
守护月球门户空间站的机器人

由于站内很少有人,月球门户空间站将依靠自主维护。
月球门户空间站是美国国家航空航天局(NASA)在这个十年内再次将宇航员送上月球计划的重要组成部分,这将是人类在近地轨道之外的首个永久性前哨站。该项目由美国国家航空航天局、加拿大太空总署(CSA)、欧洲太空总署和日本宇航局合作建设,目的是支持月球表面的作业,同时还将作为火星探索的补给站。
月球门户空间站将会比国际空间站(ISS)小得多,最初将只包括两个舱,随着时间的推移会增加更多舱。该空间站的首批组件将是带有居住和后勤前哨站(HALO)的动力和推进元件(PPE),计划于2024年11月与太空探索技术公司的猎鹰重型火箭一起发射。月球门户空间站相对较小可能是因为站内大多数时间不会有人,虽然宇航员可能会在站内停留几周,但预计月球门户空间站一年内大约有11个月不会有人。
这是对月球门户空间站的独特挑战。在国际空间站上,宇航员会花大量时间对空间站进行保养,但门户空间站必须在没有人直接协助的情况下,长时间维持自身的功能。
美国国家航空航天局约翰逊航天中心的月球门户空间站自主系统经理朱莉亚•巴杰(Julia Badger)解释说:“月球门户空间站需要自己完成宇航员在国际空间站上所做的工作。此外,其运行模式也有很大不同。目前,国际空间站的任务控制是全天候的,而我们最终希望月球门户空间站的地面遥控操作时间为一周只有8个小时。”国际空间站每天要接收数百个命令以维持其运行,这对月球门户空间站来说也是必要的,但这些命令将来月球自门户空间站自身,而不是来自地球上的人类。
为了实现这一目标,美国国家航空航天局正在开发一种运载系统管理器(VSM),这在某种程度上很像科幻宇宙飞船中无处不在的计算机系统。运载系统管理器将自主管理月球门户空间站的所有功能,使用智能软件和偶尔来自远方的人类的输入信息,处理所有可以管理的问题。“与国际空间站相比,这是一种新的思维方式。”巴杰说,“如果月球门户空间站出现问题,我们要么能与其共存一段时间,要么具备远程或自主修复的能力。”
虽然月球门户空间站本身可被视为机器人,但通过专用自动系统可以合理有效完成的工作是有限的。美国国家航空航天局必须在冗余与复杂性和质量之间进行平衡。例如,对于月球门户空间站的舱口是否应该能自行打开或关闭,进行了多方讨论,最终美国国家航空航天局决定其舱门需要手动操作。但这并不一定意味着月球门户空间站在没有人协助的情况下无法打开舱门;这只表示舱门需要机械臂进行操作,而非人工手动操作。
“我最终希望能有机器人可以打开舱门。”巴杰说。她解释道,门户空间站的设计考虑了潜在的舱内机器人(IVR),包括增加重要地点的视觉标识、在空间站内部周围放置便捷的充电端口,考虑打开舱门所需的力量与机械臂的能力相符。门户空间站系统的部件可能是模块化的;在需要的时候,机器人可以移除或更换这些模块。巴杰说:“在月球门户空间站的设计中,我们正在尝试做出明智的决策,不增加太多的质量,但便于机器人在空间站内工作。”
美国国家航空航天局已经积累了丰富的舱内机器人的经验。从2011年起,全尺寸人形机器人Robonaut 2已经在国际空间站上度过了多年,学习执行本应由人类宇航员完成的任务。最近,一组3个可自由飞行的立方体机器人Astrobee在国际空间站上定居了下来,进行自主感知和导航试验。目前,美国国家航空航天局的自适应自主看管综合系统(ISAAC)项目正在探索如何将类似Astrobee的机器人应用到月球门户空间站的各项任务中,包括监测空间站的运行状况以及自主移动货物等任务。但在短期内,巴杰认为:“维护月球门户空间站,例如使用机器人断开损坏的部件,将比后勤任务更重要。”

巴杰认为,类似Robonaut 2的通用可移动机械手和类似Astrobee的自由飞行器的组合是一个很好的搭配,这种组合符合当前月球门户空间站舱内机器人的总体概念。这并不是说最终月球门户空间站的舱内机器人必须与在国际空间站上工作的机器人外形相同,但它们将受国际空间站上的机器人启发,并充分利用美国国家航空航天局目前在国际空间站上工作的机器人的所有经验。

巴杰说,一定数量的专用机器人也许很有用。“例如,如果需要钻到(设备)机架后面,那么你可能想要一个蛇形机器人。”
虽然美国国家航空航天局正在积极准备月球门户空间站的舱内机器人,但这种机器人尚未诞生。美国国家航空航天局自己不会制造这种机器人,要靠行业合作伙伴提交的符合美国国家航空航天局要求的设计。在发射时,可能至少在最近几年,月球门户空间站要在没有内部机器人协助的情况下照料好自己。不过,门户空间站的目标之一是在与地球没有任何联系的情况下,完全自主运行3周。其目的是模拟地球与火星之间3周的行星聚合,此时太阳会阻隔两个星球之间的所有通信。巴杰说:“我认为我们应该搭载舱内机器人。如果真的想要让月球门户空间站自我维护21天,那么舱内机器人将是其中非常重要的部分。此外,因为要探索火星,我认为机器人是必不可少的。”
要让月球门户空间站长期自主运行,舱内机器人只是机器人团队的一半。空间站要依靠复杂的外部基础设施,例如动力、推进、热控制等。从2001年以来,加拿大臂2号一直驻扎在国际空间站上,它是一个17.6米的机械臂,它能够在空间站外围移动,在空间站内部或地面操作员的控制下抓取和放置物体。
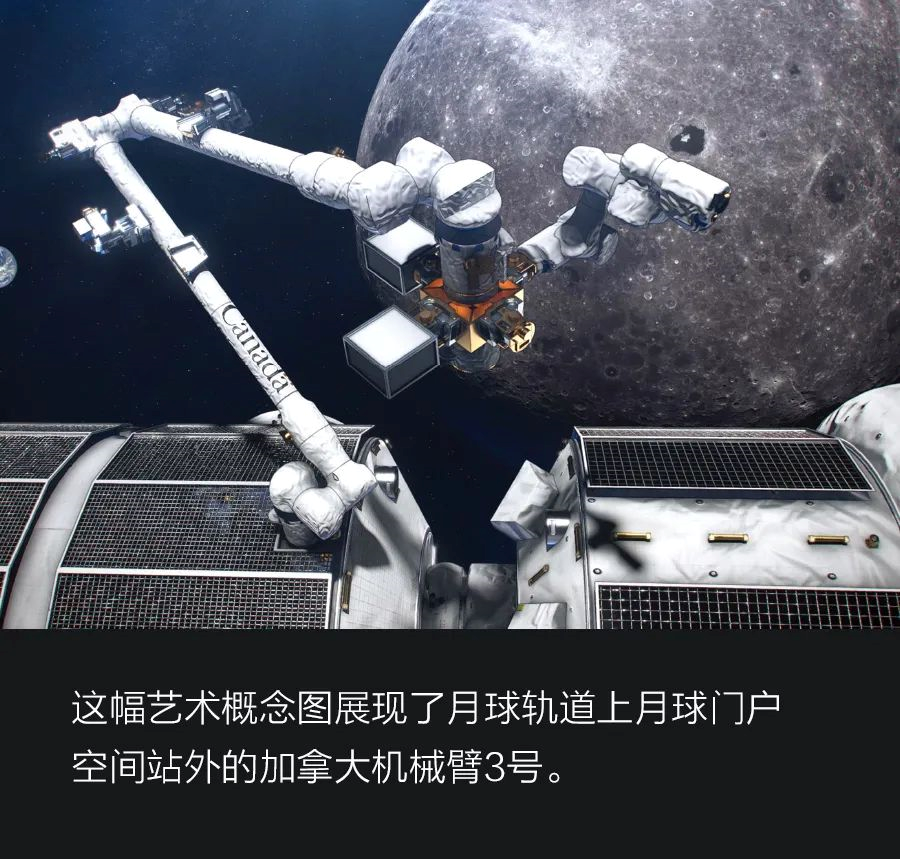
加拿大太空总署正在与加拿大公司MDA一起为月球门户空间站开发新型的机械臂系统,名为加拿大臂3号,并计划于2026年发射。加拿大臂3号将包括一个8.5米长的机械臂,用于抓取航天器和移动大型物体,以及一个灵巧的小型机械臂,可用于执行精密的任务。小机械臂在需要的时候甚至能够维修大机械臂。加拿大太空总署月球门户空间站首席工程师和系统经理丹尼尔•雷伊(Daniel Rey)表示,加拿大臂3号与其前任的真正区别在于其控制方式。“加拿大臂3号最新颖的特点之一是它不需要机组人员,能够自主运行。”雷伊说。它的这种能力依靠的是新一代软件和硬件,它们赋予了该机械臂对刺激做出反应的能力。
尽管月球门户空间站距离地球的距离是国际空间站的1000倍,但雷伊解释说,距离增加(约40万公里)并不是加拿大臂3号增加自主性的必要条件。“出人意料的是,月球门户空间站在绕月轨道上的位置产生的到地球的信号延迟,与近地轨道位置信号经过各种地面站所产生的延迟没有什么不同。如果加拿大臂3号准备去探索情况不同的火星,那么我们认为其需要有更多的自主性。”
加拿大臂3号在月球门户空间站的自主任务将包括外部检查、卸载物流运载工具、部署科学荷载,以及用备件更换损坏部件维修门户空间站。雷伊告诉我们,还将有一个技术后勤气闸舱以及一个移动工作台,用于将设备移入和移出门户空间站。“有可能在外部部署科学载荷,或将外部系统拿到内部来维修,也可用于实现未来内部机器人系统与加拿大臂3号的协作。我认为这将是一件非常令人激动的事。”
虽然月球门户空间站的机器人居民还需要几年才能到达,但当动力和推进部件以及居住和后勤前哨站于2024年11月进入月球轨道时,该空间站将(根据需要)在很大程度上自主运行。届时搭载的还有几项科学载荷,包括太阳物理学和空间气象实验。
不过,月球门户空间站本身就可以说是最重要的实验。其自主系统无论是否体现在内部或外部机器人,在确信其技术足以进行深空旅行之前,都将经过连续的测试。除了要在没有通信的情况下运行21天,月球门户空间站的最终要求之一是能够在没有航天员到访的情况下,正常运行3年。要准备探索火星和更远的太空,其自主性和可靠性必需达到我们要求的这一水平。
>>>
充满激情的新时代,
充满挑战的新疆域,
与踔厉奋发的引领者,
卓尔不群的企业家,
一起开拓,
一起体验,
一起感悟,
共同打造更真品质,
共同实现更高价值,
共同见证商业航天更大的跨越!
——《卫星与网络》,观察,记录,传播,引领。
>>>
· 《卫星与网络》特别顾问:王兆耀
· 《卫星与网络》编辑委员会
高级顾问:王国玉、刘程、童旭东、相振华、王志义、杨烈
编辑委员:曹志刚、陈嵩辉、邓中亮、荆继武、景贵飞、郎燕、刘进军、刘天雄、宁振波、秦智、汪春霆、吴季、徐小舒、阎丽娟、赵敏、肇启明、周建华、朱铎先
· 《卫星与网络》创始人:刘雨菲
· 《卫星与网络》副社长:袁鸿翼
· 《卫星与网络》常务副社长:冉承新