
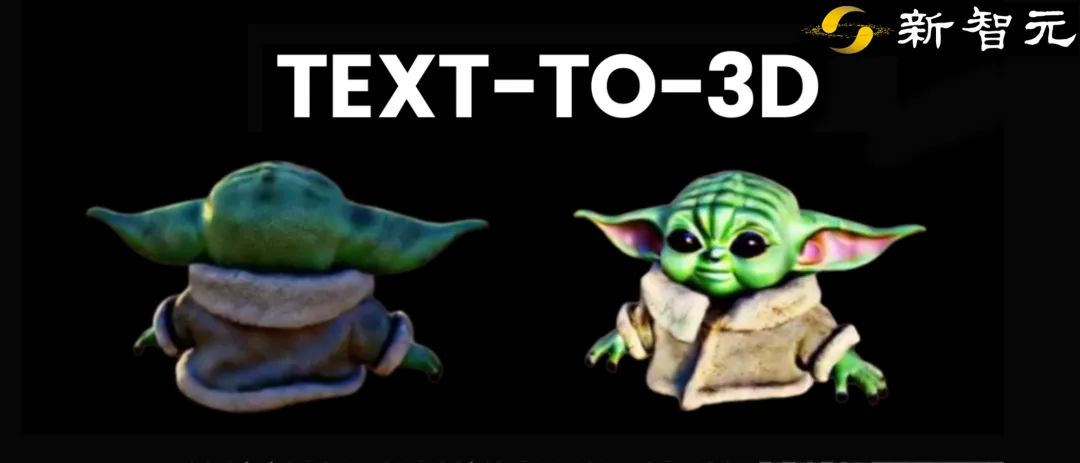
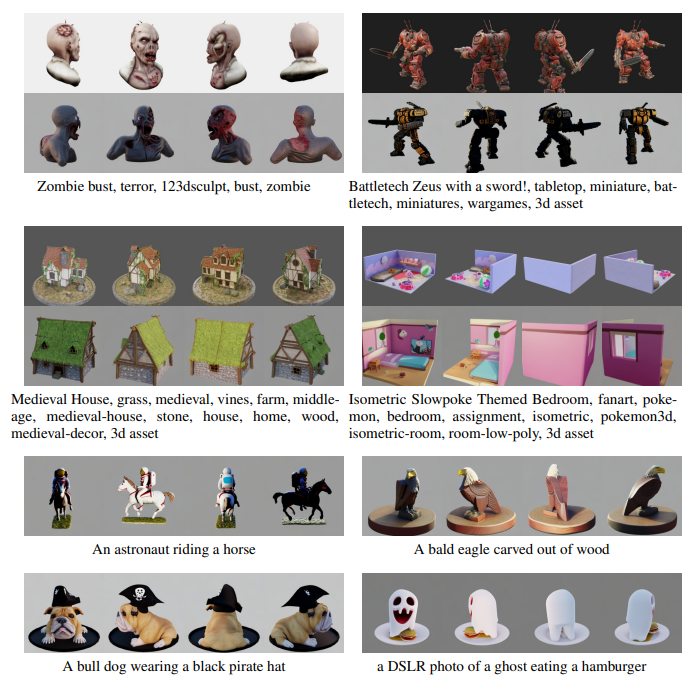
文生3D模型大突破!MVDream重磅来袭,一句话生成超逼真三维模型
新智元报道
新智元报道
【新智元导读】文生3D模型进步!分数蒸馏采样下的MVDream,真的有这么神奇吗?真的有。
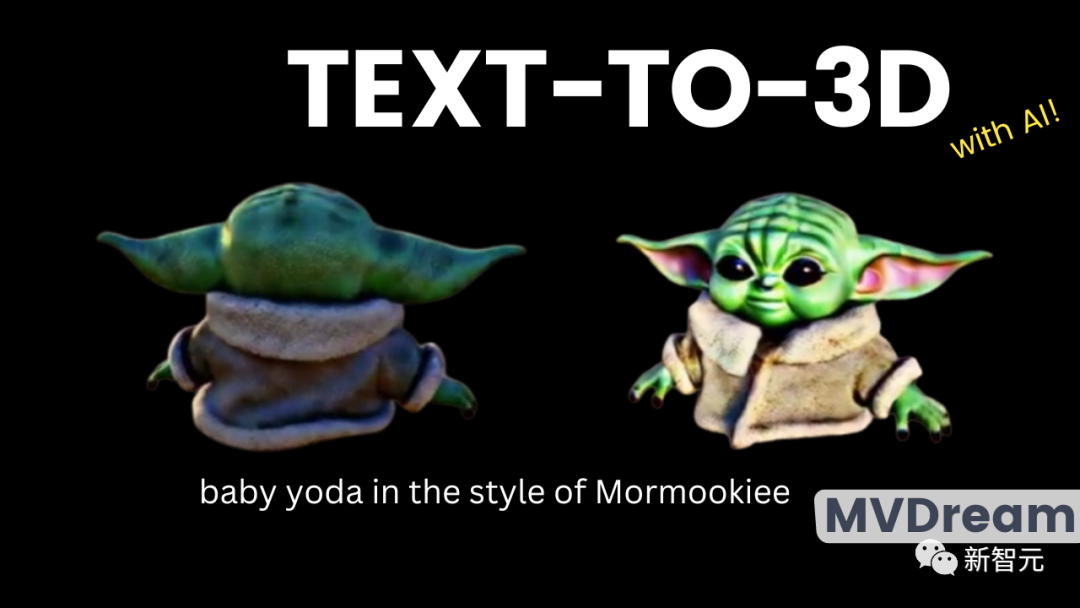
MVDream
分数蒸馏采样



评论