
(附代码)用OpenCV实现条形码识别
点击左上方蓝字关注我们
作者:梁峻豪,王天麒,孙中夏 (南方科技大学计算机科学与工程系)
最近,我们为OpenCV贡献了一维条形码识别模块,代码收录在:
https://github.com/opencv/opencv_contrib/tree/master/modules/barcode。
我们收集的数据集(数据集地址:https://github.com/SUSTech-OpenCV/BarcodeTestDataset,共250张条码图片)上进行了测试,我们的识别算法正确率达到了96%,速度为20ms每张图像。作为对比,我们也测试了ZXing在该数据集上的表现,其正确率为64.4%,速度为90ms每张图像。
注:测试速度不包含初始化以及读图时间。同时,我们的算法是C++实现,ZXing是Java实现。另外,对于用图片数据集进行的测试,ZXing99%的时间是在做彩色图到灰度图的转换。
本文将对此模块的原理和使用方式进行介绍。
条形码介绍
条形码是将宽度不等的多个黑条和空白,按照一定的编码规则排列,用以表达一组信息的图形标识符,如下图所示:
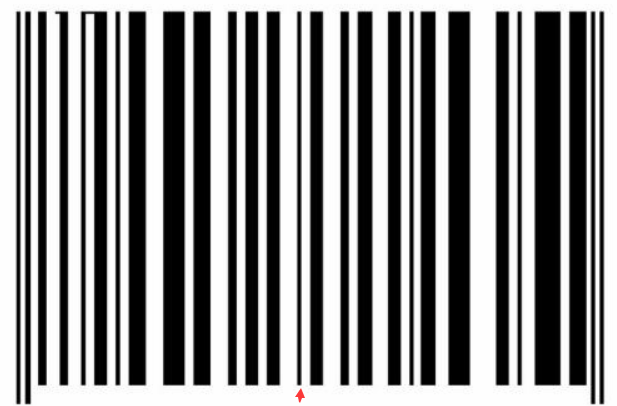
条码区域与其他图像相比有如下两个重要特点:第一,条码区域内的条空是平行排列的,方向趋于一致;第二,为 了条码的可识读性,条码在制作时条和空之间有着较大的反射率差,从而条码区域内的灰度对比度较大,而且边缘信息丰富。
基于方向一致性的条码定位算法
根据条形码方向趋于一致的特点,我们可以将图像分块,通过计算每个块内梯度方向的一致性,来滤除那些低一致性的块。下图是筛选过后剩下的块:

由于包含条码区域的块一定连续存在的特性,我们可以通过对这些图像块再进行一个改进的腐蚀操作过滤掉部分背景图像块。下图是滤除部分背景图像块后剩余的块:

得到这些块之后,我们再根据每个图像块内的平均梯度方向进行连通。因为如果是相邻的图像块都属于同一个条码的话,那么他们的平均梯度方向也一定相同。
得到连通区域之后我们再根据条码图像的特性进行筛选,比如连通区域内的梯度大于阈值的点的比例,组成连通区域的图像块数量等。
最后,用最小外接矩形去拟合每个连通区域,并计算外界矩形的方向是否和连通区域内的平均梯度方向一致,过滤掉差距较大的连通区域。将平均梯度方向作为矩形的方向,并将矩形作为最终的定位框。
条形码解码
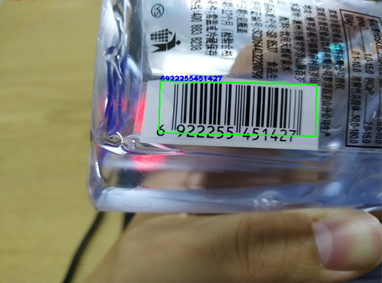
目前我们支持了三种类型的条码解码,它们分别是EAN13、 EAN8 和UPC-A。(下图为EAN13 条码示例)
条码的识别主要流程如下图:
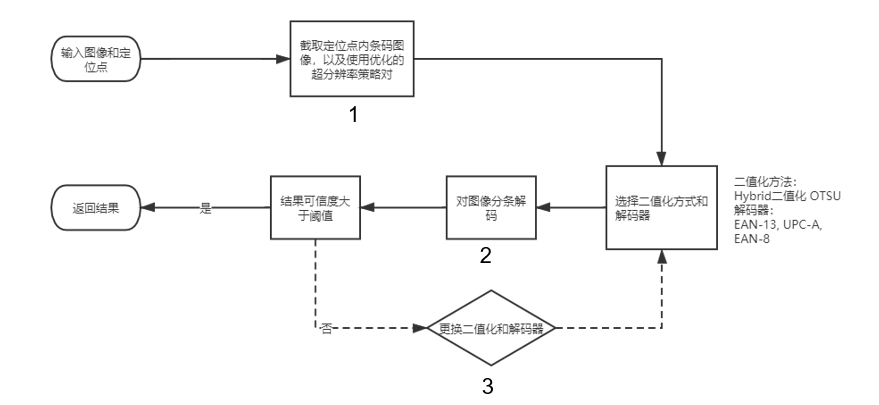
其中:
优化的超分辨率策略指的是对较小的条码进行超分辨率放大,不同大小条码做不同处理。
解码算法的核心是基于条码编码方式的向量距离计算。因为条码的编码格式为固定的数个"条空",所以可以在约定好"条空"间隔之后。将固定的条空读取为一个向量,接下来与约定好的编码格式向匹配,取匹配程度最高的编码为结果。
在解码步骤中,解码的单位为一条线,由于噪点,条空的粘连等原因,单独条码的解码结果存在较大的不确定性,因此我们加入了对多条线的扫码,通过对均匀分布的扫描与解码,能够将二值化过程中的一些不完美之处加以抹除。
具体实现为:首先在检测线上寻找起始符,寻找到起始符之后,对前半部分进行读取与解码,接着寻找中间分割符,接着对后半部分进行读取与解码,最后寻找终结符,并对整个条码进行首位生成与校验(此处以EAN13格式举例,不同格式不尽相同)。最后,每条线都会存在一个解码结果,所以对其进行投票,只将最高且总比例在有效结果50%以上的结果返回。这一部分我们基于ZXing的算法实现做了一些改进(投票等)。
更换二值化和解码器指的是在为解码成功遍历使用每种解码器和二值化尝试解码。
使用方式
C++
#include "opencv2/barcode.hpp"
#include "opencv2/imgproc.hpp"
using namespace cv;
Ptr<barcode::BarcodeDetector> bardet = makePtr<barcode::BarcodeDetector>("sr.prototxt", "sr.caffemodel"); //如果不使用超分辨率则可以不指定模型路径
Mat input = imread("your file path");
Mat corners; //返回的检测框的四个角点坐标,如果检测到N个条码,那么维度应该是[N][4][2]
std::vector<std::string> decoded_info; //返回的解码结果,如果解码失败,则为空string
std::vector<barcode::BarcodeType> decoded_format; //返回的条码类型,如果解码失败,则为BarcodeType::NONE
bool ok = bardet->detectAndDecode(input, decoded_info, decoded_format, corners);
Python
import cv2
bardet = cv2.barcode_BarcodeDetector()
img = cv2.imread("your file path")
ok, decoded_info, decoded_type, corners = bardet.detectAndDecode(img)
更多使用方式请参考文档:
https://docs.opencv.org/master/dc/df7/classcv_1_1barcode_1_1BarcodeDetector.html
参考文献
王祥敏,汪国有. 一种基于方向一致性的条码定位算法[EB/OL]. 北京:中国科技论文在线 [2015-04-22]. http://www.paper.edu.cn/releasepaper/content/201504-338.
END
点赞三连,支持一下吧↓