
学妹问我:3D点云该怎么入门?
前段时间,实验室Boss接了一个三维点云的项目,直接丢给了刚进实验室的研一学妹。实验室之前主要是做医学图像和工业检测的,从没涉及过3D数据。整个实验室目前只有她在做这个方向,Boss对这个领域的了解也不够深入,还需要年底做出成绩。
这几天学妹和我说,她很无助,也很焦虑。只能网上找资料,一通找,结果发现是个坑,这才问我,咋样才能快速整明白,出成果。

我说,找几篇有影响力的三维点云的综述论文(引用量大于100的)研究一下,沿着发展脉络,可以快速上手。
她说,不行啊,三维点云坑太大,网上没有啥好的资料,而且论文中的算法非常复杂,基础内容没有搞懂,没法上手。包括:
……
我哑然一笑,感叹学妹不容易。看在她这几天请我吃饭的份上,我联系上一位新加坡国立大学的博士大佬,给她总结了一份三维点云的学习路径。
这不,刚把资料给学妹一个月,她的学习不再慌张。
那么问题来了,新加坡国立大学的大佬到底给了啥资料?
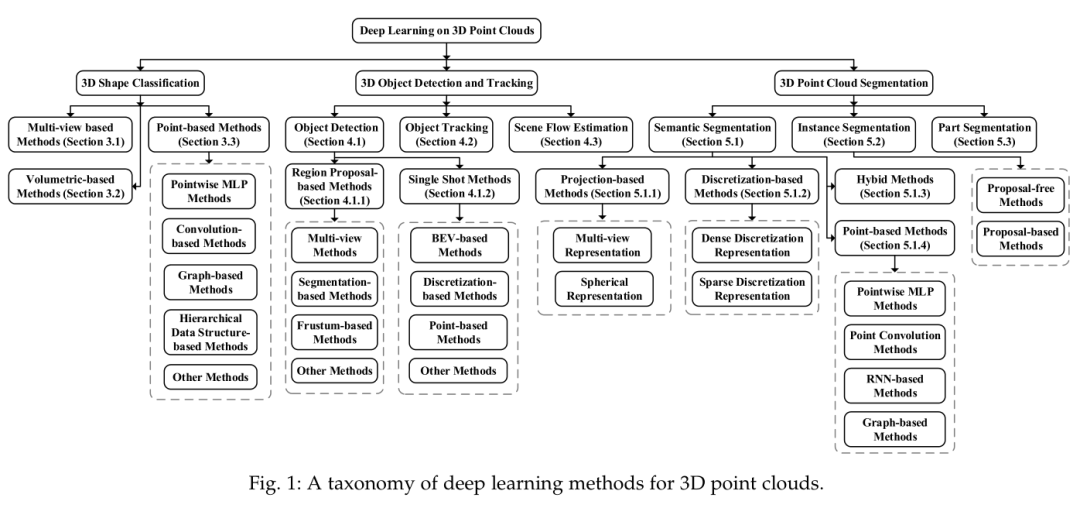
我们看看最新的三维点云综述,有个直观的感觉,就是当下主流是Deep Learning-based 的方法。但是这并不意味着,传统方法不再重要了。
恰恰相反,实际应用场景中,传统方法作为可解释的方法,担负着效果兜底的艰巨使命。毕竟,深度学习需要大量的数据,训练数据集中无法覆盖实际场景中的所有情形,因此当出现训练数据中没有的场景时,深度学习的效果往往也会比较差。
这里传统算法包括:
· 最近邻算法----基于二叉搜索树、KD-树和OCtree;
· 聚类算法----K-means、GMM和谱聚类;
这个学习路径不是我给出的,是新加坡国立大学的博士大佬给出的。
好家伙,这么一堆算法和论文,光是看就得几个月,何况还要搞懂和研究创新点。
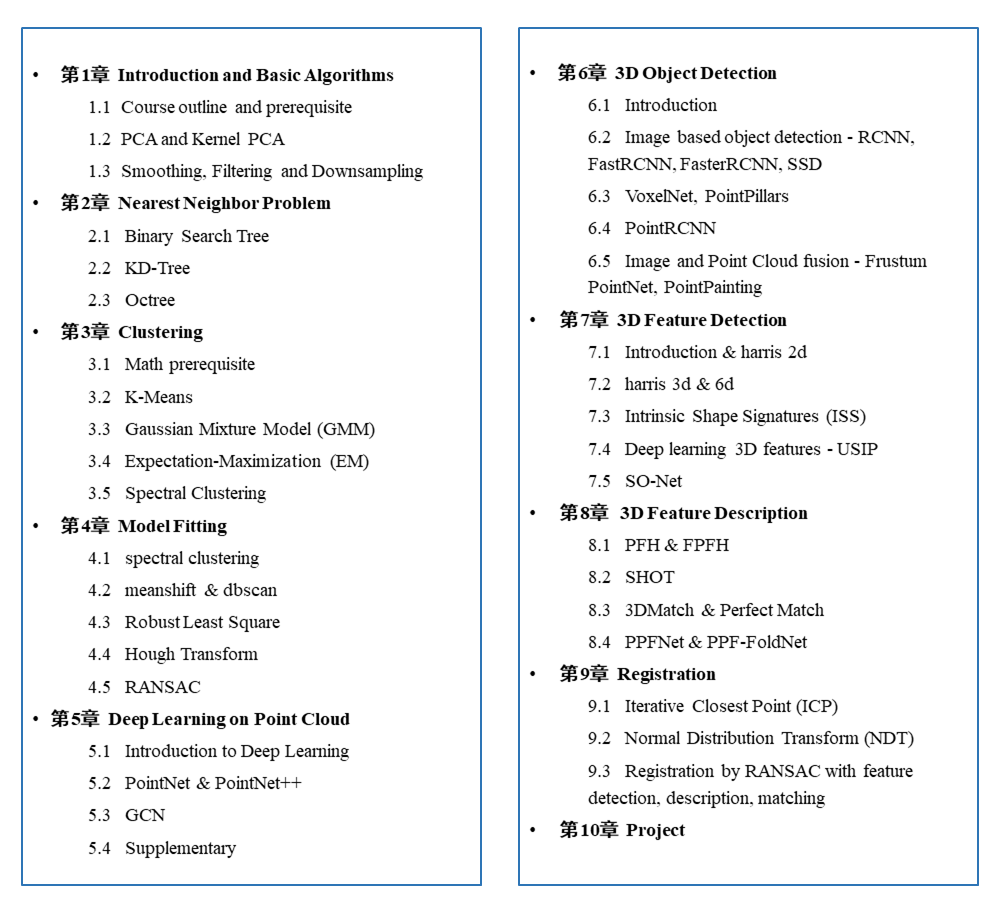
所以,博士大佬给出了一个明确的学习路径:
1. 首先从深度学习展开,包括经典的PointNet和PointNet++算法,以及GCN算法,这三个基础算法吃透完全可以入门深度学习三维点云处理;
2. 接着,就是三维点云的目标识别,包括了基本的RCNN,FastRCNN,FasterRCNN,SSD算法,以及VoxelNet,PointPillars,还有PointRCNN这一三维点云识别经典方法,当然还有点云和图像融合的方法:Frustum PointNet,PointPainting;
3. 其次,3D特征检测,大佬推荐了ISS、USIP和SO-net算法;
4. 再其次,3D特征描述,推荐的算法有:PPFNet和PPF-FoldNet,当然很多基础的匹配内容也有,包含:3DMatch和Perfect Match;
5. ……
学妹有了这份资料,信心倍增,但是也有一些新问题,她说基础不扎实,看paper以及开源代码效率比较低,要是能有人将这些内容整理成教学视频就好了。并且,教学视频最好能提炼各个方法的核心思想,这样能节省很多看paper的时间。
我吐了一口老血,学妹要求是越来越高!!!

大咖介绍

黎嘉信
自动驾驶研究科学家,新加坡国立大学博士
博士期间,师从电子与计算机系Ben M.Chen 教授及计算机系Lee Gim Hee教授,主要研究领域为计算机视觉、深度学习、机器人、无人驾驶。在C出票人2018,ICCV 2019,ICAR 2019,IROS 2017的顶级会议上以第一作者发表多篇论文。
学完课程你能收获
1.深入理解各个经典点云算法,涉猎前沿的感知方向的深度学习算法
2.了解在实际应用场景中各种算法的优势与局限,配有实践项目,学练结合
3.答疑群超多大佬,结实有学问、有经验的同行
课程大纲
优惠名额仅剩38人
扫码备注【实用】
抢占优惠名额啦~