
指纹特征提取及描述(附Python代码)

一、设计思路
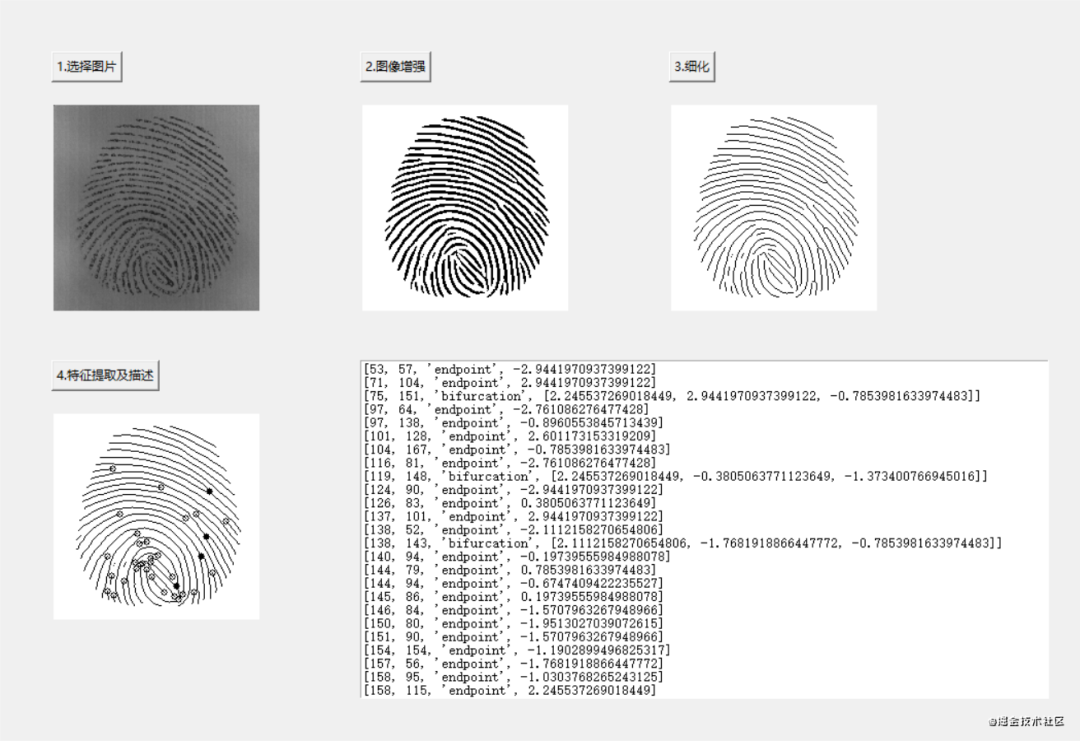
项目的编程环境为python3.7.7,编译器使用pycharm2019.3.4 x64。首先为项目设计一个GUI界面,界面有四个按钮,分别是“选择图片”、“图像增强”、“细化”和“特征提取及描述”,使用是按顺序点击按钮即可,每完成一步,都会在按钮下方显示处理结果,最终的特征描述会在右下的文本框中显示。
二、图像增强
图像归一化
由于不同的指纹图像在灰度图分布上有很大的差异,会给之后的图像特征提取和匹配增加难度,因此指纹图像要进行归一化处理,将所有图像转换成具有给定均值和方差的标准图像。归一化并不能改变指纹的脊线和谷线的清晰程度,其结果是减少了不同指纹图像之间灰度值的差异,并为接下来的图像处理做好准备。归一化公式如下:
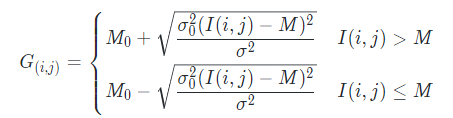
式中和分别为规格化前后的图像,、是预先设定的图像平均灰度和均方差,和为原图像的灰度均值和方差。
方向场估算
方向场反映了指纹图像上纹线的方向,其准确性直接影响图像增强的效果。根据纹线方向在局部区域内基本一致的特点,先把指纹图像分块,然后计算每一个子块的纹线方向,最后用该方向代表对应子块内各个像素的方向。用这种方法来求指纹方向场效率较高且不易受少量的图像噪声影响,具体算法如下:
把归一化图像分成的像素块,然后利用Sobel算子计算块中每个像素点水平方向上的梯度值和垂直方向上的梯度值。
计算中心点为的边长为w的子块的脊线方向角,公式如下:
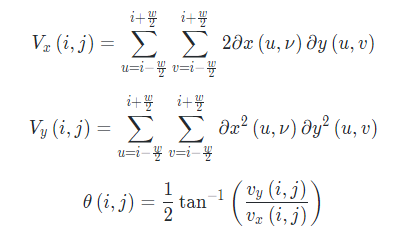

指纹图像的方向场
频率场估算
在指纹图像的局部非奇异区域里,沿着垂直于脊线的方向看,指纹脊线和谷线像素点灰度值大致形成一个二维的正弦波,定义纹线频率为相邻的两个波峰或波谷之间的像素点数的倒数。求取这些互不重叠的局部区域的频率值,按各区域位置组成一个场结构,称为指纹的频率场。设表示规格化后的图像,是指纹方向场,算法如下:
在所得方向场的基础上,沿其垂直方向投影每一块所有像素的灰度值,该投影形成一维正弦波,其极值点对应指纹的脊线和谷线。假定作为上述一维正弦波两相邻峰值之间的平均像素数,则频率。
gabor滤波
一旦指纹图像的方向场和频率场确定,这些参数可以用来构造偶对称Gabor滤波器。Gabor滤波器是具有方向选择特性和频率选择特性的带通滤波器,并且能够达到时域和频域的最佳结合。偶对称的Gabor滤波器在空间域中具有下面的形式:
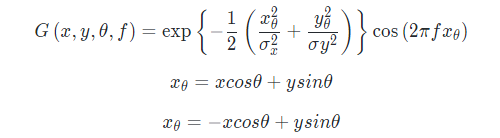
式中,是滤波器的方向,是脊线的频率,表示坐标轴逆时针旋转角度,,和,分别是沿着x和y轴的高斯包络常量。
 原图和图像增强后的效果图
原图和图像增强后的效果图
三、骨架提取
图像骨架提取,实际上就是提取目标在图像上的中心像素轮廓,以目标中心为准,对目标进行细化。一般细化后的目标都是单层像素宽度。细化是从原来的图中去掉一些点,但仍要保持原来的形状。实际上是保持原图的骨架。判断一个点P是否能去掉是以8个相邻点的情况来作为判据的,具体判据为:
内部点不能删除
孤立点不能删除
端点不能删除
如果P是边界点,去掉P后,如果连通分量不增加,则P可删除
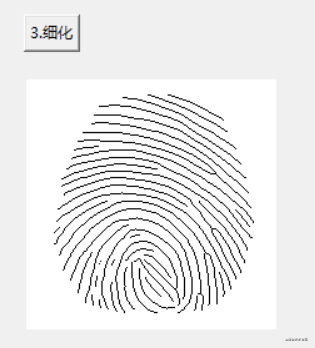
骨架提取
四、指纹特征提取和表示
本次项目选取的特征是指纹图像的端点和分叉点,特征描述为特征点所处的位置和脊线在特征点处的切线斜率,其中,位置为特征点在图像中的横坐标和纵坐标,端点的切线斜率有1个,分叉点的切线斜率有3个。
端点
若骨架提取后的二值图像的点为黑色像素,且其八领域有且只有一个黑色像素,其余7个为白色像素,则点为端点,端点特征的提取和表示算法如下:
按上述定义遍历骨架提取后的二值图像的像素点,寻找所有符合定义的端点;
剔除指纹图像边缘的端点,因为采集的指纹存在边缘,边缘的端点不能视为指纹的端点,需要予以剔除。方法是看步骤1得到的端点所在的行和列的某一侧是否全为白色像素,是的话判断为边缘,予以剔除,否则判断为内部端点,予以保留;
沿着端点所在的脊线,寻找距离端点间隔4个像素点的点,若5步之内脊线断裂或遇到分叉点,则将该端点剔除,该步骤用于剔除孤立点,并为计算端点的切线斜率做准备;
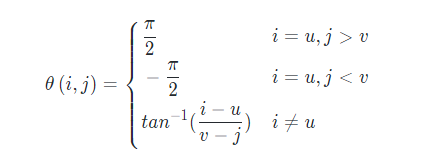
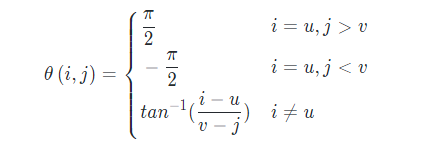
由步骤3得到的端点和间隔4个像素点的点,计算脊线的切线斜率,公式如下:
分叉点
若骨架提取后的二值图像的点为黑色像素,且其八领域有3个黑色像素,其余5个为白色像素,则点为端点,端点特征的提取和表示算法如下:
按上述定义遍历骨架提取后的二值图像的像素点,寻找所有符合定义的分叉点;
按照步骤1有些分叉点在像素级别上能得到2个相互贴近的点,需要剔除其中一个。如我们得到下图2个分叉点,在宏观上其实是同一个。项目中剔除原则是邻域黑像素相互贴近的分叉点,所以下图剔除掉第一个,保留第二个;
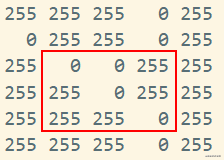
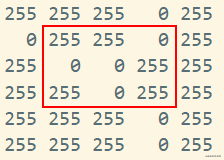
像素级别上相互贴近的两个分叉点
沿着端点所在的3条脊线,分别寻找距离端点间隔4个像素点的3个点,若5步之内脊线断裂或遇到分叉点,则将该端点剔除,为计算端点的切线斜率做准备;
由步骤3得到的端点和间隔4个像素点的3个点,计算分叉点的3条脊线的切线斜率,公式如下:
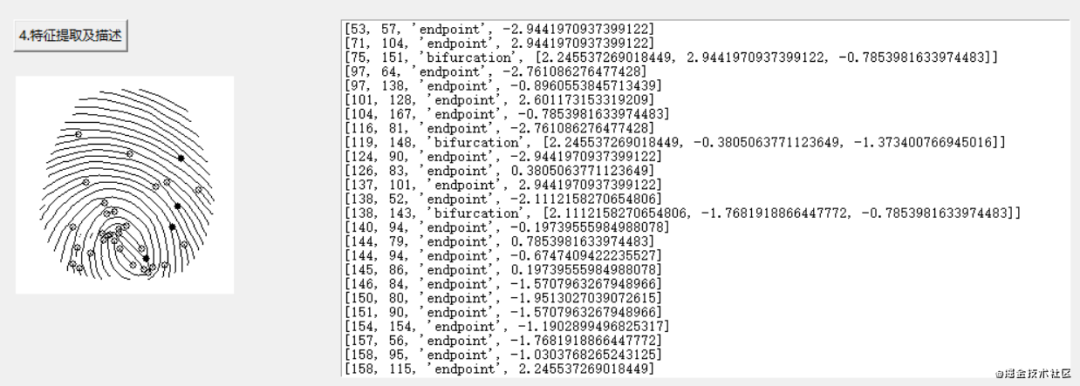
五、最终效果图

推荐阅读
(点击标题可跳转阅读)
通俗易懂之最小二乘法(附matlab和python例子实现)
老铁,三连支持一下,好吗?↓↓↓


点分享

点点赞

点在