的双足机器人Atlas,距离达到人类运动技能还有很长的路要走。
就在公布的视频中,就会发现一次次摔倒的Atlas。
机器人眼中的跑酷世界
那么对于波士顿动力Atlas来说,是如何探索出实现「跑酷」这一动作呢?
在机器人Atlas的大脑中,有一个模糊的地图「轮廓」。
为了执行扩展的跑酷行为,波士顿动力的研发团队为机器人提供了一张高级地图,其中包括研发人员希望它去的地方以及沿途它应该做的动作。
该地图与真实路线的几何形状不完全匹配,而是一个包含障碍模板和注释动作的近似描述。
Atlas 使用这些稀疏信息来导航,并使用实时感知数据来填充细节。
同时,Atlas还会拿到一些目标信息,例如在行动中需要完成什么动作、会遇到什么样的障碍物。
虽然 Atlas 使用集成 IMU、联合位置和力传感器来控制自身的肢体动作,并通过感知地面来保持平衡,但它需要利用「感知」来识别和导航间隙和窄梁等障碍。
深度相机的点云旋转视图
比如,Atlas知道地图上会出现一个盒子,它要做的动作是跳上去。
这个盒子可能会与地图的标注相差甚远,甚至往旁边移动了0.5米,但它仍然能靠感知算法,正确找到这个盒子并跳上去。
对于,Atlas 在跑酷中所做的每个动作都源自使用轨迹优化提前创建的模板。
通过创建这些模板库允许研究者向库中添加新的轨迹,从而可以不断为机器人添加新的功能。
也就是说,无论是翻越、跑、跳跃、后空翻,Atlas在跑酷过程中的每一个动作,都需要提前设计好,并被放进模板库中。

双足机器人挑战重重
和人类一样,学习和成长是同步的。
身体和大脑的发育,让我们一步步学会了爬行、站立、走路、跑步、跳跃和做运动。
但是对于机器人来说,要做到这些难度可想而知。
机器人工程师从一个完全开发的机器人开始,会反复调整,并且必须教会机器人有效使用身体所需的所有技能。
波士顿动力公司的工程师通过创建模型和优化目标对跑酷机器人进行优化,将有助于它们实现双足动作技能。

但是,机器人仍然需要一些在所有灵长类动物身上都能看到的基本技能。
比如,在某些情况下,当Atlas跳跃失去平衡时,它的脸就会完全着地。
在这种情况下,灵长类动物会本能地伸展它们的手臂以减轻坠落的冲击,并保护它们的头部、颈部、眼睛和其他重要部位。
像跑酷跑道这样复杂的环境有助于发现和解决这些挑战,其速度远远快于平坦而又简单的环境。
参考资料:
https://venturebeat.com/2021/08/27/inside-boston-dynamics-project-to-create-humanoid-robots/
