
ORB特征均匀提取策略对性能的提升有多大?
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自:计算机视觉life
在ORB-SLAM(2)的论文中,作者提到了一种使图像中提取的ORB特征分布更加均匀的方法。这种策略是否有助于提高SLAM的性能?为什么作者不使用OpenCV中的ORB特征提取的实现?本文将通过实验,比较这两种ORB特征提取方法对ORB-SLAM2性能的影响。
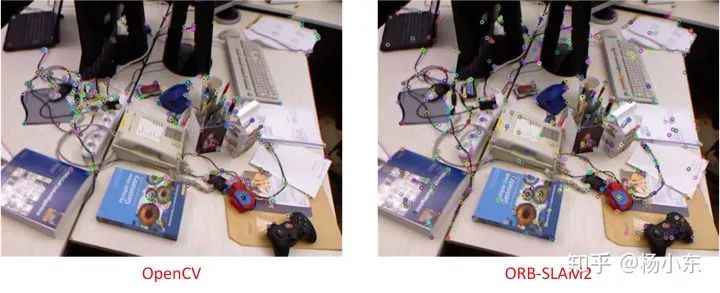
随便从TUM数据集中取出一张照片,分别使用OpenCV的实现和ORB-SLAM2的实现提取1000个ORB特征,效果如下图。很明显,OpenCV提取的特征点比较集中,出现了扎推现象。而ORB-SLAM2提取的特征点,分布比较均匀。
直观上想象,特征点分布比较集中,极端情况就是所有特征都集中到了一点,那么相机的位姿就无法解算。特征点分布太过集中,SLAM系统的精度可能会有所下降。下面,通过实验验证这一想象。
实验条件:
数据集: TUM RGB-D数据集中的6个序列 (严谨的说,以下结论目前只适用于RGB-D相机,没有测试单目和双目的效果)
系统:Ubuntu 16.04
CPU: Intel® Core™ i7-8700 CPU @ 3.20GHz × 12
OpenCV: 3.3.1
ORB-SLAM2参数配置:使用ORB-SLAM2原版配置
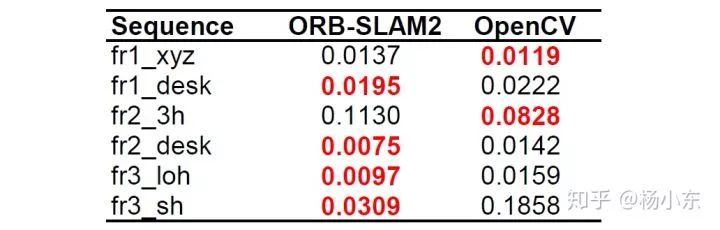
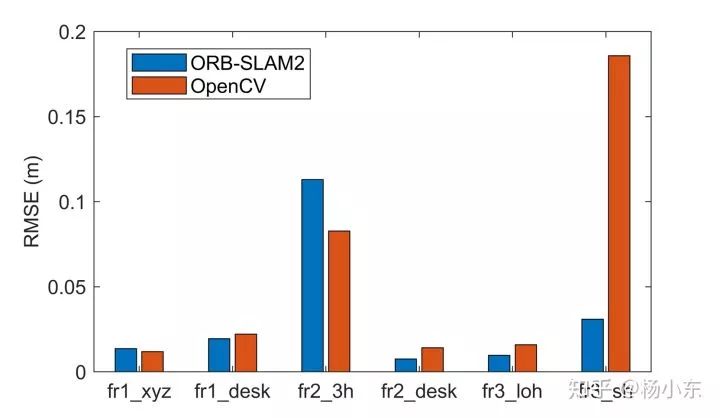
轨迹精度对比
采用的评测标准是absolute trajectory error(ATE) RMSE, 结果见下图。大部分序列下,ORB-SLAM2版本的精度更高。fr1_xyz序列,OpenCV版本的精度稍高,但是和ORB-SLAM2的精度也差不太多。而OpenCV的版本在fr2_3h序列中出现了跟丢现象,直到最后也没有找回,所以测试轨迹精度的数据只占了整个序列开始很小一部分,在轨迹精度上稍显高一些。实际上,fr2_3h的序列中,相机运动的较快,场景中也距离相机较远,光线也不好。ORB-SLAM版本在所有序列上都没有跟丢,因此鲁棒性更高。总之,ORB-SLAM2的均匀化特征提取的策略提高了系统的精度和鲁棒性。
 轨迹误差
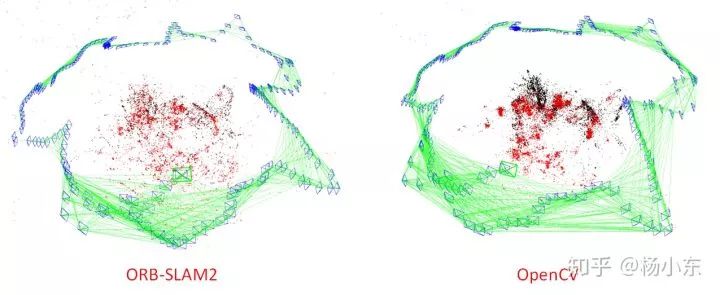
轨迹误差就ORB-SLAM2的版本而言,地图点比较均匀和稀疏,关键帧之间的边相对较少。这似乎表明ORB-SLAM2的均匀提取策略降低了特征的重复性,不利于保证同一个特征在多帧之间都提取到。
而OpenCV版本的地图点比较集中,这是由于OpenCV选择响应最高的点所导致的。关键帧之间的边也更加密集,这似乎说明响应高的那些ORB特征点具有更好的复现性,可以在连续的更多帧重复提取、跟踪。但是,需要注意的是,这些特征点都集中在一起,即便形成了更强大的网络,获得的估计精度还是没有ORB-SLAM2版本的高。也就是说,特征点均匀分布是可以提高系统精度的。
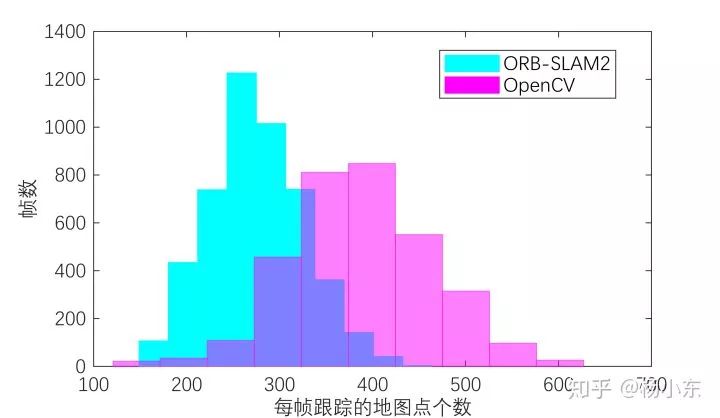
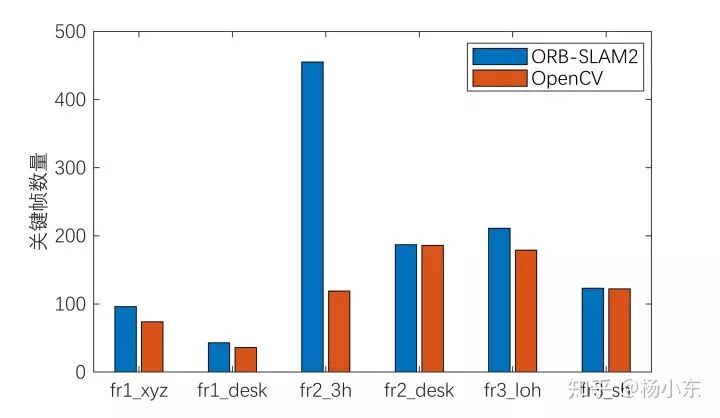
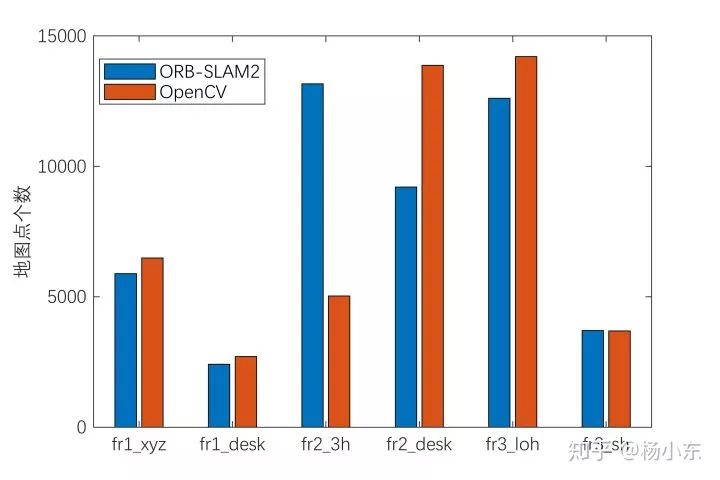
下面再看一下,在fr2_desk序列中,每个frame追踪到的地图点的个数。ORB-SLAM2版本相对于OpenCV版本追踪的地图点数量要少,这也与上图中OpenCV版本的关键帧网络更加稠密相互印证。但是,这并不能表明ORB-SLAM2追踪的质量差,因为有可能是ORB-SLAM2的地图点的数量本来就少呢?所以我又统计了以下地图中关键帧的数量和地图点的数量。ORB-SLAM2版本的关键帧数量比OpenCV版本的还多,但是地图点的数量没有OpenCV版本的多。ORB-SLAM2版本中,地图点少,关键帧多,原因可能是1. ORB特征的复现性不好,不能在较多帧之间追踪,构造更多的地图点。2. 均匀化的提取策略提取的特征点数量没有OpenCV原版实现中提取特点数多。(这两点目前没有验证。)
值得注意的是,虽然ORB-SLAM2版本每一帧跟踪的特征点数少,但是最终的轨迹精度却很高。这就体现出ORB-SLAM2特征提取方法的优越性了,可能是特征点分布比较均匀的功劳。OpenCV版本跟踪的点数虽多,但是这些点比较集中。
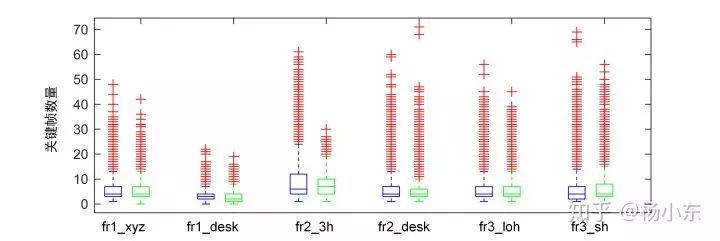
提取ORB特征,一是为了构造地图点,二是为了实现数据关联。一个ORB特征点对应的地图点被越多的帧观测到,那么就能形成越强大的Graph,从而也能保证系统的精度。也就是说,多帧之间的ORB特征应具有很好的重复性,这样才能保证形成强大的网络。一个地图点能够被越多的帧观测到越好。于是,我统计了每个特征点相连的关键帧数量。从这幅图似乎感觉两种特征提取方法差别不大,可能对数据影响最大的是实验环境和运动轨迹吧?
ORB-SLAM2的特征提取时间为10.24±2.64 ms,OpenCV的特征提取时间为9.11±2.82 ms。两者差别不大。
ORB-SLAM2中的ORB特征提取方法相对于OpenCV中的方法,提高了ORB-SLAM2的轨迹精度和鲁棒性。增加特征提取的均匀性可以提高系统精度,但是似乎会降低特征提取的重复性。
我只用了TUM RGB-D数据集的6个序列来测试,因此相关结论仅供参考。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~