关于PNT智能服务的研究
杨元喜1,2, 杨诚3, 任夏1,2
1. 地理信息工程国家重点实验室, 陕西 西安 710054;
2. 西安测绘研究所, 陕西 西安 710054;
3. 中国地质大学(北京)土地科学技术学院, 北京 100083
基金项目:国家自然科学基金(41931076;L1924033);国家自然科学基金青年基金(41804036;41904042)
定位导航定时(PNT)发展的重要方向是智能PNT服务。智能PNT服务必须首先感知用户PNT服务需求, 以及用户所处的相关环境, 进而实现多源PNT信息智能集成、观测模型智能优化及多源PNT信息智能融合,最终实现PNT信息的智能推送。
本文从PNT智能感知、智能模型、智能数据融合到智能服务各个环节论述“智能PNT”的关键技术, 并分析其内涵;提出PNT信息智能集成的“可用性准则”, PNT观测函数模型智能优化的“可靠性准则”, PNT多源观测随机模型优化依据的“不确定性准则”, 多源PNT信息融合的“精确性准则”, PNT服务的“高效性准则”及高动态用户的“连续性准则”。分析认为, 综合PNT是弹性PNT的基础, 弹性PNT是智能PNT的基础,智能PNT是PNT服务的重点发展方向。
关键词:定位 导航定时 智能感知 智能模型 智能融合 智能服务

引文格式:杨元喜, 杨诚, 任夏. PNT智能服务[J]. 测绘学报,2021,50(8):1006-1012. DOI: 10.11947/j.AGCS.2021.20210051
YANG Yuanxi, YANG Cheng, REN Xia. PNT intelligent services[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(8): 1006-1012. DOI: 10.11947/j.AGCS.2021.20210051
人工智能(artificial intelligence,简称AI)是计算机科学的一个分支。自从20世纪50年代人工智能理论被提出,已经渗入到各行各业,拥有较为完整的理论框架和算法体系[3]。人工智能的核心是将专家智慧变成机器智能,实现机器代替人的行为和操作。主要分支领域包括机器人、语言识别、图像识别、自然语言处理和专家系统[3-4]。
近几年,人工智能的发展,促进了测绘科学与技术的智能化进展。在互联网人与人信息便捷交互的大背景下,满足人与社会及人与环境多种需求的泛在测绘成为可能[5]。但是,要实现智能化测绘与服务需求,互联网、物联网必须向具有精准时空位置感知能力的泛在网演进;在综合对地观测日臻完善的大背景下,各类地理空间信息将十分丰富,于是,未来实现用户定位、导航、授时、影像及地理信息的实时智能服务不仅成为可能,而且会将成为趋势[6];特别是,在空天地集成化传感网的支持下,实现城市的智能感知、智能决策,即所谓的智慧城市将是智能测绘发展的重点[7]。
在卫星遥感领域,智能化遥感卫星和智能化在轨卫星遥感影像处理可能成为未来的发展趋势[8];随着各种实时影像采集方法与手段的进步,如激光扫描、倾斜摄影等海量影像数据的出现,如何从海量数据中快速、精确获取有效的三维地理信息成为测绘地理信息领域迫切需要解决的难题。于是点云数据的智能处理将成为重点研究方向之一[9]。
在PNT领域,人工智能也有着广泛的应用前景[10-11]。但是,迄今为止,PNT体系的智能往往侧重PNT信息的智能建模,如附加系统误差补偿参数的观测模型优化[12],附加周期误差补偿函数的水下声呐定位观测模型等;有的侧重于观测随机模型的智能调整,如基于方差分量估计的随机模型调整法[13-14]等;在动态导航方面,自适应Kalman滤波也采用了智能调整动力学模型贡献的方法,降低异常动力模型对动态导航的影响[15-16]。
但是,无论是智能PNT体系,还是智能PNT服务或智能PNT应用,都需要真正将计算机领域的人工智能与PNT服务相结合,解决PNT应用与服务的智能化问题,例如,PNT应用与服务的专家系统的构建,PNT服务的知识图谱建设,智能PNT服务的深度学习方法等,都需要深入研究与探讨。
智能PNT服务可定义为:将PNT专家的思想、知识和用户的需求相结合,并实现算法优化,建立适应用户需求的专家系统,再将PNT专家系统转化到机器可识别的知识图谱,最后实现PNT智能保障和智能服务的全过程。
PNT专家系统生成的“智”要转化成“能”还必须解决PNT感知与服务的逻辑推理问题,即将PNT专家系统转化为“PNT脑”,使其具备感知、分析、识别、推理和决策的能力。如此,需要将PNT专家的知识转化为“规则”,进而表示成计算机可理解的语言(即专家知识表示),也就是用计算机符号表示PNT专家大脑中的知识,并通过符号之间的运算模拟PNT专家大脑的推理过程,实现PNT专家或工程师的知识以及PNT用户需求的“可读、可写、可视、可分析、可推理”,即用逻辑支撑语义,生成知识图谱(knowledge graph)。
PNT的专家知识和知识图谱要转化成PNT服务智能,还必须实时感知PNT用户的实际需求和实际PNT应用环境,于是各类PNT信息的“可用性感知”和PNT信息的“可靠性判断”也是智能PNT应用的先决条件。这种感知PNT的应用环境和判断PNT信息的可用性、可靠性和精确性等属于机器学习范畴。机器学习是根据专家知识和知识图谱实现PNT智能的重要环节。理解用户需求是一种“学习”,判断PNT信息的可用性、可靠性和连续性等也是“学习”。实时或准实时“学习”是了解PNT环境、获取新的知识或技能的重要途径,也是重新优化已有的PNT模型和知识结构的重要内容。
监督学习通过对有标签(参考模型或参考标签)的数据进行训练,以某种误差最小准则,构建模型误差与参考模型误差之间的函数关系,从而在更广泛的应用中对模型误差进行修正,实现所谓的机器智能。如神经网络学习[19]就属于监督学习法,已有不少学者利用神经网络学习进行动力学模型改进研究[20-22]。
半监督学习法与监督学习法的区别在于,参考模型(标签)不足以作为模型优化的参考,特征较少,一般是综合利用具有部分参考标签的有限样本进行学习,获得标签数据和特征参数之间较为精确的函数关系。半监督学习法已经在室内定位方面开展过尝试[23]。
无监督学习法无须足够的先验知识,或者参考信息,一般利用训练样本解决类别未知(没有被标记)的模式识别问题,称之为无监督学习。无监督学习的典型例子是聚类学习[27],聚类学习的目的是将相似的内容聚在一起,计算相似度;此外,还有分割聚类算法如k-means算法、k-medoids算法和k近邻学习等[27]。无监督学习可以用于导航卫星信号的非视线传输(NLOS)的检测问题[28]。
如果没有冗余PNT信息,即使有专家知识,也不能生成智能,也谈不上用户PNT服务的智能决策和智能服务。因为,要将PNT科学家的“知”“识”“智”转换成PNT用户的“能”,需要足够的感知信息、冗余信息,为各类智能学习提供基础;如果还有标签信息(及外部参考信息),则更能支持机器学习(监督学习),实现PNT应用的“智”与“能”。图1给出了智能PNT信息生成的基本框架。
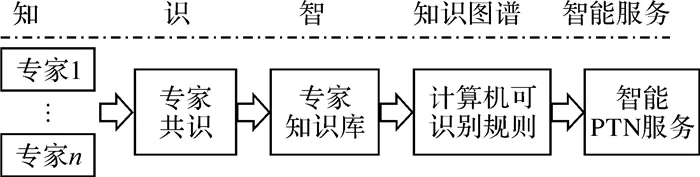
图 1 专家知识转换成机器智能流程
PNT智能服务的核心是:用最适合的PNT服务模式服务于最适合的用户。这里涉及若干关键环节,每个环节都应该遵循特定的准则。
不同环境下,即使同一类PNT感知信息,受各类环境的影响,观测误差特性也会存在差别,于是,相应的观测模型所包含的误差参数的特性和变化规律也应该有所差别。通常认为,“智能函数模型”一般是基于机器学习拟合模型误差规律,进而优化观测模型[11],其中神经网络学习法[19-22, 29]是机器学习使用最为广泛的智能学习方法之一。其实,有时很简单学习法也能起到函数模型智能优化的效果。例如开窗拟合法可以拟合模型系统误差趋势(类似于简单回归分析建模),并补偿到观测模型中,用于改进函数模型[12],属于函数模型智能优化的一种;如果在函数模型中附加待定误差补偿参数项,如周期函数、指数函数、多项式等,使函数模型更适应实际观测或实际运动学特征,也属于函数模型智能化的方法之一;所谓的弹性函数模型[2]实质上也是函数模型智能化策略之一。
作为一个典型的海洋PNT智能建模的例子,文献[30]针对不同海区的不同声速变化和声线弯曲,构建了具有周期误差函数项的观测模型,这类模型的周期和振幅是根据不同海洋环境的变化而变化的,于是这类声呐观测模型不仅显示了弹性化,也隐含了智能化。常用的函数模型优化大多数不是监督学习法,而是半监督学习(即依据部分高精度参考信息实施模型误差识别与智能优化)或自监督学习法(即根据模型参数估计后的观测残差,没有任何外部参考信息的帮助的条件下,重新拟合模型系统误差,并进行模型优化)。
特别强调,同时存在显著的函数模型误差和随机模型误差,则需要同时优化函数模型和随机模型,这类混合智能模型优化十分困难,值得深入研究。
笔者早期建立的自适应Kalman滤波[15-16]理论,将动力学模型信息与实时PNT感知信息实施自适应融合,即根据动力学模型信息与观测模型信息的偏差,确定动力学模型信息和观测信息在PNT融合结果中的贡献,这是简单的智能融合;之后建立的多源导航传感器自适应融合模型[33]也属于PNT信息的智能数据融合。当然,智能PNT数据融合存在复杂的环境适应性判断,需要实时感知各类PNT观测信息的不确定性和观测模型的可靠性。
当“综合PNT服务平台”感知用户需求,并能实施用户需求的智能判断,则可以实现对用户PNT服务的智能推送。显然,智能PNT服务的核心是为合作用户提供或推荐多手段集成的最实用的、最精确的、最可靠的PNT信息。上述智能PNT服务流程及遵循的准则如图2所示。

智能PNT的核心是智能PNT服务和应用。只有将PNT专家的“知”与“识”规则化,生成PNT应用的“智”,即专家知识库,计算机才能识别和利用专家知识;在专家知识库的基础上,还需进一步生成PNT知识图谱,使专家知识转化成计算机可识别的语言,为智能PNT的“能”提供基础。
PNT智能服务的准则可以归纳为:PNT信息集成的可用准则,函数模型智能优化的可靠性准则,随机模型智能优化的不确定性准则,信息智能融合的精确性准则,大众用户PNT信息智能应用的高效性准则,以及高安全用户PNT应用的高连续性和完好性准则。
总体来说,PNT智能服务是感知、经验、理论、模型、技术、方法、效能的综合,智能PNT体系及智能PNT应用的研究才刚刚起步,需要研究的内容十分丰富。
作者简介
第一作者简介:杨元喜(1956—),男,博士, 研究员,中国科学院院士,主要从事动态大地测量数据与卫星导航数据处理研究。
更多行业动态资讯