
智驾工程师随笔-通信、软硬件
(第408期)

文丨船尾
汽车主机厂ADAS研发人员
整理一些ADAS工作中常用通信、软硬件开发领域的知识点,供查阅。
-
汇编。汇编大多是指汇编语言,汇编程序。把汇编语言翻译成机器语言的过程称为汇编。在汇编语言中,用助记符(Memoni)代替操作码,用地址符号(Symbol)或标号(Label)代替地址码。这样用符号代替机器语言的二进制码,就把机器语言变成了汇编语言。于是汇编语言亦称为符号语言。用汇编语言编写的程序,机器不能直接识别,要由一种程序将汇编语言翻译成机器语言,这种起翻译作用的程序叫汇编程序,汇编程序是系统软件中语言处理的系统软件。
-
端口。分为硬件、网络、软件端口(了解少,暂不展开)
硬件端口: CPU通过接口寄存器或特定电路与外设进行数据传送,这些寄存器或特定电路称之为端口。
其中硬件领域的端口又称接口,如:并行端口、串行端口等。
网络端口: 在网络技术中,端口(Port)有好几种意思。集线器、交换机、路由器的端口指的是连接其他网络设备的接口,如RJ-45端口、Serial端口等。我们 这里所指的端口不是指物理意义上的端口,而是特指TCP/IP协议中的端口,是逻辑意义上的端口。
软件端口:缓冲区。
-
看门狗。
看门狗,又叫 watchdog。此狗非彼狗。
从本质上来说看门狗就是一个定时器电路,一般有一个输入和一个输出,其中输入叫做喂狗,输出一般连接到另外一个部分的复位端,一般是连接到单片机。看门狗的功能是定期的查看芯片内部的情况,一旦发生错误就向芯片发出重启信号。看门狗命令在程序的中断中拥有最高的优先级。
看门狗的功能原理主要涉及两个方面:监控器和定时器。监控器:监控器是看门狗的核心部分,其主要功能是监测系统的运行状态,包括 CPU 使用率、内存使用情况、硬盘空间、网络连接等。如果监控器发现系统出现异常或故障,就会触发看门狗的保护机制,采取相应措施,如自动重启系统或向管理员发送警报信息。定时器:定时器是看门狗的另一个重要组成部分,它会在系统启动时开始计时,当计时器超时时,就会触发看门狗的保护机制。超时时间一般是由系统管理员或开发人员根据实际需要设置的,通常为几秒钟到几分钟不等。
-
IO(输入输出)。
I是input,输入;O是out, 输出。输入就像是接受端。你给我电,单片机就会知道,输入端是1,你不给我电,输入端是0。输出是,设定这个脚为输出,读取这个脚的状态值的话,1为高电压,0为低电平。输出一般是驱动一个小东西,再带动一个大装置来达到自己想要的要求。你可以看做一个电源。能给你的东西供电。就像电源不会随你会接的东西影响,它始终都是电源。只是有状态,有电、没电。
-
Autisar.汽车开放系统架构。
Autisar内部可以分为三大模块:应用层(Application)、中间层(RTE),底层(BSW)。
App:可以理解为某一功能的输出,举个例子:智驾功能通过一系列逻辑想要请求车辆打开转向灯(接下来会变道),那么应用层就是把这个点转向灯的请求发出去。
RTE:很有逻辑技巧的一层,可以理解成底层与应用层的匹配、连接层,为了各项命令更更高效的分配!可以理解成整车GW网关。
BSW:提供了一些基础软件模块,包括通信协议、诊断协议、内存管理、定时器等,以支持运行时环境层和应用层的功能实现。基础软件层的主要任务是提供可重用性和互操作性。

-
串行/并行。
这里可以理解为数据传输的两种类型。一种是字节依次传输,one by one,一种是可以多个字节进行打包后再传输。前者即为串行传输,后者为并行传输,很明显后者传输速率更快。
-
CAN总线传输仲裁逻辑。
数据在CAN上传输时,是以高低电平进行仲裁的,仲裁结果优先则先传输。即报文的优先级,是通过对 ID 的仲裁来确定的。CAN总线上有两种电平状态,如果总线上同时出现显性电平和隐性电平,总线的状态会被置为显性电平,CAN正是利用这个特性进行仲裁。且是以低电平为优先。
下面找了份示意图,供各位参考。
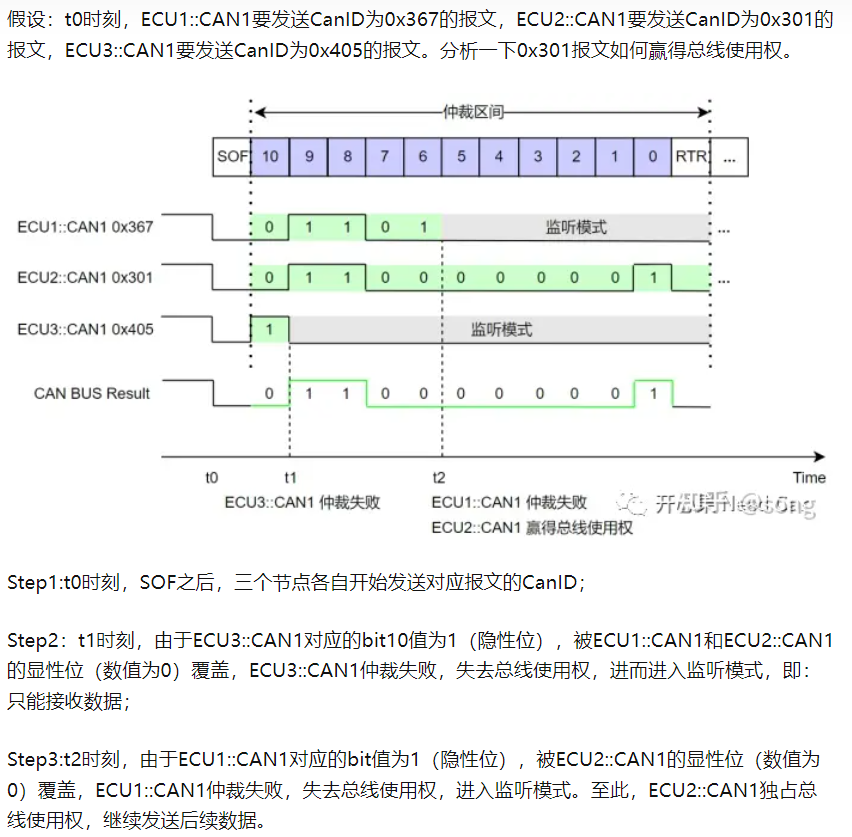
核心思想:前面的0越多,优先级越高。

关注《无人驾驶俱乐部》,让你更懂汽车无人驾驶技术!
END
往期精彩推荐
-
车路协同: 物联网V2X技术—智能驾驶的又一次伟大变革!
后台回复关键字:
✔回复 “ V2X ” :查看V2X两大技术标准:DSRC与LTE V2X详细对比资料;
✔回复 “精美壁纸 ” :获取兰博基尼·汽车精美壁纸一套;
还有更多汽车无人驾驶领域资料、资源等,敬请期待!
欢迎加入《无人驾驶俱乐部》! 2023: 共同学习、共同进步、共同发展。 智能驾驶ADAS,V2X, 感知融合!