
如何看待李沐老师提出的「用随机梯度下降来优化人生」?

来源:知乎
电光幻影炼金术(上海交大计算机第一名)回答:
看完李沐老师的文章,深受启发。本人阅读大量文献,提出了下面“反向利用随机梯度下降优化人生“的方案。下文与李沐老师的文章的原文(在引用块里)一一对应进行回答。
李沐:目标要大。不管是人生目标还是目标函数,你最好不要知道最后可以走到哪里。如果你知道,那么你的目标就太简单了,可能是个凸函数。你可以在一开始的时候给自己一些小目标,例如期末考个80分,训练一个线性模型。但接下来得有更大的目标,财富自由也好,100亿参数的变形金刚也好,得足够一颗赛艇。
反向:目标要小而具体。如果目标过大,很容易导致因为噪声过大,奖励过于稀疏而发散[1]。收敛情况很好的,往往是图片分类这种目标非常明确而具体的任务。与之相反,在真实机器人面临的搜索空间很大的场景,随机梯度下降很容易发散[2]。
李沐:坚持走。不管你的目标多复杂,随机梯度下降都是最简单的。每一次你找一个大概还行的方向(梯度),然后迈一步(下降)。两个核心要素是方向和步子的长短。但最重要的是你得一直走下去,能多走几步就多走几步。
反向:该放弃时就要放弃。一个简单也很有效的解决梯度策略发散的技巧就是抛弃过大的梯度[3]。如果遇到很大的梯度还不选择抛弃或者裁剪,很容易会导致发散的结果。除此之外,很多场合使用随机梯度下降训练几个epoch会发现梯度越来越大,这时候一定要及时停下来检查数据。不然一晚上过后只能得到一个NAN(发散)的结果,白白浪费宝贵的算力资源。
李沐:痛苦的卷。每一步里你都在试图改变你自己或者你的模型参数。改变带来痛苦。但没有改变就没有进步。你过得很痛苦不代表在朝着目标走,因为你可能走反了。但过得很舒服那一定在原地踏步。需要时刻跟自己作对。
反向:拒绝内卷。优化有两种模式,一种很陡峭曲折的(比较艰难,对应内卷),一种是比较平滑的(比较轻松,对应佛系和不卷)。这里我引用一篇顶会论文中[4]的可视化结果,

上图左边的(a)优化曲面不平滑,对应很内卷的残酷场景;右边的(b)是很平滑的过程,对应不内卷的自由发展。那么究竟是(a)好呢,还是(b)好呢?想必大家已经猜到了,(b)这种优化模式要远远好于(a),错误率小两倍多(错误率:(b)5.89%,(a)13.31%)。因此,大家一定要学会拒绝内卷,保护自己平滑的成长过程。
李沐: 四处看看。每一步走的方向是你对世界的认识。如果你探索的世界不怎么变化,那么要么你的目标太简单,要么你困在你的舒适区了。随机梯度下降的第一个词是随机,就是你需要四处走走,看过很多地方,做些错误的决定,这样你可以在前期迈过一些不是很好的舒适区。
反向:别走太远。正则化是深度学习乃至机器学习中非常常见的技巧,要想取得好的收敛效果,往往需要加以约束,不能走得太远[3]。放任自我也会容易导致发散。
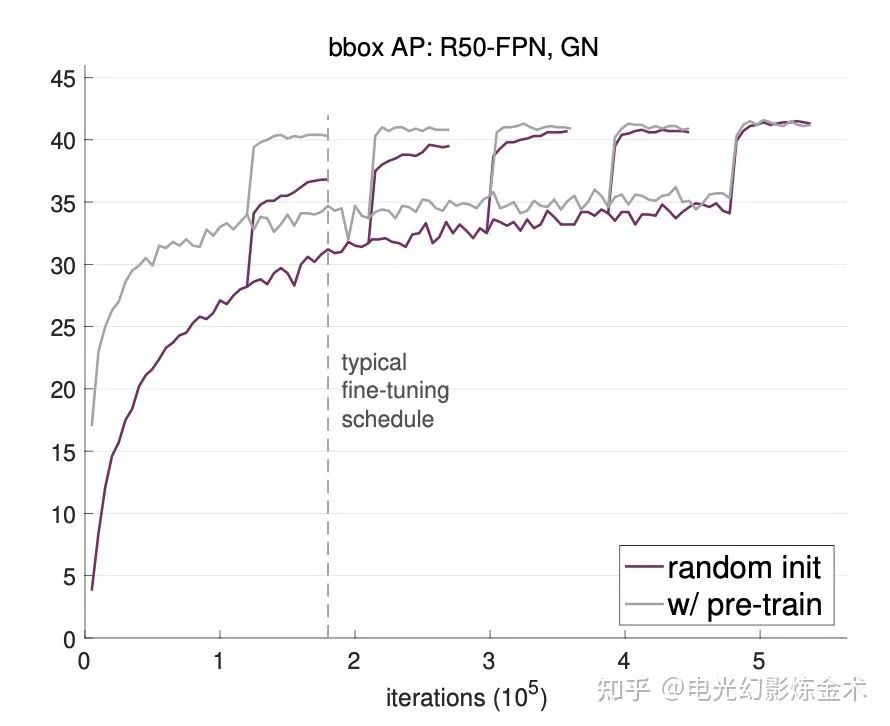
李沐: 赢在起点。起点当然重要。如果你在终点附近起步,可以少走很多路。而且终点附近的路都比较平,走着舒服。当你发现别人不如你的时候,看看自己站在哪里。可能你就是运气很好,赢在了起跑线。如果你跟别人在同一起跑线,不见得你能做更好。
反向:起点不重要。Facebook公司Kaiming大神的一篇论文[5]用大量实验事实证明,接受预训练的模型,虽然一开始会好一些,但是后面跟随机初始化的模型相差无几。有实验结果图为证:
李沐: 很远也能到达。如果你是在随机起点,那么做好准备前面的路会非常不平坦。越远离终点,越人迹罕见。四处都是悬崖。但随机梯度下降告诉我们,不管起点在哪里,最后得到的解都差不多。当然这个前提是你得一直按照梯度的方向走下去。如果中间梯度炸掉了,那么你随机一个起点,调整步子节奏,重新来。
反向:太远就到不了了。如果间隔时间太长,奖励函数的折损会非常严重,导致强化学习的成功率不高。这也是强化学习目前只能在模拟器中成功(无法在真实的机器人上被广泛应用)的主要原因之一。
李沐:简单最好。当然有比随机梯度下降更复杂的算法。他们想每一步看想更远更准,想步子迈最大。但如果你的目标很复杂,简单的随机梯度下降反而效果最好。深度学习里大家都用它。关注当前,每次抬头瞄一眼世界,快速做个决定,然后迈一小步。小步快跑。只要你有目标,不要停,就能到达。
反向:越结构化的模型越好。文献显示[6],拓扑结构较复杂的模型,在同样的梯度下降算法之后会产生更小的泛化误差。而过于简单的模型,往往会容易收敛到平凡解,丧失足够的泛化能力。

不是很懂优化这块,欢迎批评指点。
有些点没讲到,是因为找不到特别好的文献,或者读起来没那么有趣。
如果要我说,人生反正不是监督学习,更像是强化学习甚至无监督学习。
当然,也可能人生就是随机挑战。
Towser回答:
然而,除了优化算法还有初始化:有些人有预训练模型,一出生就在最优点附近,随便走两步就比大多数人吭哧吭哧走半天效果还好;有些人出生在悬崖边上,一步走错就万劫不复。
然而,除了优化算法还有损失函数:有些人的损失函数是强凸的,优化的方向非常明确,或者是有很强的正则项,走错的时候可以把他往回拉;有些人的损失函数数值极其不稳定,动不动就爆 NaN/Inf。
就算是优化算法,也要看你能拿到什么信息:有些人是一阶优化,跟着梯度信息慢慢往前走;有些人是零阶优化,拿不到梯度信息,就只能自己摸黑瞎走走。
参考
^Hare, Joshua. "Dealing with sparse rewards in reinforcement learning." arXiv preprint arXiv:1910.09281 (2019).
^Peters, Jan, and Stefan Schaal. "Policy gradient methods for robotics." 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2006.
^abSchulman, John, et al. "Proximal policy optimization algorithms." arXiv preprint arXiv:1707.06347 (2017).
^Li, Hao, et al. "Visualizing the loss landscape of neural nets." arXiv preprint arXiv:1712.09913 (2017).
^He, Kaiming, Ross Girshick, and Piotr Dollár. "Rethinking imagenet pre-training." Proceedings of the IEEE/CVF International Conference on Computer Vision. 2019.
^Corneanu, Ciprian A., Sergio Escalera, and Aleix M. Martinez. "Computing the testing error without a testing set." Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020.
——The End——
为了方便大家学习,我们建立微信交流群,欢迎大家加我的微信,邀你进群!
微商无关人员勿扰!
