
意大利理工学院新型三足机器人问世,太空中“搬砖”也可以很灵活
你心目中的太空机器人长啥样?
老科幻迷们可能会想起 1972 年电影《宇宙静悄悄》中的双足机器人,它们的日常工作中就是在宇宙飞船的外部进行维护。作为科幻界的代表元素,机器人与太空,似乎有着天然的相配感。
拥有钢筋铁骨、灵活大脑、强劲身手的机器人,相比于人类来说无疑更能适应太空的环境和作业。

为了给宇航员在太空作业时提供更有效的支持,近日,意大利理工学院的研究人员实现了一个用于空间应用的新型机器人平台原型。
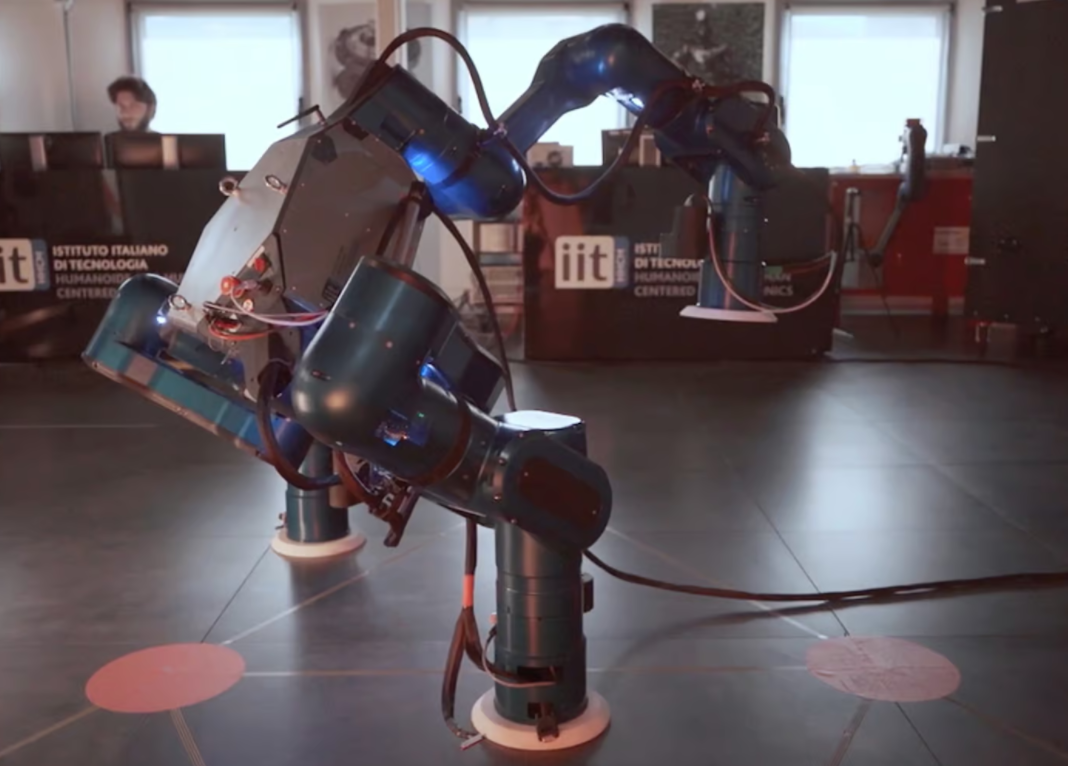
这个机器人被命名为 MARM(多臂可移动机械手),具有三个肢体,可用于行走、移动、抓取和运输有效载荷模块,同时在微重力环境下可在空间基础设施上自行重新定位。这款机器人旨在帮助宇航员在太空中或未来在其他星球上组装和维护基础设施。
据悉,该平台由IIT与Leonardo S.p.A和GMV合作设计和制造,并由欧洲航天局(ESA)提供资助。
空间探索领域的机器人应用为新平台的开发提供了独特的环境、条件和机会。事实上,虽然地球上机器人控制、运动和操纵所需的技术相当先进,但微重力等轨道环境条件对机器人研究提出了新的挑战。
为了解决宇航员安装、检查、维护和修理空间基础设施的难题,IIT 的研究人员研发的MARM能够抓取、运输和组装模块,同时在空间基础设施上移动。
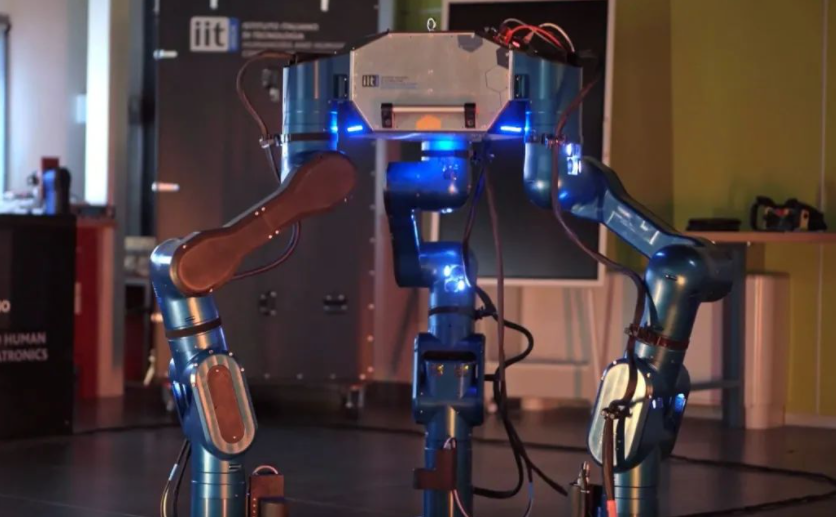
MARM 机器人由一个六边形的中央骨盆基座、三条机械腿和一个用于供电和发送/接收数据的对接设备组成。
也许你会疑问,比起现有的多采用四至六条腿结构的陆地可移动机器人,这些机器人的步态更稳定,为什么MARM却只有三条机械腿?
其实,额外的腿不但会增加重量,反倒会增加将MARM送入太空的制造与维护成本。

研发团队考虑到MARM本身在低重力环境下工作,因此三条腿足以让它进行移动和其他功能操作。虽然这个造型虽然看着有些奇怪,但它可是严格按照计算设计方法构建而成。
团队在研究过不同的运动学模型后,得出了关于MARM的肢体、连接结构、关节的长度及构造的最佳数值,并且研究人员们在有重力和无重力的情况下,对运动学和运输/操作能力都进行过基础测试,充分的考虑并优化了机器人的移动性和灵活性能。
MARM 通过它的三条腿四处移动,只要给它配备适当的工具,它就有足够的灵活性自行进行维修作业,而宇航员可以安全地留在空间站或航天器内。
在微重力的空间站或太空船外部工作时,它会用两条腿抓住上面的标准连接点,便于自己在上面爬行,再用另一条腿携带各种有效载荷。
它还可以组装和定位组件(特别是模块化六边形瓷砖,宽 1.2 米,厚 0.2 米,重约12 公斤)并操纵所轨道置换装置(ORU)。
与之前开发的太空机器人相比,MARM在技术上采用了三条器械腿与中央骨盆基座相连,可能是最主要的区别。
拥有三条腿的MARM 每条机械腿都具备六个自由度,被赋予了更大的运动和操纵灵活性,同时也让机器人具有了更广泛的操纵范围。
此外,由于三肢的设计,机器人能够在就位后进行全身运动,用于锚固的肢体可以通过调整MARM中央骨盆底座方便组装操作,减少传递到站架的力。这是拥有多个肢体而不是使用同一个肢体进行爬行和组装的主要优势之一。
相比其他的太空机器人,MARM的更大优势是不受重力影响,即使在相对高重力的环境下也能良好运行,这意味着将来它可能在各类大小型行星上工作。根据研发团队设想的场景,MARM 平台将能够通过其机电和控制组件,以及感知系统和输入/输出的持续交换,从仓库拾取有效载荷,在携带它的同时重新定位,并且将其组装在所需位置。
从目前的设计来看,无论是航天器维修、还是设备的安装与维护,MARM机器人已经能够代替人类完成许多工作。接下来,MARM机器人平台原型将会在物理模拟器中进行评估测试,以便在开发符合太空条件的正式版本之前确定这种机器人方案的可行性。
如此看来,阿西莫夫科幻小说中「机器人+太空旅行」的组合,正在逐步成为现实。
>>>
充满激情的新时代,
充满挑战的新疆域,
与踔厉奋发的引领者,
卓尔不群的企业家,
一起开拓,
一起体验,
一起感悟,
共同打造更真品质,
共同实现更高价值,
共同见证商业航天更大的跨越!
——《卫星与网络》,观察,记录,传播,引领。
>>>
· 《卫星与网络》特别顾问:王兆耀
· 《卫星与网络》编辑委员会
主任:陈玉忠
高级顾问:王国玉、刘程、童旭东、相振华、王志义、杨烈
编辑委员:曹志刚、陈嵩辉、邓中亮、荆继武、景贵飞、郎燕、刘进军、刘天雄、宁振波、秦智、汪春霆、吴季、徐小舒、阎丽娟、赵敏、肇启明、周建华、朱铎先
· 《卫星与网络》创始人:刘雨菲
· 《卫星与网络》副社长:袁鸿翼