
AI部署篇 | CUDA学习笔记2:矩阵乘法与GPU优化(附CUDA代码)

1学习笔记2——矩阵相乘与共享内存
1、矩阵乘法 CPU 实现
CPU程序通过三层循环实现:
void matrixMulCpu(float* A, float* B, float* C, int width){
float sum = 0.0f;
for(int i = 0; i < width; i++){
for(int j = 0; j < width; j++){
for(int l = 0; l < width; l++){
sum += A[i * width + l] * B[l * width + j];
}
C[i * width + j] = sum;
sum = 0.0f;
}
}
}
通过上面CPU代码的实验观察可以看出,总共的计算次数为:
时间复杂度为:
2、GPU实现矩阵乘法
获得 C 矩阵的计算方法都是相同的,只不过使用的是矩阵 A、B 不同的元素来进行计算,即不同数据的大量相同计算操作,这种计算是特别适合使用GPU来计算,因为GPU拥有大量简单重复的计算单元,通过并行就能极大的提高计算效率。
在 GPU 中执行矩阵乘法运算操作:
在 Global Memory 中分别为矩阵 A、B、C 分配存储空间; 由于矩阵 C 中每个元素的计算均相互独立,NVIDIA GPU 采用的 SIMT (单指令多线程)的体系结构来实现并行计算的, 因此在并行度映射中,让每个 thread 对应矩阵 C 中1个元素的计算; 执行配置 (execution configuration)中 gridSize 和 blockSize 均有 x(列向)、y(行向)两个维度,其中,
CUDA的kernel函数实现如下:

每个 thread 需要执行的 workflow 为:
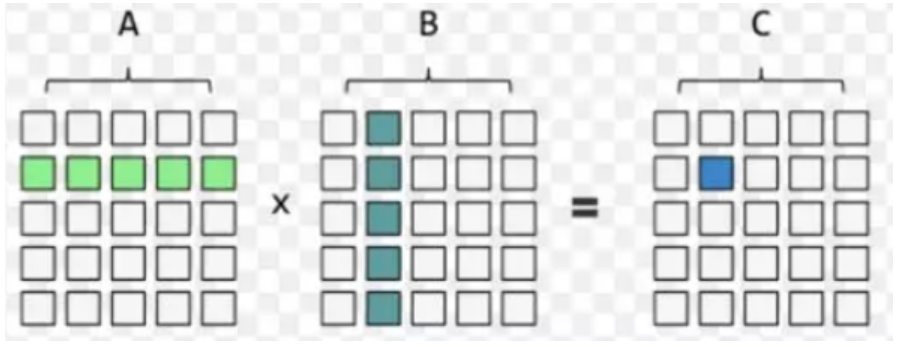
从矩阵 A 中读取一行向量 (长度为width) ==> A[Row * width + i] 从矩阵 B 中读取一列向量 (长度为width(图中为height)) ==> B[i * width + Col] 对这两个向量做点积运算 (单层 width 次循环的乘累加)==> A[Row * width + i] * B[i * width + Col] 最后将结果写回矩阵 C。==> C[Row * width + Col] = Pervalue
//核函数的具体实现
__global__ void matMul_GlobalKernel(int *A,int *B,int *C,int width){
int bx = blockIdx.x;
int by = blockIdx.y;
int tx = threadIdx.x;
int ty = threadIdx.y;
int Col = bx * blockDim.x + tx;
int Row = by * blockDim.y + ty;
int perValue = 0;
for(int i = 0; i < width; i++){
perValue += A[Row * width + i] * B[i * width + Col];
}
C[Row * width + Col] = Pervalue;
}
下面来分析一下该 kernel 函数中 A、B、C 三个矩阵对 Global memory 的读取和写入情况:
读取 Global Memory:
对于矩阵 C 中每一个元素计算,需要读取矩阵 A 中的一行元素;
对于矩阵 C 中同一行的 width 个元素,需要重复读取矩阵 A 中同一行元素 width 次;
对于矩阵 C 中每一个元素计算,需要读取矩阵 B 中的一列元素;
对于矩阵 C 中同一列的 width 个元素,需要重复读取矩阵 B 中同一列元素 width 次;
写入 Global Memory:
矩阵 C 中的所有元素只需写入一次
由此可见:
对 A 矩阵重复读取 width 次,共计 次 32 bit Global Memory Load操作; 对 B 矩阵重复读取 width 次,共计 次32 bit Global Memory Load操作; 对 C 矩阵共计 次 32 bit Global Memory Store操作。
在上述分析中是将每一个 32 bit 元素 (或者说每个thread)对 Global memory 的访问 (access)独立对待的;但实际情况是如此吗?
假设矩阵规模为 width=32,执行配置 blockSize=(32, 32, 1),gridSize=(1, 1, 1),使用上述的 Kernel 函数进行计算,在 NVVP 中 Memory Bandwidth Analysis 结果如下:
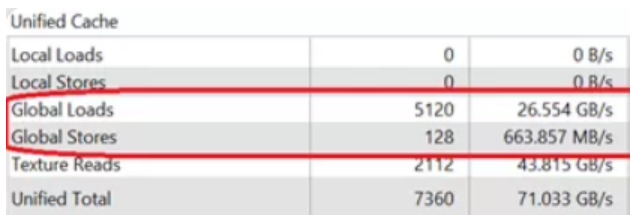
按照前面的计算方式,Global Memory Load 次数为次,Store 次数为 1024 次;而 NVVP 显示的读取次数为 5120 次;写入次数为 128 次, 这到底是为什么呢?
别有洞天之 Warp
GPU 编程中最重要的概念之一是 warp,每个 warp 包含 32 个 thread,而 GPU 的指令发射是以 warp 为最小单元的。当 warp 中的一条指令发射一次,称为 1 次 “transaction”,重复发射一次, 称为 1 次 “reply”。
对于 Global Memory 的访问,warp 内的指令需要几次 transaction,或者说是否会发生 reply,取决于地址对齐及可合并访问的情况。
Global Memory 的读/写访问均是以 32 Byte 为单元的,称为 1 个 segment,即 1 transaction 可访问 32 Byte 数据 (假设 L1 cache 为 non-caching)。假设 1 个 warp 中的每个 thread 需要访问 1 个 32 bit (=4 Byte)数据,且访问地址是 32 Byte 对齐的,则总共需要访问 4 个 segments,即产生 4 次 transaction (即 3 次 reply)指令发射。
接下来重新分析矩阵乘法中Global Memory访问的情况:
Global Memory Load:对于 1 个 warp 中的 32 个 thread,在每 1 次循环中,需要读取矩阵 A 同一个元素 (1 次 transaction),以及矩阵 B 连续的 32 个元素 (假设是理想的可合并访问的,至少需要 4 次 transaction),共发生 5 次 transaction (注意,并不是前文的 32+32 次)。K 次循环总共需要 k×5次 transactions。对于 个 thread, 共有 个 warp,总共的 Global Memory Load Transaction 数目为: (注意,并不是前文的 ).Global Memory Store:矩阵 C 的写入过程中,每个 warp 中的 32 thread 可连续写入 32 个 32 bit 元素 (4次 transaction),对于个 thread,共有个 warp,总共的 Global Memory Store Transaction 数目为:次 transaction。
对于前面验证矩阵, 其规模为width=32, 执行配置blockSize=(32,32,1), gridSize=(1,1,1),
Global Memory Load Transaction数目为: width×width÷32×width×5=32×32÷32×32×5=5120
分析结果与 NVVP 中 GPU 实际执行结果是完全吻合的。
width*width*width\Blocksize 对计算性能的影响
| width*width*width\blocksize | 8*8 | 16*16 | 32*32 |
|---|---|---|---|
| 8*8*8 | 0.197 | NA | NA |
| 16*16*16 | 1.890 | 1.921 | NA |
| 32*32*32 | 15.675 | 12.810 | 13.409 |
| 64*64*64 | 117.014 | 101.927 | 71.828 |
| 128*128*128 | 633.439 | 649.165 | 346.142 |
| 256*256*256 | 1125.477 | 1268.391 | 1511.790 |
| 512*512*512 | 1301.495 | 1332.036 | 1391.029 |
| 1024*1024*1024 | 1386.940 | 1295.104 | 1361.126 |
| 2028*2048*2048 | 1215.287 | 1144.767 | 1237.371 |
| 4096*4096*4096 | 799.716 | 1091.926 | 1153.420 |
结果分析:
随着矩阵规模增大,计算性能不断提升,到达峰值后又略有下降。在矩阵规模较小时,由于block数量不够多,无法填满所有SM单元,此时的性能瓶颈为Latency Bound(由于低Occupancy导致GPU计算资源的利用率低,延迟无法被很好的隐藏);随着矩阵规模增加,block数量增加,每个SM中的active warps数量随之增大,此时Latency不再是性能瓶颈,转而受限于Memory Bound(过多的高延迟、低带宽的全局内存访问),在无法提升memory访问效率的情况下,性能无法进一步提升;
不同的blockSize对性能的影响不大(这里仅限于讨论8*8、16*16、32*32三种情况)。究其原因,是因为选择的几种block维度设计(每行分别有8/16/32个thread),对1个warp内访问Global Memory时(Load或Store)transaction的数量没有变化。
3、Shared Memory 优化矩阵乘法
虽然 warp 内对 Global Memory 的访问均已最大的实现了合并访问,但在 A、B 矩阵的读取操作中仍然有很多重复访问,例如:
对于矩阵 A 的读取操作,通过合并访问(32 个 thread 访问 Global Memory 的同一地址,合并为一次访问),实际重复读取次数是(n/32);
对于矩阵 B 的读取操作,通过合并访问(8 个 thread 访问 32 Byte 数据可合并为一次),实际重复读取次数为(m/8)次。
在不改变这种数据读取方式的前提下又如何优化性能呢?
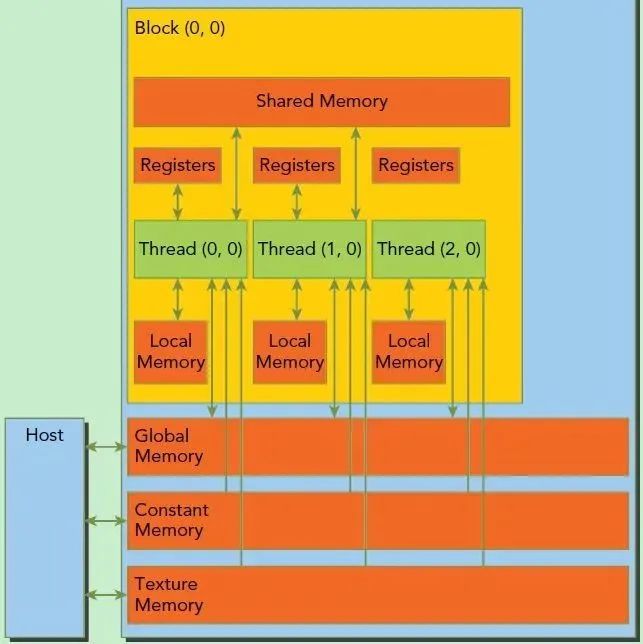
在GPU中除了 Global Memory 还有 Shared Memory,这部分 Memory 是在芯片内部的,相较于 Global Memory 400~600 个时钟周期的访问延迟,Shared Memory 延时小 20-30 倍、带宽高 10 倍,具有低延时、高带宽的特性。因此性能优化的问题可以转变为如何利用 Shared Memory 代替 Global Memory 来实现数据的重复访问。
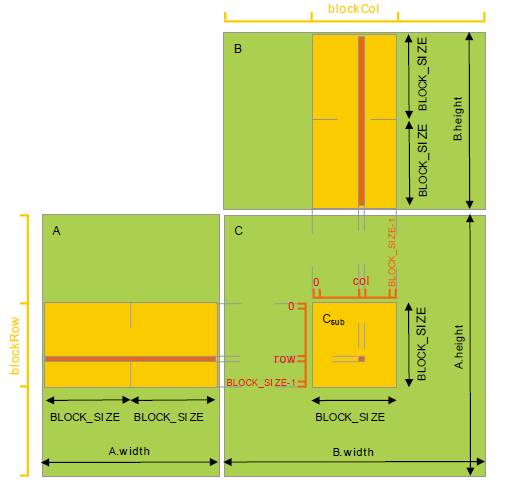
如上图所示,使用 Shared Memory 优化 Global Memory 访问的基本思想是充分利用数据的局部性。
让一个 block 内的 thread 先从 Global Memory 中读取子矩阵块数据(大小为 BLOCK_SIZE × BLOCK_SIZE)并写入 Shared Memory 中;在计算时,从 Shared Memory 中(重复)读取数据做乘累加,从而避免每次都到 Global 中取数据带来的高延迟影响。接下来让子矩阵块分别在矩阵 A 的行向以及矩阵 B 的列向上滑动,直到计算完所有 width 个元素的乘累加。使用 Shared Memory 优化后的 kernel 代码如下所示:
//核函数的具体实现
__global__ void matmul_ShareMemory(int *M,int *N,int *P,int width){
__shared__ float Mds[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float Nds[BLOCK_SIZE][BLOCK_SIZE];
int bx = blockIdx.x;
int by = blockIdx.y;
int tx = threadIdx.x;
int ty = threadIdx.y;
int Col = bx * BLOCK_SIZE + tx;
int Row = by * BLOCK_SIZE + ty;
int Pervalue = 0;
//有多少个BLOCK_SIZE,每个循环计算一个块的大小
for(int i = 0;i < width / BLOCK_SIZE;i++){
Mds[ty][tx] = M[Row * width + (i * BLOCK_SIZE + tx)];
Nds[ty][tx] = N[Col + (i * BLOCK_SIZE + ty) * width];
__syncthreads();
//BLOCK_SIZE相乘
for(int k = 0;k < BLOCK_SIZE;k++)
Pervalue += Mds[ty][k] * Nds[k][tx];
__syncthreads();
}
P[Row * width + Col] = Pervalue;
}
1 个 block 即看做 1 个子矩阵 C,且为方阵; 读取子矩阵 A 和子矩阵 B 的 Shared Memory 的大小均等于子矩阵 C 的维度大小; 子矩阵 A 在矩阵 A 的行向上移动 width/BLOCK_SIZE 次,子矩阵 B 在矩阵 B 的列向上移动 width / BLOCK_SIZE 次; 每个 thread 的计算过程,由原来的单层 k 次循环,变为了两层循环:外层循环次数为 width / BLOCK_SIZE(假设能够整除),其任务是从 Global Memory 读取数据到 Shared Memory;内存循环次数为 BLOCK_SIZE,其任务是读取 Shared Memory 中的数据做乘累加计算; 有 2 次 __syncthreads()操作:第一次表示同步 Shared Memory 中数据写入之后,在进入计算之前,保证block内所有Shared Memory中数据已更新;第二次表示同步计算之后以及 Shared Memory 写入之前,保证 block 内所有 thread 的计算已完成,可以进行 Shared Memory 的数据更新。
Shared Memory 性能分析
| width* width* width\blocksize | 8*8 | 16*16 | 32*32 |
|---|---|---|---|
| 8*8*8 | 0.229 | – | – |
| 16*16*16 | 1.592 | 1.878 | – |
| 32*32*32 | 12.242 | 15.269 | 15.334 |
| 64*64*64 | 102.352 | 116.184 | 95.163 |
| 128*128*128 | 501.691 | 730.729 | 486.994 |
| 256*256*256 | 1560.865 | 2001.799 | 2194.816 |
| 512*512*512 | 1758.115 | 2993.400 | 3004.314 |
| 1024*1024*1024 | 1618.022 | 3120.376 | 3821.940 |
| 2048*2048*2048 | 1213.414 | 2893.394 | 3800.826 |
| 4096*4096*4096 | 875.712 | 2708.951 | 3824.857 |
随着矩阵规模增大,计算性能不断提升,到达峰值后又略有下降——这与未优化前使用 Global Memory 时的性能分析结果一致;
不同 blockSize 对性能影响很大。外层循环中从 Global Memory 读取数据写入到 Shared Memory 时,无论是读取 A 矩阵或 B 矩阵,当 warp 的组织形式(行x列)为 8x4 或 16x2,对于 Global Memory 的 load 操作,均可实现 32B 的合并访问(8 thread x 4B 及 4 次 transactions)。而对于 Shared Memory 的 Store 操作,则会出现 Bank Conflict 导致 reply 的发生;同样地,内层循环中读取 Shared Memory 时,当 warp 的组织形式为 8x4 或 16x2 时,则会出现 Bank Conflict,导致 Shared memory 读取时的 reply,从而影响性能。
4、Register 优化矩阵乘法
前面的算法设计中,每个线程只计算了矩阵 C 中的一个元素,每个线程每个内层循环需要从子矩阵 A 和子矩阵 B 中各读取一个 4 Byte 的元素(共取 8 Byte 数据执行2次浮点运算),实际上可以让每个线程读取一组 Shared Memory 数据后(放入寄存器中),计算更多的元素,从而减少 Shared Memory 的访问。
// using ILP 2 to improve the performance
__global__ void matrixMulSharedILPkernel(float* A, float* B, float* C, int width){
int row = blockIdx.y * blockDim.y * 2 + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
float val[2] = {0.0f};
__shared__ float shTileA[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float shTileB[BLOCK_SIZE][BLOCK_SIZE];
int iter = (width + BLOCK_SIZE - 1) / BLOCK_SIZE;
for(int i = 0; i < iter; i++){
// read data from global memory to shared memory
shTileA[threadIdx.y][threadIdx.x]=A[row * width+i*BLOCK_SIZE+threadIdx.x];
shTileA[threadIdx.y+16][threadIdx.x]=A[(row+16)*width+i*BLOCK_SIZE+threadIdx.x];
shTileB[threadIdx.y][threadIdx.x]=B[(i*BLOCK_SIZE+threadIdx.y)*width+col];
shTileB[threadIdx.y+16][threadIdx.x]=B[(i*BLOCK_SIZE+threadIdx.y+16)*width+col];
__syncthreads();
for(int j = 0; j < BLOCK_SIZE; j++){
val[0] += shTileA[threadIdx.y][j] * shTileB[j][threadIdx.x];
val[1] += shTileA[threadIdx.y + 16][j] * shTileB[j][threadIdx.x];
}
__syncthreads();
}
C[row * width + col] = val[0];
C[(row + 16) * width + col] = val[1];
}
注意, kernel launch 时的 blocksize 需要变化为:blockSize.y = BLOCK_SIZE / 2。而 gridSize 不变。
上面的 kernel 函数中,注意观察内层循环:让 1 个 thread 分别从子矩阵 A 中读取 2 个数据,从子矩阵 B 中读取 1 个数据(注意2次取数据是同一地址!),然后同时计算2个元素 val[0] 和 val[1]。此时,通过读取 4B*3 个数据,实现了2次乘加共4次计算。减少了 shared memory 中子矩阵B一半的数据访问。
下面详细分析一下上述代码对 Shared Memory 的访问情况:
Shared Memory Store:每 1 次外层循环中对矩阵 A 和矩阵 B 有 2 次 load,总的 thread 个数减少了一半。但是实际上总的 load transactions 次数没有变化(假设 no bank conflict)。
Shared Memory Load:在每 1 次内层循环中,1 个 warp 内的 32 个 thread 需要从 shTileA 读取同 2 个元素,需要 2 次 Shared Memory Load Transactions,再从 shTileB 中读取连续的 32 个元素(假设没有 Bank Conflict,需要1次 Shared Memory Load Transactions)(注意val[0]和val[1]的计算中,shTileB 的地址是一样的),即总共需要 3 次 Shared Memory Load Transactions。 次循环总共需要 次 Shared Memory Load Transactions。对于 个 threads,共有个 warp,总共的 Shared Memory Load Transactions 数目为:。对比优化前的 Shared Memory Load Transactions 数目 。
当然,我们还可以继续对 kernel 函数进行优化,让每个 thread 计算的元素个数从 2 个提高到 4/8/16/32 个,对比测试结果如下(m=n=k=1024, BLOCK_SIZE=32*32):
| 每个thread计算元素个数 | 计算性能 |
|---|---|
| 1 | 3.670 T-FLOPS |
| 2 | 4.800 T-FLOPS |
| 4 | 6.019 T-FLOPS |
| 8 | 6.772 T-FLOPS |
| 16 | 6.665 T-FLOPS |
| 32 | 5.323 T-FLOPS |
此时测出的峰值性能相比于优化前提升了约 82.5%。但是,为什么继续增大每个 thread 计算元素个数后,性能反而下降呢?
一方面是继续增大该指标后,每个 block 中 thread 的个数是在减少的,但是每个 block 中需要的 Shared Memory 数量没有减少。这将导致由于 Block 总数受限,降低 SM 中的 active threads 数量,即降低了 Occupancy。另外,每个 thread 计算更多元素会使用更多的 Registers。而每个 thread 中 Registers 的个数又会反过来影响 SM 中 active threads 的个数,进而影响 Occupancy。
具体 Shared Memory 或者 Registers 哪个会影响 Occupancy,取决于哪个指标先到达阈值。在没有换来同等指令集并行的情况下,Occupancy 的减少会导致计算性能受限。

注:Shared_2代码中,每个thread计算 8 个元素。
上图为优化前后 3 个版本CUDA程序的性能差异,从图中可以得出:
在句子规模为 的情况下,第三个版本的方法达到的峰值性能超过 7T;
随着矩阵规模的增加,计算性能也逐渐增加;
通过利用 Shared Memory 和寄存器能有效的降低 IO 带宽对性能的影响,从而更加高效的利用 GPU 的硬件计算资源。
完整代码如下:
#include
#define BLOCK_SIZE 5
//基础版本
__global__ void matMul_GlobalKernel(int *A,int *B,int *C,int width){
int bx = blockIdx.x;
int by = blockIdx.y;
int tx = threadIdx.x;
int ty = threadIdx.y;
int Col = bx * blockDim.x + tx;
int Row = by * blockDim.y + ty;
int perValue = 0;
for(int i = 0; i < width; i++){
perValue += A[Row * width + i] * B[i * width + Col];
}
C[Row * width + Col] = Pervalue;
}
//优化1
__global__ void matmul_ShareMemory(int *M,int *N,int *P,int width){
__shared__ float Mds[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float Nds[BLOCK_SIZE][BLOCK_SIZE];
int bx = blockIdx.x;
int by = blockIdx.y;
int tx = threadIdx.x;
int ty = threadIdx.y;
int Col = bx * BLOCK_SIZE + tx;
int Row = by * BLOCK_SIZE + ty;
int Pervalue = 0;
//有多少个BLOCK_SIZE,每个循环计算一个块的大小
for(int i = 0;i < width / BLOCK_SIZE;i++){
Mds[ty][tx] = M[Row * width + (i * BLOCK_SIZE + tx)];
Nds[ty][tx] = N[Col + (i * BLOCK_SIZE + ty) * width];
__syncthreads();
//BLOCK_SIZE相乘
for(int k = 0;k < BLOCK_SIZE;k++)
Pervalue += Mds[ty][k] * Nds[k][tx];
__syncthreads();
}
P[Row * width + Col] = Pervalue;
}
//优化2
__global__ void matrixMul_SharedILPkernel(float* A, float* B, float* C, int width){
int row = blockIdx.y * blockDim.y * 2 + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
float val[2] = {0.0f};
__shared__ float shTileA[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float shTileB[BLOCK_SIZE][BLOCK_SIZE];
int iter = (width + BLOCK_SIZE - 1) / BLOCK_SIZE;
for(int i = 0; i < iter; i++){
// read data from global memory to shared memory
shTileA[threadIdx.y][threadIdx.x]=A[row * width+i*BLOCK_SIZE+threadIdx.x];
shTileA[threadIdx.y+16][threadIdx.x]=A[(row+16)*width+i*BLOCK_SIZE+threadIdx.x];
shTileB[threadIdx.y][threadIdx.x]=B[(i*BLOCK_SIZE+threadIdx.y)*width+col];
shTileB[threadIdx.y+16][threadIdx.x]=B[(i*BLOCK_SIZE+threadIdx.y+16)*width+col];
__syncthreads();
for(int j = 0; j < BLOCK_SIZE; j++){
val[0] += shTileA[threadIdx.y][j] * shTileB[j][threadIdx.x];
val[1] += shTileA[threadIdx.y + 16][j] * shTileB[j][threadIdx.x];
}
__syncthreads();
}
C[row * width + col] = val[0];
C[(row + 16) * width + col] = val[1];
}
完整代码见【集智书童】知识星球
星球主要内容包括:经典论文分享、可落地方法复现、模型部署、Transformer部署与改进、电子资源分享等内容。
以下是星球的部分内容,持续更新中......



扫描下方二维码,我们一起学习吧!!!
参考
[1]. 矩阵乘法的 CUDA 实现、优化及性能分析
2推荐阅读
AI部署篇 | CUDA学习笔记1:向量相加与GPU优化(附CUDA C代码)
长按扫描下方二维码添加小助手。
可以一起讨论遇到的问题
声明:转载请说明出处
扫描下方二维码关注【集智书童】公众号,获取更多实践项目源码和论文解读,非常期待你我的相遇,让我们以梦为马,砥砺前行!
