
解决一个I2C读写问题
之前写关于I2C相关的文章
1、问题
今天遇到一个问题,我们有一个芯片,I2C读写失败,导致录音有问题,而且是偶现的。
log提示看到是返回 -6
<3>[ 730.336308] (3)[2085:tinycap]es7243_read error2, ret = -6.
下面流程找一下这个 -6 是从哪里来的
2、I2c 发送流程
i2c-core.c
调用发送函数
/**
* __i2c_transfer - unlocked flavor of i2c_transfer
* @adap: Handle to I2C bus
* @msgs: One or more messages to execute before STOP is issued to
* terminate the operation; each message begins with a START.
* @num: Number of messages to be executed.
*
* Returns negative errno, else the number of messages executed.
*
* Adapter lock must be held when calling this function. No debug logging
* takes place. adap->algo->master_xfer existence isn't checked.
*/
int __i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
{
unsigned long orig_jiffies;
int ret, try;
if (adap->quirks && i2c_check_for_quirks(adap, msgs, num))
return -EOPNOTSUPP;
/* i2c_trace_msg gets enabled when tracepoint i2c_transfer gets
* enabled. This is an efficient way of keeping the for-loop from
* being executed when not needed.
*/
if (static_key_false(&i2c_trace_msg)) {
int i;
for (i = 0; i < num; i++)
if (msgs[i].flags & I2C_M_RD)
trace_i2c_read(adap, &msgs[i], i);
else
trace_i2c_write(adap, &msgs[i], i);
}
/* Retry automatically on arbitration loss */
orig_jiffies = jiffies;
for (ret = 0, try = 0; try <= adap->retries; try++) {
ret = adap->algo->master_xfer(adap, msgs, num);
if (ret != -EAGAIN)
break;
if (time_after(jiffies, orig_jiffies + adap->timeout))
break;
}
if (static_key_false(&i2c_trace_msg)) {
int i;
for (i = 0; i < ret; i++)
if (msgs[i].flags & I2C_M_RD)
trace_i2c_reply(adap, &msgs[i], i);
trace_i2c_result(adap, i, ret);
}
return ret;
}
EXPORT_SYMBOL(__i2c_transfer);
里面有一句
ret = adap->algo->master_xfer(adap, msgs, num);
这里需要找到初始化的位置,这种指针初始化的位置,一般都是和平台设备相关的,这里也是一个技巧,初学者看到这类指针一般都会比较懵。
所以,就开始去找吧。
因为我用的是MTK平台,所以需要去找到MTK平台相关里面初始化的这个指针
i2c-mt65xx.c (D:\source\kernel-4.4\drivers\i2c\busses) line 755 : .master_xfer = mtk_i2c_transfer,
在文件
i2c-mt65xx.c
这里初始化了
static const struct i2c_algorithm mtk_i2c_algorithm = {
.master_xfer = mtk_i2c_transfer,
.functionality = mtk_i2c_functionality,
};
然后再调用发送函数
static int mtk_i2c_transfer(struct i2c_adapter *adap,
struct i2c_msg msgs[], int num)
{
int ret;
int left_num = num;
struct mtk_i2c *i2c = i2c_get_adapdata(adap);
ret = mtk_i2c_clock_enable(i2c);
if (ret)
return ret;
i2c->auto_restart = i2c->dev_comp->auto_restart;
/* checking if we can skip restart and optimize using WRRD mode */
if (i2c->auto_restart && num == 2) {
if (!(msgs[0].flags & I2C_M_RD) && (msgs[1].flags & I2C_M_RD) &&
msgs[0].addr == msgs[1].addr) {
i2c->auto_restart = 0;
}
}
if (i2c->auto_restart && num >= 2 && i2c->speed_hz > MAX_FS_MODE_SPEED)
/* ignore the first restart irq after the master code,
* otherwise the first transfer will be discarded.
*/
i2c->ignore_restart_irq = true;
else
i2c->ignore_restart_irq = false;
while (left_num--) {
if (!msgs->buf) {
dev_dbg(i2c->dev, "data buffer is NULL.\n");
ret = -EINVAL;
goto err_exit;
}
if (msgs->flags & I2C_M_RD)
i2c->op = I2C_MASTER_RD;
else
i2c->op = I2C_MASTER_WR;
if (!i2c->auto_restart) {
if (num > 1) {
/* combined two messages into one transaction */
i2c->op = I2C_MASTER_WRRD;
left_num--;
}
}
/* len <= 8: use fifo mode, len > 8: use DMA mode. */
ret = mtk_i2c_do_transfer(i2c, msgs, num, left_num);
if (ret < 0)
goto err_exit;
msgs++;
}
/* the return value is number of executed messages */
ret = num;
err_exit:
mtk_i2c_clock_disable(i2c);
return ret;
}
3、返回 值的代码位置
在文件
i2c-mt65xx.c
中的函数
static int mtk_i2c_do_transfer(struct mtk_i2c *i2c, struct i2c_msg *msgs,
int num, int left_num)
{
bool dma_en;
u8 *data_buf;
u16 data_len;
u16 read_len;
u16 addr_reg;
u16 start_reg;
u16 control_reg;
u16 restart_flag = 0;
u32 reg_4g_mode;
dma_addr_t rpaddr = 0;
dma_addr_t wpaddr = 0;
int ret;
i2c->irq_stat = 0;
if (i2c->auto_restart)
restart_flag = I2C_RS_TRANSFER;
reinit_completion(&i2c->msg_complete);
control_reg = readw(i2c->base + OFFSET_CONTROL) &
~(I2C_CONTROL_DIR_CHANGE | I2C_CONTROL_RS);
if ((i2c->speed_hz > 400000) || (left_num >= 1))
control_reg |= I2C_CONTROL_RS;
if (i2c->op == I2C_MASTER_WRRD)
control_reg |= I2C_CONTROL_DIR_CHANGE | I2C_CONTROL_RS;
writew(control_reg, i2c->base + OFFSET_CONTROL);
/* set start condition */
if (i2c->speed_hz <= 100000)
writew(I2C_ST_START_CON, i2c->base + OFFSET_EXT_CONF);
else
writew(I2C_FS_START_CON, i2c->base + OFFSET_EXT_CONF);
addr_reg = msgs->addr << 1;
if (i2c->op == I2C_MASTER_RD)
addr_reg |= 0x1;
writew(addr_reg, i2c->base + OFFSET_SLAVE_ADDR);
/* Clear interrupt status */
writew(restart_flag | I2C_HS_NACKERR | I2C_ACKERR |
I2C_TRANSAC_COMP, i2c->base + OFFSET_INTR_STAT);
writew(I2C_FIFO_ADDR_CLR, i2c->base + OFFSET_FIFO_ADDR_CLR);
/* Enable interrupt */
writew(restart_flag | I2C_HS_NACKERR | I2C_ACKERR |
I2C_TRANSAC_COMP, i2c->base + OFFSET_INTR_MASK);
/* Set transfer and transaction len */
if (i2c->op == I2C_MASTER_WRRD) {
if (i2c->dev_comp->aux_len_reg) {
writew(msgs->len, i2c->base + OFFSET_TRANSFER_LEN);
writew((msgs + 1)->len, i2c->base +
OFFSET_TRANSFER_LEN_AUX);
} else {
writew(msgs->len | ((msgs + 1)->len) << 8,
i2c->base + OFFSET_TRANSFER_LEN);
}
writew(I2C_WRRD_TRANAC_VALUE, i2c->base + OFFSET_TRANSAC_LEN);
} else {
writew(msgs->len, i2c->base + OFFSET_TRANSFER_LEN);
writew(num, i2c->base + OFFSET_TRANSAC_LEN);
}
/* Prepare buffer data to start transfer */
if (msgs->len > I2C_FIFO_SIZE || (i2c->op == I2C_MASTER_WRRD &&
(msgs + 1)->len > I2C_FIFO_SIZE)) {
dma_en = true;
if (i2c->op == I2C_MASTER_RD) {
writel(I2C_DMA_INT_FLAG_NONE, i2c->pdmabase + OFFSET_INT_FLAG);
writel(I2C_DMA_CON_RX, i2c->pdmabase + OFFSET_CON);
rpaddr = dma_map_single(i2c->dev, msgs->buf,
msgs->len, DMA_FROM_DEVICE);
if (dma_mapping_error(i2c->dev, rpaddr))
return -ENOMEM;
if (i2c->dev_comp->support_33bits) {
reg_4g_mode = mtk_i2c_set_4g_mode(rpaddr);
writel(reg_4g_mode, i2c->pdmabase + OFFSET_RX_4G_MODE);
}
writel((u32)rpaddr, i2c->pdmabase + OFFSET_RX_MEM_ADDR);
writel(msgs->len, i2c->pdmabase + OFFSET_RX_LEN);
} else if (i2c->op == I2C_MASTER_WR) {
writel(I2C_DMA_INT_FLAG_NONE, i2c->pdmabase + OFFSET_INT_FLAG);
writel(I2C_DMA_CON_TX, i2c->pdmabase + OFFSET_CON);
wpaddr = dma_map_single(i2c->dev, msgs->buf,
msgs->len, DMA_TO_DEVICE);
if (dma_mapping_error(i2c->dev, wpaddr))
return -ENOMEM;
if (i2c->dev_comp->support_33bits) {
reg_4g_mode = mtk_i2c_set_4g_mode(wpaddr);
writel(reg_4g_mode, i2c->pdmabase + OFFSET_TX_4G_MODE);
}
writel((u32)wpaddr, i2c->pdmabase + OFFSET_TX_MEM_ADDR);
writel(msgs->len, i2c->pdmabase + OFFSET_TX_LEN);
} else {
writel(I2C_DMA_CLR_FLAG, i2c->pdmabase + OFFSET_INT_FLAG);
writel(I2C_DMA_CLR_FLAG, i2c->pdmabase + OFFSET_CON);
wpaddr = dma_map_single(i2c->dev, msgs->buf,
msgs->len, DMA_TO_DEVICE);
if (dma_mapping_error(i2c->dev, wpaddr))
return -ENOMEM;
rpaddr = dma_map_single(i2c->dev, (msgs + 1)->buf,
(msgs + 1)->len, DMA_FROM_DEVICE);
if (dma_mapping_error(i2c->dev, rpaddr)) {
dma_unmap_single(i2c->dev, wpaddr,
msgs->len, DMA_TO_DEVICE);
return -ENOMEM;
}
if (i2c->dev_comp->support_33bits) {
reg_4g_mode = mtk_i2c_set_4g_mode(wpaddr);
writel(reg_4g_mode, i2c->pdmabase + OFFSET_TX_4G_MODE);
reg_4g_mode = mtk_i2c_set_4g_mode(rpaddr);
writel(reg_4g_mode, i2c->pdmabase + OFFSET_RX_4G_MODE);
}
writel((u32)wpaddr, i2c->pdmabase + OFFSET_TX_MEM_ADDR);
writel((u32)rpaddr, i2c->pdmabase + OFFSET_RX_MEM_ADDR);
writel(msgs->len, i2c->pdmabase + OFFSET_TX_LEN);
writel((msgs + 1)->len, i2c->pdmabase + OFFSET_RX_LEN);
}
if (i2c->op != I2C_MASTER_RD)
writel(I2C_DMA_START_EN, i2c->pdmabase + OFFSET_EN);
} else {
dma_en = false;
if (i2c->op != I2C_MASTER_RD) {
data_buf = msgs->buf;
data_len = msgs->len;
while (data_len--)
writew_relaxed(*(data_buf++), i2c->base + OFFSET_DATA_PORT);
}
}
if (!i2c->auto_restart) {
start_reg = I2C_TRANSAC_START;
} else {
start_reg = I2C_TRANSAC_START | I2C_RS_MUL_TRIG;
if (left_num >= 1)
start_reg |= I2C_RS_MUL_CNFG;
}
writew(start_reg, i2c->base + OFFSET_START);
if (dma_en && i2c->op == I2C_MASTER_RD)
writel(I2C_DMA_START_EN, i2c->pdmabase + OFFSET_EN);
ret = wait_for_completion_timeout(&i2c->msg_complete,
i2c->adap.timeout);
/* Clear interrupt mask */
writew(~(restart_flag | I2C_HS_NACKERR | I2C_ACKERR |
I2C_TRANSAC_COMP), i2c->base + OFFSET_INTR_MASK);
if (dma_en) {
if (i2c->op == I2C_MASTER_WR) {
dma_unmap_single(i2c->dev, wpaddr,
msgs->len, DMA_TO_DEVICE);
} else if (i2c->op == I2C_MASTER_RD) {
dma_unmap_single(i2c->dev, rpaddr,
msgs->len, DMA_FROM_DEVICE);
} else {
dma_unmap_single(i2c->dev, wpaddr, msgs->len,
DMA_TO_DEVICE);
dma_unmap_single(i2c->dev, rpaddr, (msgs + 1)->len,
DMA_FROM_DEVICE);
}
}
if (ret == 0) {
dev_dbg(i2c->dev, "addr: %x, transfer timeout\n", msgs->addr);
mtk_i2c_init_hw(i2c);
return -ETIMEDOUT;
}
completion_done(&i2c->msg_complete);
if (i2c->irq_stat & (I2C_HS_NACKERR | I2C_ACKERR)) {
dev_dbg(i2c->dev, "addr: %x, transfer ACK error\n", msgs->addr);
mtk_i2c_init_hw(i2c);
return -ENXIO;
}
if (!dma_en && i2c->op != I2C_MASTER_WR) {
data_buf = (i2c->op == I2C_MASTER_RD) ? msgs->buf :
(msgs + 1)->buf;
data_len = (i2c->op == I2C_MASTER_RD) ? msgs->len :
(msgs + 1)->len;
read_len = (readw(i2c->base + OFFSET_FIFO_STAT) >> 4) & 0xf;
if (read_len == data_len) {
while (data_len--)
*(data_buf++) = readw_relaxed(i2c->base + OFFSET_DATA_PORT);
} else {
dev_dbg(i2c->dev, "data_len %x, read_len %x, fifo read len error\n",
data_len, read_len);
mtk_i2c_init_hw(i2c);
return -EIO;
}
}
return 0;
}
下面这段代码
if (i2c->irq_stat & (I2C_HS_NACKERR | I2C_ACKERR)) {
dev_dbg(i2c->dev, "addr: %x, transfer ACK error\n", msgs->addr);
mtk_i2c_init_hw(i2c);
return -ENXIO;
}
宏定义
errno-base.h
#define ENXIO 6 /* No such device or address */
表示就是找不到设备,没有应答
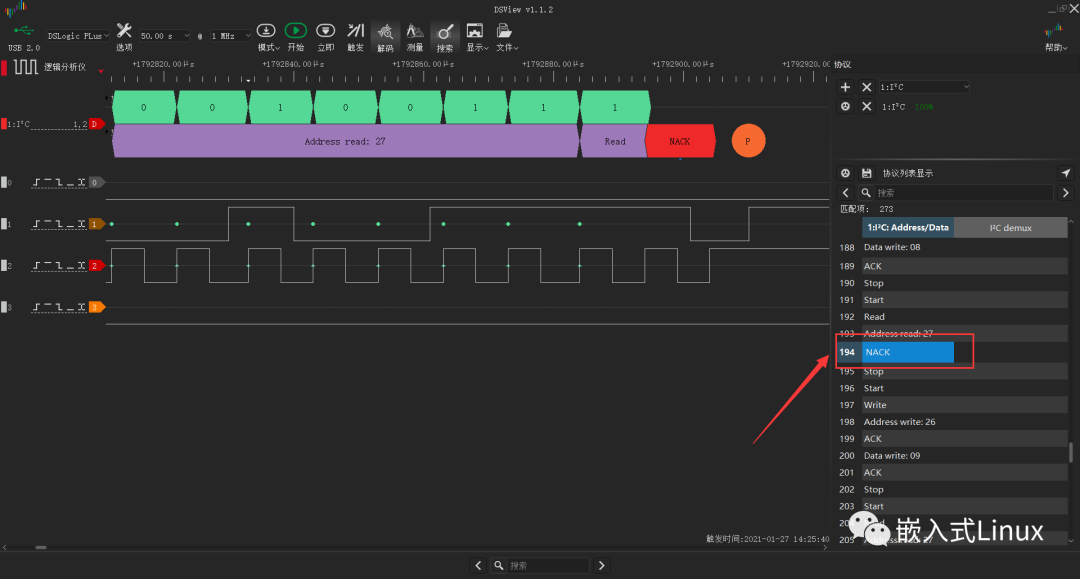
我用逻辑分析仪抓波形,确实存在没有应答的情况下打印了上面的错误日志。
解决
问题日志
<6>[ 1594.422871] (3)[1663:AudioInMic][ES7243]: es7243_pcm_startup() line: 444 start.
<6>[ 1594.432778] (3)[1663:AudioInMic][ES7243]: es7243_pcm_startup() line: 444 start.
<6>[ 1594.432902] (3)[1663:AudioInMic][ES7243]: es7243_pcm_hw_params() line: 472 es7243_pcm_hw_params
<6>[ 1594.432918] (3)[1663:AudioInMic][ES7243]: es7243_set_bias_level() line: 568 level:1
<6>[ 1594.433367] (3)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x00 val:0x09 ok
<6>[ 1594.433741] (0)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x06 val:0x18 ok
<6>[ 1594.434121] (2)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x07 val:0x80 ok
<6>[ 1594.434506] (0)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x01 val:0x0c ok
<6>[ 1594.434886] (0)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x02 val:0x10 ok
<6>[ 1594.435288] (2)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x03 val:0x04 ok
<6>[ 1594.435682] (3)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x04 val:0x02 ok
<6>[ 1594.436136] (1)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x05 val:0x1a ok
<6>[ 1594.436574] (3)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x09 val:0x3f ok
<6>[ 1594.437004] (0)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x06 val:0x00 ok
<6>[ 1594.437424] (3)[1663:AudioInMic][ES7243]: es7243_write() line: 161 es7243_write reg:0x05 val:0x36 ok
<3>[ 1594.437676] (3)[1663:AudioInMic]es7243_write 13 error->[REG-0x08,val-0x07]
<3>[ 1594.437907] (3)[1663:AudioInMic]es7243_read error1
<3>[ 1594.438220] (3)[1663:AudioInMic]es7243_write 13 error->[REG-0x01,val-0x8c]
<6>[ 1594.438246] (3)[1663:AudioInMic][ES7243]: es7243_update_bits() line: 175 value:12
<3>[ 1594.438951] (3)[1663:AudioInMic]es7243_read error2, ret = -6.
<6>[ 1594.438990] (3)[1663:AudioInMic][ES7243]: es7243_pcm_hw_params() line: 538 es7243_pcm_hw_params538 -- Reg 08 ----> 0x0!
<3>[ 1594.439477] (3)[1663:AudioInMic]es7243_read error2, ret = -6.
<6>[ 1594.439510] (3)[1663:AudioInMic][ES7243]: es7243_pcm_hw_params() line: 540 es7243_pcm_hw_params540 -- Reg 05 ----> 0x0!
复现了十几把,发现每次都是刚开始I2C可以读写,后面再读写的时候,就容易出现I2C操作失败的情况。
FAE给的答复是
I2C走线是否有其他干扰 I2C有没有加RC滤波电路
硬件已经确定了,想再修改硬件可能性比较小,也比较麻烦,硬件测量了I2C波形,也没有发现异常。故此,还是想在软件上做规避。
我猜测可能是芯片操作过快,芯片没有来得及反应,而且每次操作开始I2C都是可以读写的,所以就想在读写函数中阻塞一会会来规避这个问题。
patch
diff --git a/kernel-4.4/sound/soc/codecs/es7243.c b/kernel-4.4/sound/soc/codecs/es7243.c
index 272f5dbf88..0e6a1e6bcc 100755
--- a/kernel-4.4/sound/soc/codecs/es7243.c
+++ b/kernel-4.4/sound/soc/codecs/es7243.c
@@ -32,6 +32,7 @@
#include
#include
#include
+#include
#ifdef CONFIG_OF
#include
#include
@@ -127,6 +128,7 @@ static int es7243_read(u8 reg, u8 *rt_value, struct i2c_client *client)
read_cmd[0] = reg;
cmd_len = 1;
+ udelay(2000);
if (client->adapter == NULL)
pr_err("es7243_read client->adapter==NULL\n");
@@ -141,6 +143,7 @@ static int es7243_read(u8 reg, u8 *rt_value, struct i2c_client *client)
pr_err("es7243_read error2, ret = %d.\n", ret);
return -1;
}
+
ES7243_DEBUG("es7243_read OK\n");
return 0;
}
@@ -153,12 +156,14 @@ static int es7243_write(u8 reg, unsigned char value, struct i2c_client *client)
write_cmd[0] = reg;
write_cmd[1] = value;
+ udelay(2000);
ret = i2c_master_send(client, write_cmd, 2);
if (ret != 2) {
pr_err("es7243_write %x error->[REG-0x%02x,val-0x%02x]\n",client->addr,reg,value);
return -1;
}
ES7243_DEBUG("es7243_write reg:0x%.2x val:0x%.2x ok \n",reg,value);
+
return 0;
}
修改后,验证了十几把,确实没有再发现问题,如果再有问题的话,再分析。

评论