机器人行走背后的机械原理~ 简洁又震撼~
正文
大家好,我是小猿~

1.平行四杆机构

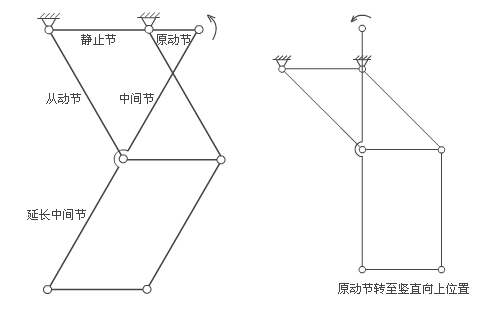
2.切比雪夫连杆机构

3. 克兰连杆机构

4. Jansen 连杆机构
5.波塞利连杆机构
6.瓦特连杆
7.其他模仿行走的机构
素材来源:源于网络,见原文链接
版权归原作者所有,仅供学习参考和分享,如涉及作品版权问题,请联系我进行删除,感谢~
最后
觉得有所收获,记得点个赞哦~

评论
 下载APP
下载APP正文
大家好,我是小猿~
1.平行四杆机构
2.切比雪夫连杆机构
3. 克兰连杆机构
4. Jansen 连杆机构
5.波塞利连杆机构
6.瓦特连杆
7.其他模仿行走的机构
素材来源:源于网络,见原文链接
版权归原作者所有,仅供学习参考和分享,如涉及作品版权问题,请联系我进行删除,感谢~
最后
觉得有所收获,记得点个赞哦~