
四元数与3D旋转实例! Cocos Creator 3D Quternion !
用几个实用的例子带你理解四元数!文末获取完整项目!
前言
本文不会讲太多四元数公式的推导过程,重点讲讲几个接口的使用和个人理解。
阅读本文可能需要一些前置的知识(但不限于这些知识点):
向量 (内积外积/基本运算/几何意义) 坐标系(左手系/右手系/世界坐标/本地坐标) 矩阵(平移/旋转/缩放/模型矩阵/视图矩阵/投影矩阵) 视点和视线(视点/观察目标/上方向)
表示3D旋转一般采用三种方法:
矩阵 欧拉角 四元数
为什么使用四元数表示旋转呢?
平滑插值。(矩阵基本没有,欧拉角可以做插值,但可能遭遇万向锁的问题) 快速连接和角位移求逆。 能和矩阵快速转换。 仅用四个数。(矩阵9个,欧拉角3个) 难以理解,学会了看起来很牛逼。
当然四元数也有一些缺点:
四元数可能不合法。(一般通过四元数标准化解决这个问题,确保四元数为单位四元数) 对给定的方位的表达方式有两种方法,它们相互为负。(矩阵唯一,欧拉角有无数种) 相对难以使用。
实例
构造四元数
四元数的定义这边就不详细说了,大概知道就是用四个数字去表达旋转。
那么怎么去构造这个四元数呢?我们从API入手去讲解和理解。
旋转轴和旋转角
有了旋转轴和旋转角,就可以表示旋转了,那么四元数也可以通过这个构造出来。
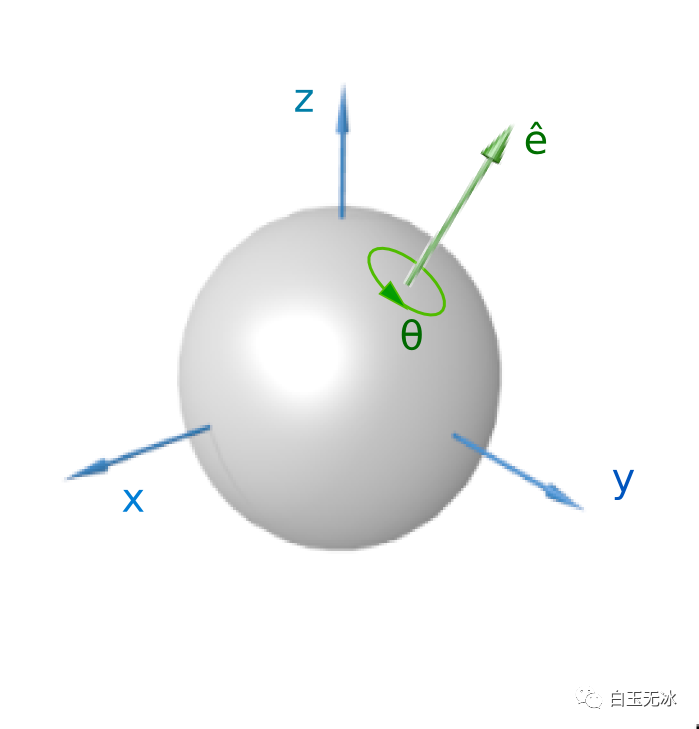
/**
* @zh 根据旋转轴和旋转弧度计算四元数
*/
public static fromAxisAngleextends IQuatLike, VecLike extends IVec3Like> (out: Out, axis: VecLike, rad: number) {
rad = rad * 0.5; // 为什么要除以2?因为公式推导出来的!
const s = Math.sin(rad);
out.x = s * axis.x;
out.y = s * axis.y;
out.z = s * axis.z;
out.w = Math.cos(rad);
return out;
}
本地坐标轴
根据该物体本地坐标轴也能确定旋转。
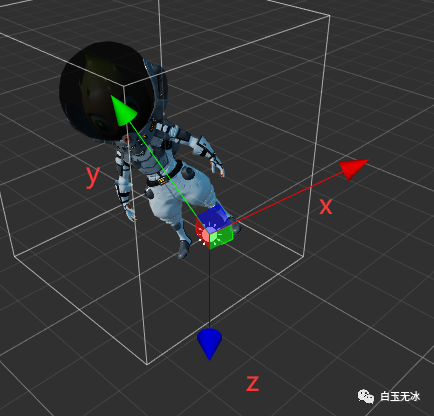
/**
* @zh 根据本地坐标轴朝向计算四元数,默认三向量都已归一化且相互垂直
*/
public static fromAxesextends IQuatLike, VecLike extends IVec3Like> (out: Out, xAxis: VecLike, yAxis: VecLike, zAxis: VecLike) {
Mat3.set(m3_1,
xAxis.x, xAxis.y, xAxis.z,
yAxis.x, yAxis.y, yAxis.z,
zAxis.x, zAxis.y, zAxis.z,
);
return Quat.normalize(out, Quat.fromMat3(out, m3_1));
}
视口和上方向
根据视口的前方向和上方向,先计算本地坐标轴的右向量,再算出本地坐标的上向量,最后再构造成四元数。
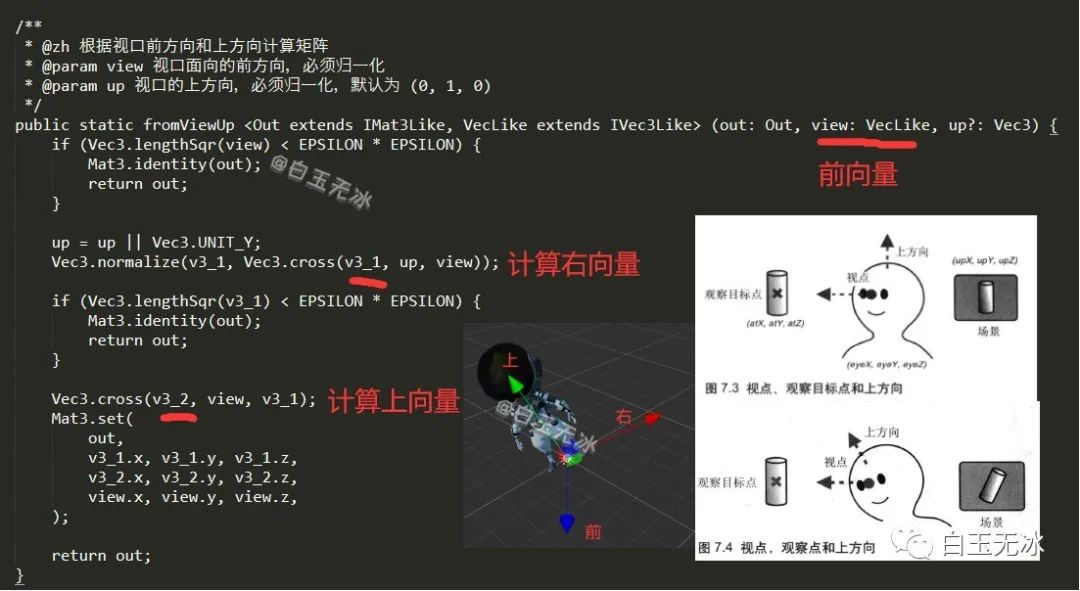
/**
* @zh 根据视口的前方向和上方向计算四元数
* @param view 视口面向的前方向,必须归一化
* @param up 视口的上方向,必须归一化,默认为 (0, 1, 0)
*/
public static fromViewUpextends IQuatLike, VecLike extends IVec3Like> (out: Out, view: VecLike, up?: Vec3) {
Mat3.fromViewUp(m3_1, view, up);
return Quat.normalize(out, Quat.fromMat3(out, m3_1));
}
两向量间的最短路径旋转
也可以用一个四元数表示两向量旋转的最短路径。
/**
* @zh 设置四元数为两向量间的最短路径旋转,默认两向量都已归一化
*/
public static rotationToextends IQuatLike, VecLike extends IVec3Like> (out: Out, a: VecLike, b: VecLike) {
// 省略代码实现
}
矩阵/欧拉角
也可以通过其他表示方法转换为四元数。
/**
* @zh 根据三维矩阵信息计算四元数,默认输入矩阵不含有缩放信息
*/
public static fromMat3extends IQuatLike> (out: Out, m: Mat3) {
// 省略代码实现
}
/**
* @zh 根据欧拉角信息计算四元数,旋转顺序为 YZX
*/
public static fromEulerextends IQuatLike> (out: Out, x: number, y: number, z: number) {
// 省略代码实现
}
获取四元数相关信息
上面讲了如何去构造,相应的也可以通过四元数获取相关信息,这里不细讲了含义了,直接看看API吧。
/**
* @zh 获取四元数的旋转轴和旋转弧度
* @param outAxis 旋转轴输出
* @param q 源四元数
* @return 旋转弧度
*/
public static getAxisAngleextends IQuatLike, VecLike extends IVec3Like> (outAxis: VecLike, q: Out) {
//...
}
/**
* @zh 返回定义此四元数的坐标系 X 轴向量
*/
public static toAxisX (out: IVec3Like, q: IQuatLike) {
//...
}
/**
* @zh 返回定义此四元数的坐标系 Y 轴向量
*/
public static toAxisY (out: IVec3Like, q: IQuatLike) {
//...
}
/**
* @zh 返回定义此四元数的坐标系 Z 轴向量
*/
public static toAxisZ (out: IVec3Like, q: IQuatLike) {
//...
}
/**
* @zh 根据四元数计算欧拉角,返回角度 x, y 在 [-180, 180] 区间内, z 默认在 [-90, 90] 区间内,旋转顺序为 YZX
* @param outerZ z 取值范围区间改为 [-180, -90] U [90, 180]
*/
public static toEuler (out: IVec3Like, q: IQuatLike, outerZ?: boolean) {
//...
}
实际例子
没有实战,单纯讲API就是耍流氓!直接进入实战部分!
角色朝向和平滑插值
已知当前点和下一个点,如何求出角色的朝向四元数?
先算出前方向 根据视口上方向求出四元数
const cur_p = list[index - 1]; // 当前点
const next_p = list[index]; // 最终点
const quat_end = new Quat(); // 最终旋转四元数
const dir = next_p.clone().subtract(cur_p); // 前向量
// 模型正好朝z轴方向
Quat.fromViewUp(quat_end, dir.normalize(), v3(0, 1, 0)); // 根据视口的前方向和上方向计算四元数
// 最终旋转四元数 / 视口面向的前方向 / 视口的上方向
已知起始四元数和终点四元数,如何平滑旋转?
const tw = tween(this.node_bezier_role); // 使用tween动画
const quat_start = new Quat();
this.node_bezier_role.getRotation(quat_start); // 获取起始四元数
const quat_end = new Quat(); // 最终旋转四元数 假设已经算出
const quat_now = new Quat(); // 用一个中间变量
tw.to(0.2, {}, {
onUpdate: (target, ratio: number) => {
// ratio : 0~1
// 这里使用球面插值,旋转时不会出现变形
quat_now.set(quat_start).slerp(quat_end, ratio);
this.node_bezier_role.setRotation(quat_now);
},
})
tw.start();
将旋转和移动结合起来就能达到下面这个效果。

触摸旋转
关键是求出旋转轴,这边处理的旋转轴在 xoy 这个平面上。
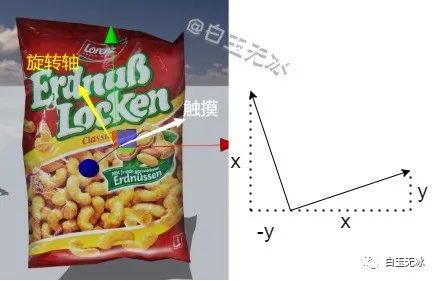
// private onTouchMove(touch: Touch) {
const delta = touch.getDelta();
// 自传
// 这个物体模型‘锚点’在正中心效果比较好
// 垂直的轴,右手
//
// 旋转轴
// ↑
// ---> 触摸方向
const axis = v3(-delta.y, delta.x, 0); //旋转轴,根据相似三角形求出
const rad = delta.length() * 1e-2; //旋转角度
const quat_cur = this.node_touch_rotation_role.getRotation(); //当前的四元数
Quat.rotateAround(this.__temp_quat, quat_cur, axis.normalize(), rad); //当面的四元数绕旋转轴旋转
// 旋转后的结果 / 当前的四元数 / 旋转轴 / 旋转四元数
this.node_touch_rotation_role.setRotation(this.__temp_quat);
展示结果如下:

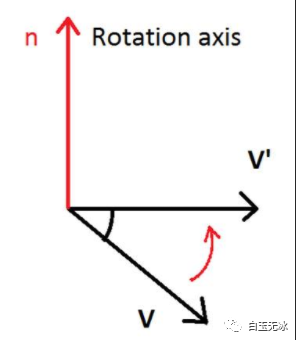
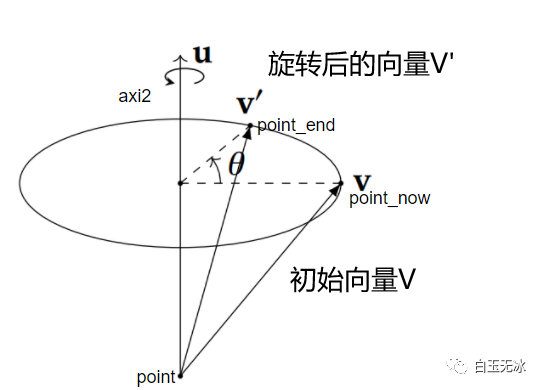
绕轴旋转
已知旋转点、旋转轴、旋转角度,求旋转后的位置和朝向。
朝向计算和触摸旋转类似,这里不详说了。
这边讲讲如何计算旋转后的坐标。
先计算旋转点和当前位置点的向量(起始向量) 计算旋转四元数 计算起始向量旋转后的向量 计算旋转后的坐标点
// private onTouchMove(touch: Touch) {
const delta = touch.getDelta();
// 绕轴转
// 这里选取轴朝上
const axis2 = Vec3.UP;//旋转轴
const rad2 = 1e-2 * delta.x; //旋转角度
// 计算坐标
const point = this.node_axi.worldPosition; //旋转点
const point_now = this.node_touch_axi_role.worldPosition; // 当前点的位置
// 算出坐标点的旋转四元数
Quat.fromAxisAngle(this.__temp_quat, axis2, rad2);
// 计算旋转点和现有点的向量
Vec3.subtract(this.__temp_v3, point_now, point);
// 计算旋转后的向量
Vec3.transformQuat(this.__temp_v3, this.__temp_v3, this.__temp_quat)
// 计算旋转后的点
Vec3.add(this.__temp_v3, point, this.__temp_v3);
this.node_touch_axi_role.setWorldPosition(this.__temp_v3);
// 计算朝向
// 这么旋转会按原始的朝向一起旋转
const quat_now = this.node_touch_axi_role.worldRotation;
Quat.rotateAround(this.__temp_quat, quat_now, axis2, rad2);
Quat.normalize(this.__temp_quat, this.__temp_quat);
this.node_touch_axi_role.setWorldRotation(this.__temp_quat);
最终效果如下。
小结
可以把四元数当作一个工具,想想旋转可以是用轴角度,本地坐标系,或者视角方向构造出来的,再使用相应的接口去实现我们的各种需求。
以上为白玉无冰使用 Cocos Creator 3D v1.2 实现 "四元数与旋转" 的技术分享。欢迎分享给身边的朋友!
参考
《WebGL编程指南》 《3D数学基础:图形与游戏开发》 https://docs.cocos.com/creator3d/api/zh/classes/core_math.quat.html https://en.wikipedia.org/wiki/Quaternion https://eater.net/quaternions https://github.com/Krasjet/quaternion https://forum.cocos.org/t/creator-3d-unity-transfrom-rotatearound-api/85157/5 https://forum.cocos.org/t/topic/92924/11 https://forum.cocos.org/t/creator-3d/91299
转载请保留文末二维码和完整代码获取方式!
完整代码(详见readme):
https://github.com/baiyuwubing/cocos-creator-3d-examples/tree/master/1-2-x
点击“阅读原文”查看精选导航
‘赞赏’“点赞“ ”在看” 鼓励一下 ▼
▼