
自动驾驶汽车的传感器该如何布置?
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
来源:智车科技
/ 导读 /
“无人驾驶汽车的研究越来越多,各环境感知传感器的分布位置也不同,到底这些传感器要遵循一个什么样的布置原则?请看本文介绍。”

传感器介绍
智能驾驶汽车环境感知传感器主要有超声波雷达、毫米波雷达、激光雷达、单/双/三目摄像头、环视摄像头以及夜视设备。目前,处于开发中的典型智能驾驶车传感器配置如表 1所示。
表 1 智能驾驶汽车传感器配置
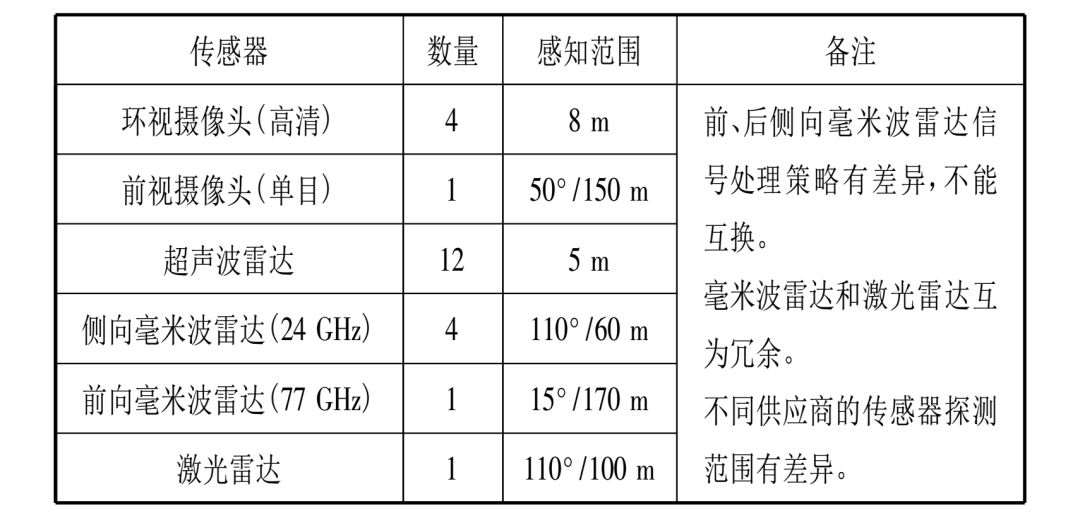
环视摄像头:主要应用于短距离场景,可识别障碍物,但对光照、天气等外在条件很敏感,技术成熟,价格低廉; 摄像头:常用有单、双、三目,主要应用于中远距离场景,能识别清晰的车道线、交通标识、障碍物、行人,但对光照、天气等条件很敏感,而且需要复杂的算法支持,对处理器的要求也比较高; 超声波雷达:主要应用于短距离场景下,如辅助泊车,结构简单、体积小、成本低; 毫米波雷达:主要有用于中短测距的 24 GHz 雷达和长测距的 77 GHz 雷达 2 种。毫米波雷达可有效提取景深及速度信息,识别障碍物,有一定的穿透雾、烟和灰尘的能力,但在环境障碍物复杂的情况下,由于毫米波依靠声波定位,声波出现漫反射,导致漏检率和误差率比较高; 激光雷达:分单线和多线激光雷达,多线激光雷达可以获得极高的速度、距离和角度分辨率,形成精确的 3D 地图,抗干扰能力强,是智能驾驶汽车发展的最佳技术路线,但是成本较高,也容易受到恶劣天气和烟雾环境的影响。

12 个超声波传感器,位于前后及侧方,4 个广角 360 度摄像头,位于前后和两侧后视镜,1 个前向摄像头,位于内后视镜后方,4 个中距离雷达,位于车辆的四角,1 个长距离雷达,位于前方,1 个红外夜视摄像头,位于前方,1 个激光扫描仪 Laser Scanner,位于前方。





本文仅做学术分享,如有侵权,请联系删文。
评论